 電子發燒友App
電子發燒友App


自動駕駛圈內,激光雷達作為割韭菜第一快的刀,估計無人反駁。據不負責任統計,2022年國內將有十幾款車型搭載激光雷達上市。而其中大部分新車的上市策略又是:硬件預埋,功能開發驗證完成后再通過OTA更新。激光雷達廠商恐怕做夢都在感慨:頭茬的韭菜不僅嫩,割起來還特別順手。
而除了激光雷達,自動駕駛圈內另外一把普通的刀在經過重新淬火鍛造之后,也開始展現出割韭菜不凡的功力,這把刀江湖送其“4D毫米波雷達”稱號。通過在普通毫米波雷達的基礎上增加俯仰角測量的能力,從而實現被測目標高度數據的測量,最終也具有了和激光雷達相似的點云輸出能力。
4D毫米波雷達自帶速度信息的點云輸出,聽起來都有點讓人上頭。再加上可靠性、穩定性以及量產成本等方面完全碾壓等效線束激光雷達的優勢,也難怪媒體一致喊出了:自動駕駛傳感器領域的下一個風口、低線束激光雷達終結者等變革口號,并隱隱約約約展現出一股割韭菜第二快刀的潛質。
自動駕駛圈第二十三期,我們就來扒一扒藏在這邊刀背后的秘密,看其是憑真本領上位,還是主機廠的耍酷需要,抑或是Tire1為割韭菜放出的煙霧彈。
刀的誕生-多普勒效應
這把刀的誕生還要從古老的多普勒效應說起。
1842年,中國簽訂了近代史上第一個喪權辱國的不平等條約—《南京條約》,時刻溫習并銘記歷史。同年,奧地利物理學家多普勒發現了多普勒效應。所謂多普勒效應,是指波源和觀察者有相對運動時,觀察者接收到的頻率和波源發出的頻率并不相同,兩者之間的差值叫做多普勒頻率。
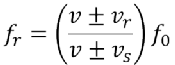
多普勒效用公式表達如下。式中,fr為觀察者觀測到的頻率,f0為波源發出的頻率,v為波的傳播速度,vr為觀察者的速度,vs為波源的速度。當觀察者或波源有向對方靠近的運動時,對應分子分母取減號,反之取加號。
如果我們在波源的位置放置一個探測器接收反射回來的波,通過檢測多普勒頻率,就可以測得觀察者相對于光源的移動速度。再根據波發出和接收的時間差,基于TOF原理,便可以計算出觀察者相對于光源的距離。
多普勒效應,奠定了毫米波雷達這把刀誕生的理論基礎。
刀的鍛造-發展簡史
毫米波雷達這把刀的雛形出現在20世紀四十年代的第二次世界大戰中,英國通過部署對空雷達站,有效抵御了德國空軍的一系列空襲行動。二戰中的一戰成名,也讓其在二戰后迅速推廣普及到各個領域。
毫米波雷達在汽車領域的應用可以追溯到1973年,德國AEG-Telefunken和BOSCH公司開始合作投資研究汽車防撞雷達技術,但由于技術和成本原因,一直未能大規模商業化落地。
20世紀80年代,歐洲在“歐洲高效安全交通系統計劃”指導下重新開啟了車載毫米波雷達的研制。并在技術和成本均實現突破后,迎來了汽車防撞雷達的廣泛應用。
里程碑事件是在1999年,奔馳在S級車上使用77GHz毫米波雷達實現了基本的自適應巡航功能,開啟了輔助駕駛時代,也迎來毫米波雷達在汽車領域的蓬勃發展。
毫米波雷達剛剛出道的時候,受制于芯片工藝等原因,一個雷達中需要配備七八顆射頻芯片才能保證基本的分辨率。這導致當時的毫米波雷達體積巨大,成本巨高,只在高端車型偶有應用。機械式激光雷達誕生的初期,各方面都像極了這位前輩。
進入到千禧年之后,伴隨著鍺硅半導體工藝的發展,毫米波雷達集成度大幅提高,成本大幅下探,在高端車型上的應用也迎來了一次小爆發。這又像極了混合固態激光雷達當前的局面。
2017年,TI推出了基于CMOS工藝的毫米波雷達芯片,一口氣將射頻芯片、數字處理芯片和微控制器三個模塊集成到一個SOC上,既顯著降低毫米波雷達的成本,又大幅拉低了毫米波雷達的開發難度。這又有點像我們期待的固態激光雷達的樣子。
更驚為天人的是,TI隨后將天線也集成在芯片里,推出了集成度更高的天線片上集成(AoP)芯片,直接將毫米波雷達價格拉到了百元級別,并提供了毫米波雷達開發傻瓜式工具鏈,國內由此掀起了轟轟烈烈的毫米波雷達創業及國產化浪潮。
刀的秘密-工作原理
一、使用頻段
毫米波雷達,從名字也可以猜測出,這是一種工作在毫米波頻段的雷達。而毫米波是指波長在1-10mm,頻率在30-200GHz的電磁波,其傳播速度和光速近似相等。這個頻段電磁波在探測能力、穿透能力、抗干擾能力等方面實現了“中庸之道”,完美契合車載領域。并助力毫米波雷達在車載傳感器領域贏得了“全天時、全天候”工作的美譽。
毫米波雷達主要使用24GHz,60GHz,77GHz和79GHz四個頻段。24GHz準確來說屬于厘米波,由于測量距離有限(60m左右),分辨率一般,常被設計為角雷達,探測大視場角范圍的近距離障礙物。60GHz由于受大氣衰減影響特別大,常被設計為生命體征檢測雷達,對車內生命體征及人員姿勢進行檢測。77GHz和79GHz由于測量距離較遠(200m左右),常被設計為主雷達,作為前向長距離感知的利器,這兩個頻段也是未來車載毫米波雷達領域的主流頻段。
二、基本組成
毫米波雷達核心組成部分包括收發天線(TX&RX),射頻單元(RF)、模數轉換器 (ADC)、數字信號處理器 (DSP)、微控制器 (MCU)等。上文提到過,毫米波雷達剛誕生那會,這些器件都是分立的,后來通過CMOS工藝將RF、ADC、DSP、MCU等直接整到一顆SOC中(不同廠家SOC集成模塊數量略有差異)。
今天我們隨便拆開一個普通毫米波雷達,除了索然無味的外殼、接插件和固定裝置,尚能引起一點興趣的就是那兩塊PCB板了(有的廠家集成到一塊PCB板上),如下3D爆炸圖所示。
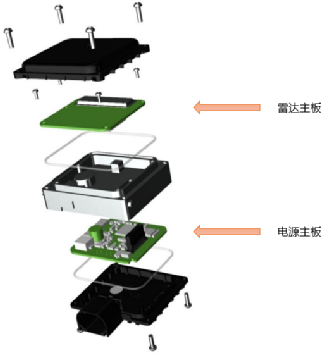
(圖片中爆炸圖來源:http://www.iotnova.com/hmbld)
電源主板上面密密麻麻豎立著電感、電容、二極管、電源芯片等,主要負責系統電源管理。各家一般還會在上面集成一顆安全控制器,提供與整車通訊及安全相關功能。
雷達主板可以說是整個毫米波雷達的核心,上面包括天線、RF、DSP和控制電路等。
(1)天線。理論和實踐證明,當天線的長度為電磁波波長的1/4時,天線的發射和接收轉換效率最高。而毫米波的波長只有幾個毫米,所以天線可以做得很小。通過使用多根天線來構成陣列天線,還能夠實現窄波束的目的,而窄波束意味著更高的方位角分辨率。
目前毫米波雷達天線的主流方案是微帶陣列,最常見的一種設計是在高頻PCB上集成“微帶貼片天線”,并將高頻PCB集成在雷達主板上。下圖展示了一個雷達主板集成天線高頻PCB板的實物,這是一個3發6收陣列天線。此種方案極大降低了毫米波雷達的成本和體積。

(圖片來源:https://www.ti.com.cn/)
(2)RF。RF負責信號調制、發射、接收以及回波信號的解調,是毫米波雷達的核心射頻部分。目前主流的方案是通過MMIC(單片微波集成電路)技術將以上內容集成。MMIC是一種用半導體工藝在半導體襯底上制造出無源和有源元器件的技術。
在毫米波雷達領域,基于鍺硅工藝的MMIC集成的功能電路主要包括低噪聲放大器、功率放大器、混頻器、檢波器、調制器、壓控振蕩器、移相器、開關等部件。發射器、接收器和DSP均作為獨立單元,這使得毫米波雷達設計過程復雜,整體體積也較為龐大。
隨著COMS工藝的發展, MMIC一方面變得更小,另一方面也為其與DSP和MCU集成提供了工藝可行性。TI在2016年底,推出基于CMOS工藝的高集成度77GHz毫米波雷達芯片AWR1642,將前端MMIC、DSP和MCU三個模塊集成在一個SOC上。顯著降低毫米波雷達成本的同時,還極大拉低了開發難度。
(3)DSP。DSP通過嵌入不同的信號處理算法,提取從前端采集得到的中頻信號,獲得特定類型的目標信息。DSP是毫米波雷達穩定性、可靠性的核心。
(4)控制電路。控制電路根據DSP輸出的目標信息,結合車身動態信息進行數據融合,最終通過主處理器進行決策處理。
三、工作體制
根據輻射電磁波方式不同,毫米波雷達主要分為脈沖波工作體制和連續波工作體制兩種類型。
脈沖波技術是指毫米波雷達在短時間內發射具有高峰值功率的短脈沖,基于多普勒頻率和TOF原理實現物體速度和距離測量,基于并列接收天線收到同一目標反射的脈沖波的相位差實現角度測量。由于功率高,因此可以在大雜波背景下,檢測出遠距離小幅度移動目標。但是也帶來了高成本、高體積、高功耗的缺點。目前車載毫米波雷達領域很少有采此種方式。
連續波技術又可以分為FSK(頻移鍵控,可測單個目標的距離和速度)、CW(恒頻連續波,只用于測速不可用于測距)和FMCW(調頻連續波)等方式。其中FMCW由于具有同時檢測多個目標、分辨率較高、成本較低等優點,因此成為連續波技術中的帶頭大哥,也順利當選所有工作方式中的武林盟主。
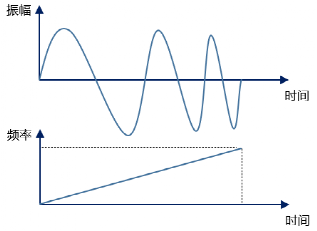
FMCW是一種頻率隨時間線性增加的Chirp波形,其振幅相對于時間、頻率相對于時間的波形如下圖所示。毫米波雷達內部合成器負責Chirp信號的生成,并以幀為單位,均勻等時間間隔的通過發射天線發出一串Chirp信號。
在毫米波雷達接收天線收到發射回來的電磁波后,會將回波信號與發射信號一同送入混頻器內進行混頻。由于發射信號在遇到被測目標并返回的這段時間內,回波信號的頻率相較發射信號已經發生了改變。而混頻器的目的就是計算出發射信號與回波信號之間頻率差,稱之為中頻信號。而這個中頻信號就包含了被測目標的距離秘密,后續再經過濾波、放大、模數轉換和測頻等處理后就可以獲得被測目標的距離信息。
對于速度測量,由于被測目標距離的不同,毫米波雷達接收到的回波信號相位也會不同。通過對一幀中所有單個chirp信號進行等間隔采樣,并將采樣點的數據進行傅里葉變換,然后利用相位差來測量被測目標的速度。
對于角度測量,利用多個接收天線接收同一個回波信號,并計算回波信號之間的相位差來實現角度測量。
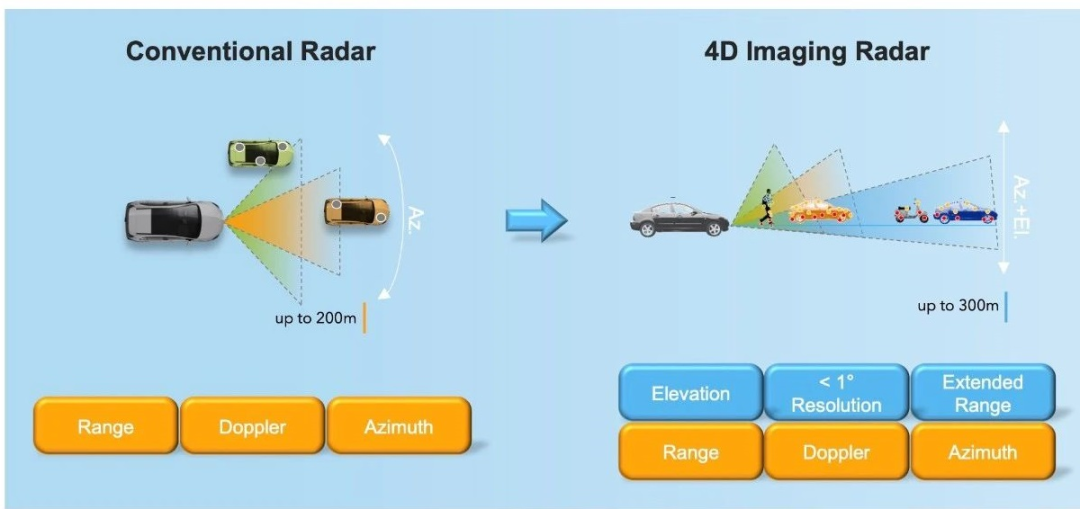
刀的重生-3D變4D
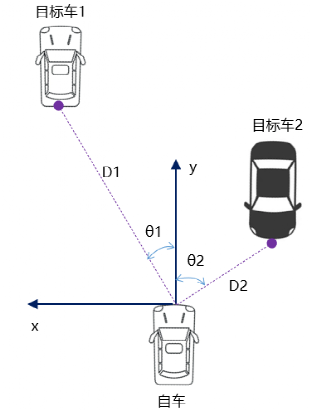
上文介紹的毫米波雷達只能輸出距離、速度和角度信息,也被稱為3D毫米波雷達。而這個距離D和角度θ是安裝雷達的自車在平面極坐標系下的數據,如下圖所示。通過將極坐標系轉換為笛卡爾坐標系,我們可以獲得目標車在x和y方向上離自車的距離。這個時候,大家是不是發現少了一個維度z方向上的距離。而這個也是3D毫米波雷達飽受詬病的缺點之一。
這個缺點對移動物體來說,還不算大問題,畢竟在道路上探測到的移動物體按常理推測應該都是在道路上正常運動的物體,這也是各廠商一貫的處理策略,從而規避了無法獲得高度這一缺陷。但是對于低空飛行的鳥,被飛吹起的輕質物體(樹葉、塑料袋等),依舊存在誤識別的問題,我想這個應該也是3D毫米波雷達處理移動物體時的Corner Case吧。
但是這個缺點對靜止物體來說,就是致命的。道路中間的井蓋,減速帶,懸在半空中的各種標識牌,限高架,靜止的車輛等,由于沒有高度信息,通過3D毫米波雷達完全無法決策這些障礙物是否影響通行。針對靜止物體,各家廠家簡單粗暴,要么直接忽略,要么極大降低置信度。這也是Tesla前期幾起事故的原因之一:攝像頭沒有識別出傾倒的白色貨車車廂,毫米波雷達識別到,但是結果在決策中置信度太低,導致車輛沒有觸發自動緊急自動功能。
由此,3D毫米波雷達這把刀便有了一個江湖的傳聞:“無法識別靜止物體”。而這個傳聞,將這把刀牢牢困在輔助駕駛的混戰時代,一直無法在自動駕駛的新戰場贏得充足的尊敬。直到在思過崖下閉關苦練十年后,領悟出一門“測高”刀法,并起名為“4D毫米波雷達”。
4D毫米波雷達增加的最顯著特性就是可以精確探測俯仰角度,從而獲取被測目標真實的高度數據,也就是目標物體在笛卡爾坐標系下z軸方向上的距離。憑借這一特性,4D毫米波雷達可以“識別靜止物體”了,最短的那塊木板補上了。除此之外,4D毫米波雷達在分辨率上也獲得極大提高。以Arbe Phoenix為例,其水平和垂直分辨率分別為1°和2°,水平分辨率比普通3D毫米波雷達提升5~10倍。
得益于俯仰角測量能力的獲得,其在垂直方向上也有了分辨率一說,而Phoenix的2°垂直分辨率僅比普通16/32線機械式激光雷達的1°垂直分辨率小一倍。這讓4D毫米波雷達在掃描同一物體時可獲掃描的點的數量極大增加,以至可以有低線束激光雷達的點云掃描效果。下面我們就來看看4D毫米波雷達是修煉了什么內功而具有俯仰角測量和提高分辨率的能力。
(1)俯仰角測量
上文角度測量原理中,我們提到需要通過多個接收天線接收同一個回波信號來計算相位差從而實現方位角的測量。而受制于成本和體積的限制,當前毫米波雷達使用的是多是單片收發器,天線要么3發4收,要么3發6收,滿打滿算也就十幾個虛擬通道。這么捉襟見肘的虛擬通道配置,全用在方位角的測量上,分辨率都不忍卒視,更別提勻出一些通道放在俯仰角的測量上了。
而要想實現俯仰角的測量,就必須增加虛擬通道的數量,最容易想到的方法就是將多個單片收發器級聯,這也是目前大部分4D毫米波雷達產品采用的方法。。但各廠商級連的方案各有不同,有追求低成本的2片級聯,有追求性價比的4片級聯,還有喜歡發燒的8/…/n級聯。毫米波雷達巨頭大陸推出的4D毫米波雷達ARS540采用的就是4片級聯的方案,將NXP的4片MMIC級聯,實現12發16收,總計達192個虛擬通道。這比其經典的3D毫米波雷達ARS408的3發6收18個虛擬通道方案,虛擬通道總數上翻了10倍多。
此種將硬件進行直接堆疊的缺點也顯而易見,成本、尺寸、功耗會同步大幅增加,工藝復雜度的提升和大量天線之間的干擾問題,也將會是廠商無法忽略的頭痛難題,再加上數據量大幅增加帶來的處理芯片性能要求的提高,怎么看都覺得此種方案不是這把刀最終的樣子。
與硬件堆疊相對應的是單純依靠AI算法增加虛擬通道數,此方案的代表廠商是傲酷。其在一篇宣傳文案中這樣寫道:傲酷靠AI軟件創造出極多虛擬天線的方式徹底解決了困擾車載毫米波雷達界幾十年的只能用增加實體天線數量提高角分辨率的世界難題,用軟件重新定義了雷達。同時4D成像雷達產品的BOM成本和普通毫米波雷達基本相似,但其性能卻是碾壓式的優異。筆者愚笨,不懂AI算法,也沒法對這一技術方案妄加評論,只能安慰自己,讓子彈飛一會。
而部分芯片巨頭已經開始自主研發多通道陣列射頻芯片組、雷達處理器芯片和基于人工智能的后處理軟件算法。集成化、芯片化、定制算法,這個聞起來有點技術革新的味道了,可能也是4D毫米波雷達該有的終極樣子。
(2)分辨率提高
分辨率直接和虛擬通道的數量成正比,上文已介紹過虛擬通道的增加方案,此處不再贅述。Arbe的4D毫米波雷達Phoenix分辨率為1°x2°,速騰的16線激光雷達分辨率為0.2°x2°,垂直分辨率一致,水平分辨率相差5倍,努努力從分辨率方面確實有取代低線束激光雷達的能力,但現在凡是有點自尊的自動駕駛公司,誰還在用16線激光雷達呢。說16線激光雷達快在自動駕駛領域淘汰,似乎也不是太過分。
速騰的混合固態激光雷達(主機廠的座上賓,當紅小生),分辨率為0.2°x0.2°,這一分辨率作為自動駕駛主激光,部分自動駕駛公司還在抱怨不夠用,再回頭看看4D毫米波雷達的分辨率,不知道4D毫米波雷達這個“成像”是怎么叫出口的。
刀的款式-各家主流產品參數
根據公開信息,總結幾款4D毫米波雷達產品信息如下圖所示,最新性能參數以各家網站最新公布為準。同時據高工智能汽車預測,4D成像雷達將在2022年初開始小規模前裝導入,預計到2023年,搭載量有機會突破百萬顆,到2025年占全部前向毫米波雷達的比重有望超過40%。

全文小結
國內把3D毫米波雷達吃透和用好的主機廠和Tier1不多,再加上一維信息的測量,國內廠商就有信心不被國外巨頭牽著鼻子走?為了與眾不同,以便在市場宣傳時打出“全球首款”、“市場首家”的口號,最終還不都是被國外巨頭割了韭菜,交了智商稅。但國內盛產的偏偏又是韭菜,被誰割還不是割呢!
編輯:黃飛
?













 工商網監
工商網監
評論