 電子發燒友App
電子發燒友App


信息社會已步入智能時代發展階段,智能手機、智能可穿戴設備、無線智能網絡、智能汽車、智能無人機和智能機器人等智能設備的創新與發展正在或將要改變信息社會的各個方面,而作為智能時代發展的基礎和關鍵技術之一,MEMS智能傳感器也已進入快速發展的新階段。
20世紀70年代后期隨著微電子的發展,可賦予傳感器以“智能”的功能,人們提出智能傳感器的概念,其包含傳感器、執行器、合適的電源、內在的計算能力、用于數字信息的通信接口和標識。
20世紀80年代初期,研究人員開始直接以硅(Si)材料實現機械器件,由于微電子二維的加工技術向三維加工的擴展,有可能實現Si的機械器件和微電子的集成,1986年美國DARPA在提案中提出了微機電系統(MEMS)的概念;1987年,人們在Si芯片上研制出可動的微部件、齒輪、渦輪等,成為MEMS研究的重要標志。這種Si芯片上的微小機器在日本被稱為微機械,在歐洲被稱為微系統,其具有三大特征:小型化、多樣性和微電子學。
MEMS技術用于傳感器制造可使傳感器尺寸更小、精度更高和具有大量生產的潛力,MEMS技術和微電子技術在傳感器領域的結合使MEMS智能傳感器應運而生。20世紀90年代初,溫度、振動和沖擊的MEMS智能傳感器開始用于航天發射運載的健康管理;此后,MEMS智能傳感器用于小型化的慣性導航系統、微型智能傳感和汽車工業的安全系統。
進入21世紀,MEMS智能傳感器進入了消費電子領域,2007年三軸MEMS加速度計用于智能手機成為MEMS智能傳感器發展的分水嶺,新一代MEMS智能傳感器成為移動網絡智能終端的顛覆性技術,開啟了移動智能網絡的新發展。智能時代的開啟要求MEMS智能傳感器向低成本、多傳感器集成、更高精度、遠程監控和自適應傳感器網絡接口等方向發展,使MEMS智能傳感器的傳感部分和電子學架構均有長足的進展。
博世BHI160BP,業內首款為可穿戴設備設計的位置跟蹤智能傳感器
MEMS智能傳感器的種類很多,本文選擇其中用量較大、發展較快的慣性、壓力、溫度和生化等新一代MEMS智能傳感器作為典型代表,分析其應用背景和技術的發展特點,介紹其近期的技術創新發展,以便把握MEMS智能傳感器的發展動向。
1. MEMS慣性智能傳感器
MEMS慣性智能傳感器是應用最多的智能傳感器,如MEMS加速度計、陀螺儀和慣性測量單元等智能傳感器已廣泛應用于智能手機、平板電腦和可穿戴智能硬件,其發展方向是新一代電子學架構、多功能集成和高精度。IEEE 1451標準把智能傳感器定義為具有小內存和能與處理器和數據網絡進行通信的標準物理連接的傳感器,由具有信號調制的傳感器、嵌入式算法和數字接口等三者相結合而成。
2016年,R. L. Leal等人將目前傳感器發展分為五代,其中第三代到第五代為智能傳感器。第一代傳感器中不包含電子學部分;第二代傳感器是傳感系統的一部分,并采用傳感器的遠程控制;第三代傳感器包含MEMS傳感和信號放大等信號調節;第四代傳感器包含MEMS傳感、信號處理、信號調節和數字端口等,允許傳感器尋址并可通過傳感器和微控制器之間的通信來實現自我評估的功能;第五代傳感器包含多個MEMS傳感、信號調節、微控制器、數字端口和ADC等,具有指令和數據的雙向的通信、全數字化傳輸、本地數字處理、自我測試、用戶定義算法和補償算法等特點。
為應對多個傳感器數據融合的新挑戰,目前新一代MEMS慣性智能傳感器已應運而生。2011年,S. G. Ducouret報道了新一代智能傳感器,其代表是飛思卡爾半導體公司開發的三軸MEMS加速度計MMA9550L,在電子學方面的設計特點是增加了嵌入式32位微處理器、Flash、RAM和ROM等IC,以適應低成本處理數據和靈活重新配置內嵌的功能以及融合外部傳感器數據。
為適應增強現實、沉浸式游戲、個人健康與健身、室內導航和其他需要環境意識的智能硬件應用的需要,2013年,S. Finkbeiner報道了Bosch公司開發的尺寸為3.0 mm x 4.5 mm x 0.95 mm的系統級封裝(SiP)集成的九軸MEMS智能傳感器BNO055,傳感部分包含三軸12位加速度計、三軸16位陀螺儀和三軸地磁傳感器,其電子學部分包括可運行傳感器數據融合軟件BSX3.0的32位微控制器;其中的BSX3.0軟件可將來自多個傳感器的原始數據融合至最佳性能,并具有支撐九軸的傳感器、嵌入式微控制器和外部應用處理器等運行的功能,其能夠和微軟、安卓等軟件兼容并具有可擴展架構。
為適應可穿戴設備和物聯網對結構緊湊、多功能傳感的需求,2017年,F. Y. Kuo等人報道了基于諧振的MEMS結構的單片多傳感器設計,采用0.18 um 1P6M CMOS/MEMS工藝,以諧振器作為基本構建塊,其中多個MEMS傳感器包括環境溫度傳感器、環境壓力傳感器、加速度計和陀螺儀傳感器,并可以通過單一標準ASIC/MEMS的讀出電路和嵌入式MCU實現單片集成,其中嵌入式MCU負責數據變換和多傳感融合。
在無GPS的環境下,精確的個人慣性導航系統對于要求苛刻的應用,如消防和救援任務等是至關重要的。2018年,Q. B. GHO等人報道了采用MEMS可穿戴地面反應傳感器陣列和接口ASIC的個人慣性導航系統。該系統的MEMS IMU包含三軸加速度計、三軸陀螺儀和三軸地磁傳感器,陀螺儀和地磁傳感器結合可提供取向信息,在時間上積累的加速度數據可得到距離信息。為了實現高性能導航,當腳接觸地面時,準確地重置IMU的每一步中時間積分是至關重要的。采用MEMS地面反應傳感器陣列和一個接口ASIC能夠準確地探測到地面上的時間。采用高度系統集成方法設計了低功耗的CMOS集成電路,并與有效的系統校準技術及傳感器數據融合和處理算法相結合,實現了該個人慣性導航系統在3km步行距離時,無GPS的位置精度達到5.5m。
為了適應設備導航級應用的需求,高精度MEMS慣性智能傳感器也是重要的發展方向。其中MEMS加速度計的創新技術有:閉環MEMS加速度計傳感器和電子學閉環系統架構的創新設計;亞心偏差不穩定性的低功耗MEMS硅諧振加速度計的設計;微型低成本精密石英擺式加速度計與閉環配置的電子伺服回路的設計以及具有自恢復信噪比功能的地震檢測的CMOS MEMS加速度計設計。
為了達到慣性導航等級加速度計性能的要求,2016年,B. Grinberg等人報道了閉環MEMS加速度計的設計與生產。傳感器采用SOI芯片內平面技術,其優點是可實現抑制寄生效應的全橋電容感應;采用高度對稱的機械結構以獲得更好的溫度穩定性和不需要真空封裝;采用大質量塊的設計有助于增強敏感度。電子學閉環系統架構采用4級△Σ調制器將外部加速度轉換為高頻率信號和比特數字信號;其設計的重點包括精確的時鐘、高穩定參考電壓和管理配置各系統參數的微控制器,以改善噪聲、線性和穩定性。MAXL-CL- 3030閉環加速度計的測試結果證實了導航級設計,偏置穩定性《20 ug,典型非線性為0.01%,在20~2 000Hz的頻率范圍內振動校正誤差小于10 ug/g2rms。
實現導航應用的關鍵任務對于MEMS加速度計是一重大挑戰。硅諧振加速度計在大線性范圍內具有優勢,其標度因子具有良好的穩定性,以及調頻輸出的準數字性質,可有助于讀出系統免于電路塊參數變化的影響。2016年,J. Zhao等人報道了具有亞ug偏差不穩定性和30g全量程的低功耗MEMS硅諧振加速度計。MEMS傳感器的結構包含質量塊、兩個杠桿和兩個諧振,采用晶圓級真空封裝的80um厚的SOI工藝實現。MEMS諧振器嵌入振蕩環路中,振蕩維持電路包含低噪聲前端放大、VGA、低噪聲自動放大控制電路等。測試結果表明,該硅諧振加速度計在±30g全量程范圍,偏置不穩定度小于1ug,速度隨機游走為2.5 ug/√Hz,其諧振頻率為15 kHz,功耗在1.5 V下為3.5 mw。
加速度計是捷聯式慣性導航系統的關鍵器件之一,可測量一些加速度,以獨立的方式為主機運載提供指導和飛行控制參數。為了適應高動態、精確制導系統的要求,2017年,J. Beitia等人報道了用于高動態、精確制導系統的微型加速度計。該微型低成本精密石英擺式加速度計,其質量塊是由直徑12mm的高純熔融石英晶片通過兩個厚15um鉸鏈連接到一個剛性圓盤結構外框的結構所組成,質量塊和兩個對稱磁結構之間的氣隙為20um。為了獲得較低的偏置振動校正誤差,采用閉環配置的電子伺服回路,通過適當的優化增益設計和優化加速度計設計,以減少由于電極的氣隙中氣體的不對稱行為引起的轉動剛度不匹配。測試結果表明,石英擺式加速度計在80g的動態范圍下,在50~200Hz和750~2000Hz的頻段下的振動校正誤差分別小于10和25ug/g2rms,標度因子溫度穩定性小于100ppm,其尺寸為直徑18mm、高度11mm,質量為25g。
2018年,C. T. Chiang報道了用于物聯網設備中的地震檢測的CMOS MEMS加速度計設計。采用0.35um 2P4M具有3V電源的CMOS技術實現單片集成,其電容式加速度計的質量塊和梳齒結構的電極均由SiO2制備,采用應力補償框架的設計以減少殘留應力。CMOS傳感電路包含:電容一電壓變換器、解調斬波器、5級開關電容低通濾波器、可編程增益放大器和4級△Σ調制器(DSM)。同時DSM還有兩路反饋回路,由整流器、峰值檢波器和靜電力傳感器組成。測試結果表明,該加速度計的連續時間電壓模擬傳感電路的敏感度為131.99mV/g,在0.25~6.75g內的最大的非線性是1.21%,本底噪聲是0.579mg/√Hz,y軸和z軸的非線性分別小于0.05%和1.38%。加速度計經連續三周不停顫抖試驗后,峰值信噪比(SNDR)下降為49.1dB,但在0.5s內其會自動清零,使傳感器的峰值SNDR達到75.2dB。芯片面積為3030um x 2997um,3V下的功耗為5.2mW。
提高MEMS陀螺儀的設計創新技術有:采用驅動模式和傳感模式之間具有非零頻率間隔和基于DSP的電子學調諧叉齒MEMS陀螺儀;低功耗、低偏置不穩定度的CT- △Σ MEMS陀螺儀讀出系統;采用低功耗、低相位噪聲的頻率調制工作的IC和具有偏航速率與俯仰速率的雙傳感器系統相結合;高標度因子精度和高偏置穩定度的速率斬波到數字的頻率調制陀螺儀和基于神經網絡的MEMS慣性傳感器的溫度補償模型。
為實現重量輕、成本低和精度高的尋北系統,2015年,B. Johnson等人報道了用于精確尋北的調諧叉齒MEMS陀螺儀。采用驅動模式和傳感模式之間的非零頻率間隔設計和基于DSP的電子學,實現了導航級的諧振梳齒MEMS陀螺儀,其偏置穩定度為0.03°/h,隨機游走(ARW)為0.002°/√h。為了滿足對高性能和穩定的慣性傳感器的需求,MEMS陀螺儀要采用閉環控制方案,與開環解決方案相比,其具有更高的復雜性和更大功耗。
為適應移動產品低功耗的需要,2017年,M. Marx等人報道了1.71mW功耗、0.9°/h偏置不穩定度的CT-△Σ MEMS陀螺儀讀出系統。其傳感器是驅動和傳感的雙諧振MEMS陀螺儀,其讀出系統芯片采用功耗較低的CT-△Σ機械-電子學架構。在驅動邊為鎖相(PLL)環基環路,包含電荷泵、驅動器、AGC、c/v變換、具有電流控制振蕩器的PLL;在傳感邊為CT-△Σ特點的環路,包含c/v變換、2階Gm-C BPF、噪聲觀察頻率調諧電路(NOFT)、9位電流DAC和反饋環路。該電路的設計亮點是提出將機電CT-△Σ架構中的電4子帶通濾波器(BPF)的輸入端,嵌入基于噪聲觀測的頻率調諧電路;在陀螺儀工作時,使角速度帶寬和驅動頻率之間的匹配精度優于0.25%,且其功耗和面積分別僅為27uW和0.06 mm2。測量結果表明,在-30~85℃內,該MEMS陀螺儀的平均點噪聲為0. 002°/s/√Hz,偏置不穩定度為0. 9°/h。不需要昂貴和耗時的校準程序,就能獲得廉價、穩定的振動MEMS陀螺儀,也是具有挑戰性的技術攻關。
2018年,P. Minotti等人報道了高標度因子穩定性的調頻MEMS陀螺儀的三軸傳感器和集成電子學設計。采用低功耗、低相位噪聲的頻率調制工作的IC和具有偏航速率與俯仰速率的雙傳感器系統設計相結合,實現高標度因子穩定性的3軸頻率調制MEMS陀螺儀。采用厚膜外延多晶硅表面微機械工藝實現24um厚的內平面結構的偏航速率傳感陀螺以及24um厚的外平面結構的俯仰速率傳感陀螺。采用0.35um CMOS工藝實現低功耗、低相位噪聲的反饋振蕩結構的IC,其包含電容到電壓的放大器、90°移相器、硬限幅器、H橋電路和自動增益控制電路。測試結果表明,該調頻MEMS陀螺儀在20~70℃內,可重復性的標度因子為0.5%,溫度穩定性為35ppm/K,而其電流消耗僅為160uA,同時其噪聲性能約為10mdps/√Hz。
目前將MEMS陀螺儀速率的測量變換為頻率偏移的測量。在這種情況下,標度因子是傳感器和讀出電路的復雜函數;任何底層參數的變化都會導致測量誤差。2018年,B. Eminoglu等人報道了具有40ppm標度因子精度和1.2°/h偏置穩定度的速率斬波到數字的頻率調制陀螺儀。其總體的解決方案是直接測量與速率相關的頻率,并將頻率與一個精確的時鐘參考進行比較后,將其轉換為數字輸出。傳感器的質量塊由兩個正交諧振器組成,其諧振頻率是由兩個維持電路激勵。對于在x-y通道的位移中每90°的相移,質量塊的運動遵循一個循環的模式。在此模式中,速率的輸入和質量塊振蕩頻率的偏移相關。其讀出電路包含:跨電容放大器、相移器、振幅檢測器和可變增益放大器(VGA),由兩路A/D和DSP實現頻率到數字的變換。測試結果表明,在非控制環境溫度下24h,該調頻MEMS陀螺儀的偏置穩定度為1.2°/h,經一級補償后的標度因子的誤差小于40ppm。為了開發MEMS慣性導航系統的全部潛力,提高其精度,開發一個與溫度相關的模型來補償誤差是很有必要的。傳統的溫度補償方法依賴于多項式回歸法,沒有考慮到傳感器誤差中固有的非線性。
2018年,G. Araghi等人報道了基于神經網絡的MEMS慣性傳感器的溫度補償模型。采用徑向基函數神經網絡作為函數近似的工具,可以獲得傳感器測量值、溫度和誤差之間的非線性映射。選擇傳感器的溫度和測量值作為神經網絡的輸入,并選擇誤差信號作為神經網絡輸出。該網絡通過使用正交最小二乘法來進行正向選擇的訓練。采用徑向基函數神經網絡,熱補償被認為是函數逼近問題,在較大溫度范圍內能補償加速度計和陀螺儀的誤差。經實驗驗證和比較,結果表明,IMU的溫度變化范圍為22~51℃,在MEMS加速度計和陀螺儀的靜態場景中,基于神經網絡的方法可使兩者的平均誤差改善99%;而采用多項式回歸方法使加速度計和陀螺儀的平均誤差最大改善分別為69%和87%。在動態測試中,采用多項式補償和神經網絡補償技術對慣性導航的平均位置誤差分別改善了49%和81%。
2. MEMS壓力智能傳感器
MEMS壓力智能傳感器是最廣泛使用的MEMS產品之一,可用于智能手機、汽車、航空動力學、工藝控制和生物醫學等方面,壓力的傳感范圍也很寬,從微壓、低壓、中壓到高溫高壓。根據傳感原理,MEMS壓力傳感器可以分為壓阻式、電容式、光學、諧振傳感器以及其他類型等,其中最常用的是壓阻傳感器,本文以MEMS壓阻傳感器為主、MEMS電容傳感器為輔來分析其發展特點。
MEMS壓力傳感器的研究始于20世紀50年代,經歷了金屬一光闌壓力傳感器、摻雜劑擴散膜的硅壓阻式傳感器、離子注入的硅壓阻式傳感器、硅融合成鍵MEMS傳感器等發展,于21世紀初發展為采用表面微機械技術的新一代壓力傳感器。2005年,G. Lammel等人報道了Bosch公司開發出新一代MEMS壓力智能傳感器,基于先進的多孔Si膜工藝,采用多孔Si和外延以形成帶腔體的Si單晶膜。后來批產的代表產品為BMP085,其電子學部分包含ADC、控制器、E2PROM和I2C總線等電路,計算軟件為Bosch公司的C代碼,該傳感器在300~1100hPa的壓力內,0~65℃下的壓力絕對精度為±1.0hPa。近幾年MEMS壓力智能傳感器的研究熱點為新傳感結構、新補償算法與電路設計、寬禁帶材料高溫高壓傳感器、壓阻懸臂微傳感器和納米尺度傳感結構。
MEMS壓力智能傳感器具有小尺度、直接信號變換機制和成熟制造等特點,但在微壓測量領域,傳感器的靈敏度和線性度之間的權衡總是不可調和的。因此,減輕其敏感性和線性之間的矛盾是提高傳感器精度的關鍵。2017年,C. Li等人報道了4個短梁和一個中心方形凸起(FBBM)組成的新傳感膜結構的壓阻壓力傳感器的設計。通過將4個短梁引入到膜中,將導致出現應力集中區域,壓敏電阻器被放置于該區域,薄膜上的小偏轉可改善壓阻靈敏度。此外,具有中心方形凸起的膜可起到減少偏轉的作用,從而降低了壓力的非線性。通過有限元分析、傳感器的系列方程的建立和優化設計以獲得FBBM結構膜的尺寸。設計了基于MEMS體微機械工藝和陽極鍵合技術的壓力傳感器芯片的主要制造工藝。模擬結果表明,在室溫下,壓力范圍為0~5 kPa,其靈敏度為4.71mV/V/kPa,低壓力的非線性為0.75%。
智能中央空調系統中需要高產量、高性能、低量程的壓力傳感器,2017年,H. S. Zou等人報道了采用體Si下薄膜(TUB)的微機械技術的高性能低量程差壓傳感器。在以單圓片為基礎的TUB結構中,壓力所引起的應力高度集中在體Si梁一島結構處以便壓阻的讀出,此處在體硅結構下面所形成的薄而均勻的多晶硅隔膜可以承受壓力。梁一島增強結構可以減少偏移以獲得高線性的輸出。在體硅島下面所形成的微柱可作為超限保護的止動器。對1.2mm x 1.2mm大小的傳感器芯片進行設計和圓片制造,測試結果表明,在1.2kPa的壓力測量范圍,其輸出為22mV,具有好的線性度±0.05% FS和100倍過壓力的保護能力。
2018年,A. V. Tran等人報道了采用交叉梁膜和半島形相結合的新傳感膜結構的低壓力傳感器。基于優化靈敏度設計,采用有限元分析方法,預測了在不同壓力下壓電電阻以及膜的撓度所產生的應力。模擬結果表明,和其他傳統的隔膜類型相比,采用該新傳感膜結構的傳感器可以顯著提高靈敏度,而膜偏轉和非線性誤差顯著減小。采用體Si微機械工藝研制出低壓力傳感器,測試結果表明,在室溫下,壓力范圍為0~5kPa,其靈敏度為257mV/kPa,全量程的非線性為-0.28%。在壓力變送器應用中,經常在極端條件下使用,靜態壓力比壓差的正常工作范圍高出數百倍,為此壓力變送器所用壓阻壓力傳感器必須具有抗超壓的能力。
2016年,T. Tokuda等人報道了采用三維刻蝕和晶圓級疊層加技術并具有內置超壓保護的新型壓力傳感器。傳感芯片結構由傳感器隔膜、兩個具有非球面的表面結構的止動器上下兩個玻璃板組成;在止動器非球面的表面上制備蜂巢式圖形以防止傳感器隔膜粘在它上面。采用灰度光刻、晶圓級表面鍵合以及Bosch工藝和非Bosch工藝相結合等方法實現該新結構。該傳感器能夠有效地抵抗60MPa的過壓,比正常工作范圍內的壓力100kPa高出600倍;此外,還可獲得芯片的壓差和靜態壓力的高精度測量值。
壓力測量系統是石油化工、生物醫學、電廠等工業領域中生產過程和管理的重要設備。MEMS壓力智能傳感器具有低成本、小尺寸、易制造的特點,廣泛應用于工業壓力測量系統中。由于硅傳感器固有的對溫度的交叉敏感性,有必要對熱漂移進行溫度補償以提高其精度。2014年,G. W. Zhou等人報道了基于神經網絡的硅壓阻壓力傳感器的溫度補償系統。系統硬件包括以下模塊:壓力傳感器、溫度傳感器、信號調節模塊、微控制單元、液晶顯示器、通信模塊、電源模塊和接口電路。開發了一種利用神經網絡進行溫度補償的程序,并選擇反向傳播神經網絡和徑向基函數神經網絡兩種算法來訓練三層神經網絡。實驗結果表明,在0~20 MPa壓力內,-20~60℃下,與初始數據相比傳感器的最小二乘線性度從1.0819% FS改善到0.19% FS,其精度由0.739 5% FS改善到0.2% FS。主流智能MEMS壓力傳感器的設計特點是具有微控制器(uC)或數字信號處理器(DSP),其中加入壓力傳感器的補償算法,進而實現了數字通信。
2016年,A. H. Gonzdlez等人報道了基于DSP-uC組合MEMS智能壓力傳感器系統。智能壓力傳感器的新架構是基于數字信號處理器與微控制器組合和采用一種熱補償的分段近似算法。其硬件部分包含MEMS壓力傳感器、溫度傳感器、MAXl464型DSP(內部集成有運算放大器、PGA、MUX、CPU、ADC和DAC)、PIC16F688型微控制器、數字輸出驅動器和電壓參考源等電路。實驗結果表明,在0~10bar(1bar=10?Pa)和0~80℃的條件下,該智能壓力傳感器系統獲得全量程數字輸出總誤差小于0.15%(包括非線性、不可重復性、滯后效應、對補償的熱效應和對跨度誤差的熱效應),而全量程模擬輸出總誤差小于0.18%,最小的壓力發送響應時間為2ms。小尺寸的壓阻式MEMS傳感器通常配置在惠斯登橋電路中,廣泛用于測量物理信號如壓力、溫度、力和氣體濃度。在測量中要對橋施加直流偏壓,由于橋的電阻很小(通常是1~10kΩ),所以它非常耗電。
2018年,S. Oh等人報道了集成于13mm3壓力傳感微系統中的2.5nJ的循環激勵的橋一數字轉換器。為降低惠斯登橋的激勵能量,采用負載循環激勵,與靜態偏置相比將橋電路激勵能量降低到1/125,同時采用節能的高能效循環激勵傳感器讀出電路,使橋電路激勵能量與靜態偏置相比降低到1/6000。壓力傳感微系統包括MEMS壓力傳感器、電池和6個IC層(射頻、電容去耦、處理器、能量采集器、光伏電池和電源管理單元),測量結果表明,該微系統在4 ms變換時間下分辨率達到1.1mmHg。
航天工業領域充滿了適應惡劣環境工作的微系統的發展機遇。正在開發可以檢測飛機引擎中的氣體排放、溫度、葉尖間隙和壓力等物理量變化的電子系統。寬禁帶半導體材料適合制備高溫工作的電子學有源器件。2016年,M. C. Scardelletti等人報道了飛機發動機健康監測的封裝電容式壓力傳感器系統。采用SiC MEMS電容壓力傳感器系統,其電子學基于Clapp型的振蕩器電路,包含6H-SiC MESFET、SiCN MEMS電容壓力傳感器、鈦酸鹽電容器、線繞電感器和厚膜電阻。壓力傳感器作為電容用于LC儲能電路,因此將壓力與振蕩器的諧振頻率相關聯。30mm x 70mm尺寸的金屬-氧化鋁封裝的壓力傳感器系統,能可靠地工作在壓力0~350psi(1 psi=6 895 Pa)和溫度25~540℃條件下,壓力靈敏度為6.8 x 10?2MHz/psi。溫度、壓力、燃料流量和轉子轉速的測量在高溫燃氣輪機的評估中是很重要的。藍寶石是一種具有高熱導率(40 W/(m·K))的電絕緣陶瓷,具有高熔點(2053℃),在高溫下保持很高的電阻率。
2018年,J. E. Rogers等人報道了基于藍寶石的隔膜和結構體的用于惡劣環境的無源無線微機電壓力傳感器。該MEMS電容式無源無線壓力傳感器是藍寶石基的隔膜與結構體以及鉑基的電容器;配置電容元件為槽形天線的一部分,設計該天線在遠場感應機構中運行,其電路的諧振頻率為15 GHz。電學接地面位于膈膜的背面,在施加壓力時膈膜偏轉,為此壓力傳感器的電諧振頻率隨施加到隔膜的壓力而改變。該傳感器最高工作溫度可達1000℃,高溫下的動態壓力靈敏度為21.7kHz/Pa,壓力范圍達800Pa。
為了克服傳統原子力顯微鏡(AFM)笨重、吞吐量低和操作不便等不足,2004年,S. Hafizovic等人報道了基于完全集成的壓阻懸臂梁陣列,用于表面成像和力反應研究的單芯片機電微系統。采用全集成壓阻懸臂梁陣列的單片原子力顯微鏡微系統,在片電子學部分包含模擬信號放大、具有偏移補償的濾波級、模擬數字變換器、強大的數字信號處理器和用于數據傳輸的芯片數字接口。該微系統大大降低了整體尺寸和成本,并增加了掃描速度,可以用標準的CMOS技術制造出來,并在隨后的微加工步驟中形成懸臂。測量結果表明,該微系統的力分辨率小于1.1nN,垂直分辨率小于1 nm。MEMS諧振懸臂傳感器可實現超靈敏的質量檢測,達到毫微微克的水平,通過進一步增加表面積與質量比,甚至可以達到更高水平。該技術已經被廣泛地用于生物分子識別、生物醫學檢測和DNA鑒定的研究。
由于壓電傳感MEMS諧振器具有自驅動自傳感、超低驅動電壓、低功耗以及與電路阻抗匹配等特點,比電磁諧振等其他模式集成于網絡傳感系統更具吸引力。但壓電傳感MEMS諧振器的優值(Q)有待提高。2008年,J. Lu等人報道了一種與CMOS兼容的高Q單晶硅懸臂梁,用于超靈敏質量檢測的具有芯片集成壓電驅動器。采用具有在片集成壓電鋯鈦酸鉛(PZT)驅動器的CMOS兼容的單晶硅懸臂梁應用于敏感的質量檢測。將PZT驅動器分離出來的設計可成功抑制PZT膜上的耗散的能量和其他負面影響。集成壓敏電阻惠斯登電橋的量規檢測諧振頻率,以便更好地集成和CMOS電路兼容。測試結果表明,寬為30um、長為100um的懸臂梁的Q值為1 115,比已報道的集成微懸臂梁的Q值高幾倍。
開發納米尺度傳感結構如碳納管(CNT)、石墨烯和納米線,用于壓力傳感器已成為重要發展方向之一,這些傳感器表現出新穎的靈敏度、快速響應和高的空間分辨率等特點。碳納米管具有小尺寸(直徑為1~100nm)、好的電學和機械性能。
2015年,A. Gafar等人報道了基于碳納米管的MEMS壓阻式壓力傳感器。采用電泳微組裝工藝形成的CNT基的MEMS壓阻壓力傳感器,成功地將聚甲基丙烯酸甲酯(PMMA)隔膜陣列中的CNT感應元件集成在一起,模擬結果表明,對于生物相容性和低成本應用要求,其可以替代硅壓力傳感器。石墨烯氧化物是石墨烯的一種非常重要的衍生物,是一種具有好的機械、熱和電氣性能的二維晶體。石墨烯氧化物泡沫具有優異的彈性特性和相對較高介電常數,它是未來可穿戴電子設備的一個新組成部分。
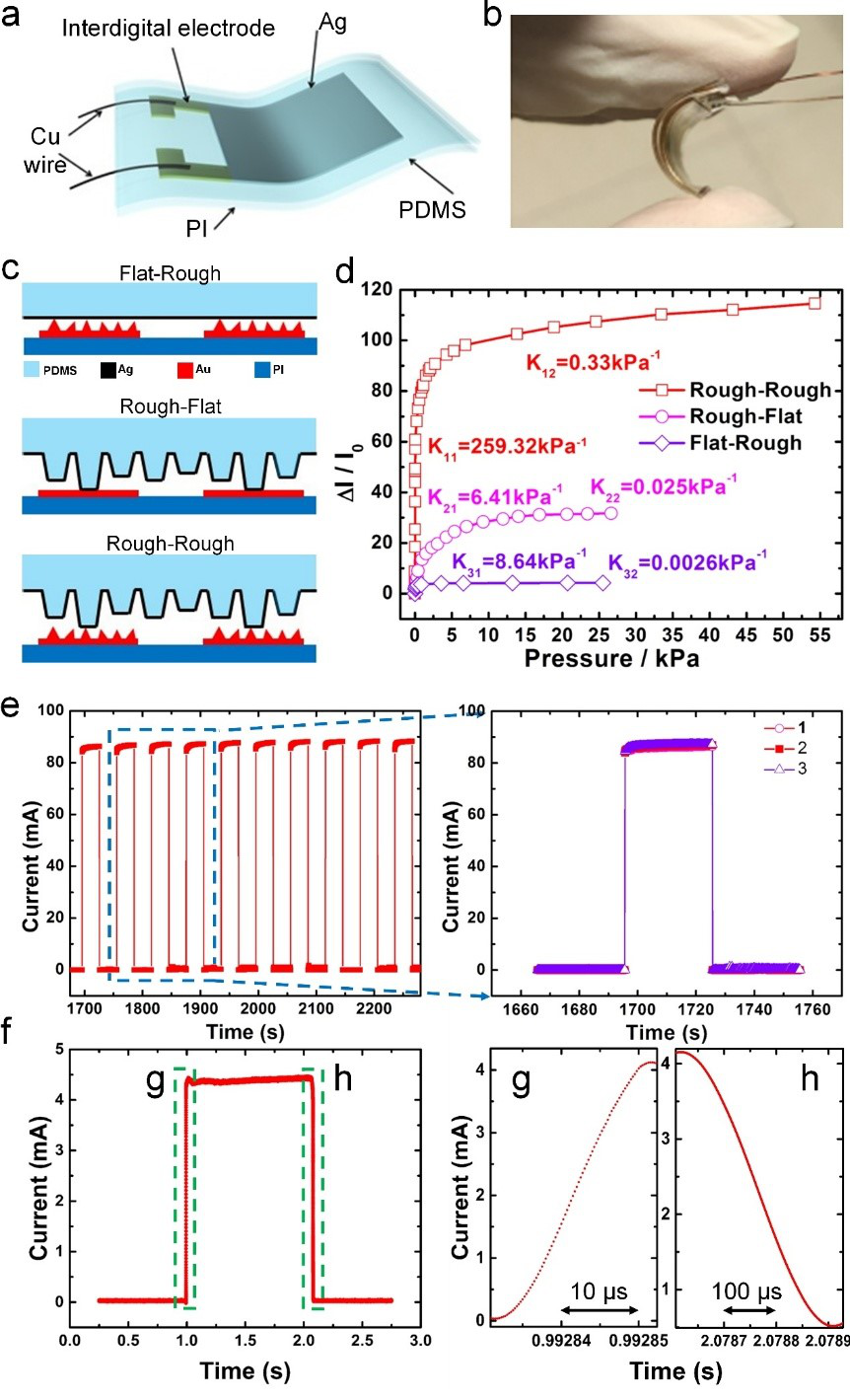
2017年,S. Wan等人報道了石墨烯氧化物作為電容式壓力傳感器的高性能介電材料的研究。采用濕法涂覆、冷凍和干燥等工藝將石墨烯氧化物泡沫夾在帶有圖形電極的聚酯薄層之間,制備成用氧化石墨烯作為高性能介質的電容壓力傳感器,其具有高效、低成本、大面積集成和圖形化等特點。該傳感器可以檢測到0.24 Pa的微壓力,并具有快速響應時間(約100 ms)和高靈敏度(約0.8 kPa?1);其靈敏度比聚二甲基硅氧烷層高2 x 103。該傳感器具有良好的耐久性(可經受大于1000次的加載/卸載循環和大于1000次的彎曲實驗)及定位壓力的空間分辨率。
2016年,H. P. Phan等人報道了自上向下制造的P型3C-SiC納米線(NW)的壓阻效應的研究。在Si襯底上外延生長載流子濃度為5 x 101?的3C-SiC薄膜,采用聚焦離子束工藝制成p型3C-SiC納米線(5um x 300nm x 300nm)。該納米線作為惠斯登橋電路中的一個壓敏電阻進行拉應力實驗(0~280u?)。實驗結果表明,其測量因子為35,比碳納管和石墨烯等硬材料的測量因子高一個數量級。SiC NW所具有的較大測量因子、相關阻值的變化和施加應力之間的線性關系,顯示出其用于納米機械系統傳感的潛力。










 工商網監
工商網監
評論