中國,北京 – Analog Devices, Inc. (ADI)宣布推出首款用于3D景深測量和視覺系統(tǒng)的高分辨率、工業(yè)品質(zhì)、間接飛行時(shí)間(iToF)模塊。全新ADTF3175模塊使攝像頭和傳感器
2022-06-28 10:35:22 1320
1320 
3D OM (3D Optical Microscope)原理是藉由一般可見光對物體表面之反射特性,透過光學(xué)的透鏡放大、縮小及CCD來擷取影像,可進(jìn)行表面形貌的觀察與尺寸的分析量測。3D OM
2019-01-11 14:57:03
隨著數(shù)字成像技術(shù)的發(fā)展,相機(jī)作為一種傳感器被廣泛研究。在過去一年多的時(shí)間中,ToF技術(shù)作為拍照的亮點(diǎn)頻頻出現(xiàn)在各家的手機(jī)產(chǎn)品上。從vivo NEX到榮耀V20,從景深測量到動作捕捉,有了ToF技術(shù)
2019-08-01 07:00:50
隨著數(shù)字成像技術(shù)的發(fā)展,相機(jī)作為一種傳感器被廣泛研究。在過去一年多的時(shí)間中,ToF技術(shù)作為拍照的亮點(diǎn)頻頻出現(xiàn)在各家的手機(jī)產(chǎn)品上。從vivo NEX到榮耀V20,從景深測量到動作捕捉,有了ToF技術(shù)
2020-08-06 06:27:26
一文讀懂什么是NEC協(xié)議?
2021-10-15 09:22:14
。只需把工件放置載物臺,然后輕輕按一鍵,工件所有尺寸瞬間完成。 產(chǎn)品特點(diǎn):1.大視野整體成像,按一鍵完成所有測量任務(wù)。2. 無需夾具定位工件,可任意擺放。3. 一次可同時(shí)測量多個(gè)工件。4. 超大景深,無需
2017-06-29 15:29:20
工件放置載物臺,然后輕輕按一鍵,工件所有尺寸瞬間完成。 產(chǎn)品特點(diǎn):1.大視野整體成像,按一鍵完成所有測量任務(wù)。2. 無需夾具定位工件,可任意擺放。3. 一次可同時(shí)測量多個(gè)工件。4. 超大景深,無需調(diào)焦
2017-06-29 15:12:38
上篇博文寫了一些有關(guān)CMOS門電路的基礎(chǔ)內(nèi)容,相信認(rèn)真看完,一定能畫出各種CMOS門電路:CMOS門電路,這些是最常考的基礎(chǔ)內(nèi)容。下面簡單介紹一下其他概念題目:1、 解釋一下Vih,Vil,Vol
2021-07-28 06:23:10
離上次更新這個(gè)3399的試用帖子更新過去好久了,拿了這個(gè)板子真是慚愧。一方面公司項(xiàng)目太多,另外這個(gè)板子不知啥原因刷進(jìn)去的系統(tǒng)不能用了,很多代碼要重新寫,不過最近依然在關(guān)注和也就景深相機(jī)方面的東西
2017-11-12 21:37:42
本帖最后由 IC爬蟲 于 2017-9-18 11:45 編輯
雙面景深視覺系統(tǒng)和單片視覺視覺系統(tǒng)很有大的區(qū)別,單片視覺系統(tǒng)無法得到精確的距離信息,就像人一下樣如果使用一只眼睛看物體的話將失去
2017-09-17 17:56:27
目前景深相機(jī)有很多已經(jīng)成熟案例,技術(shù)實(shí)現(xiàn)方式只要有:TOF,雙攝像頭的視差,結(jié)構(gòu)光案例1:微軟的kinect,這款產(chǎn)品開始只是作為XBOX的配件,目前已經(jīng)更新迭代了兩個(gè)版本,最新的版本使用的就是
2017-09-04 20:41:45
項(xiàng)目名稱:基于雙目攝像頭的視覺景深算法開發(fā)試用計(jì)劃:1.在這個(gè)試用活動剛開始的時(shí)候我就申請了,但是很遺憾沒有通過。由于工作的原因我在今年開發(fā)了一套本來打算用于VR設(shè)備設(shè)備的雙目手勢識別硬件
2017-08-21 12:42:45
`折騰了一個(gè)新年,總算勉強(qiáng)有點(diǎn)效果了,這個(gè)任務(wù)真是大坑啊,關(guān)鍵的識別部分沒多大難度,但上位機(jī)、下位機(jī)、機(jī)械結(jié)構(gòu)接連出問題。弄了個(gè)雙目搞景深,一次性全部識別出來,不過這廣角攝像頭忒麻煩了,攝像頭線下
2020-02-08 18:13:01
?簡介:本文將通過介紹如何實(shí)現(xiàn)屏和App實(shí)時(shí)顯示溫濕度和光照度采集數(shù)據(jù),以及通過控制屏和App去控制GPIO口電平翻轉(zhuǎn)來帶大家了解STM32和迪文串口屏以及Wi-Fi模組進(jìn)行數(shù)據(jù)交互。程序下載路徑:demo程序。一.迪文屏簡介顯示控制部分采用的是迪文的4.3寸串口屏。正面圖:?
2022-02-14 07:38:06
nm。所以不是一次對焦就完成了,在晶圓曝光的過程中,每個(gè)單元影像曝光不到0.15秒,在這極短的時(shí)間內(nèi),晶圓平臺仍須及時(shí)的調(diào)整高度,以確保光阻區(qū)不落到景深之外,而這高度的調(diào)整完全是納米等級的。這全靠ASML精準(zhǔn)量測及精密控制的完美集成。
2020-09-02 17:38:07
` 在精密光學(xué)測量系統(tǒng)中,由于普通光學(xué)鏡頭會存在一定的制約因素,如影像的變形、視角選擇而造成的誤差、不適當(dāng)光源干擾下造成邊界的不確定性等問題,進(jìn)而影響測量的精度。而遠(yuǎn)心鏡頭(Telecentric
2018-09-28 09:14:02
。這一問題在某些應(yīng)用場合是可以被忽略甚至加以利用的,但是當(dāng)我們的視覺系統(tǒng)被用來執(zhí)行精密測量任務(wù)時(shí),這一特性則會成為極大的阻礙。第二個(gè)問題,普通的鏡頭都存在一定范圍的景深,當(dāng)被測物體不在鏡頭的景深范圍內(nèi)
2016-01-12 13:32:48
工件放置載物臺,然后輕輕按一鍵,工件所有尺寸瞬間完成。 產(chǎn)品特點(diǎn):1.大視野整體成像,按一鍵完成所有測量任務(wù)。2. 無需夾具定位工件,可任意擺放。3. 一次可同時(shí)測量多個(gè)工件。4. 超大景深,無需調(diào)焦
2017-06-29 15:28:10
感謝分布式資本提供研究支持,以及摩聯(lián)科技等代表性企業(yè)的交流分享。基于區(qū)塊鏈的物聯(lián)網(wǎng)市場前景:萬物互聯(lián)時(shí)代,數(shù)據(jù)價(jià)值越發(fā)重要,物聯(lián)網(wǎng)+區(qū)塊鏈的融合創(chuàng)新將成為新的行業(yè)趨勢。當(dāng)前物聯(lián)網(wǎng)模組廠商都在快速鋪量
2021-07-22 06:25:23
通用電磁兼容標(biāo)準(zhǔn)(EMC Standard)對照表目的,給予電源及相關(guān)電行業(yè)開發(fā)或測試人員參考,查找或引用更加方便。包括傳導(dǎo)、輻射以及諧波。下面對常見的一些標(biāo)準(zhǔn)做一些對應(yīng)解釋,特別是針對在通用
2021-10-29 08:33:40
~20,000倍,介于光學(xué)顯微鏡和透射電鏡之間,即掃描電鏡彌補(bǔ)了光學(xué)顯微鏡和透射電鏡放大倍數(shù)的空擋。景深 景深是指焦點(diǎn)前后的一個(gè)距離范圍,該范圍內(nèi)所有物點(diǎn)所成的圖像符合分辨率要求,可以成清晰的圖像;也即,景深
2019-07-26 16:54:28
條狀方形盒內(nèi),不需要另外3 軟件設(shè)計(jì)的光學(xué)附件,沒有調(diào)整光路和景深等問題,具有結(jié)構(gòu)簡單、體積小、應(yīng)用方便等優(yōu)點(diǎn)。在一些應(yīng)用場合 CIS傳感器比 CCD或 COMS等傳感器有無法比擬的優(yōu)點(diǎn)。在傳真機(jī)、掃描儀、紙幣清分兌零等領(lǐng)域應(yīng)用非常廣泛。
2019-09-04 06:49:04
的F number 較小,而影像會較為明亮, 當(dāng)光圈合上時(shí)光圈值的F number 較大,而影像較暗。 另外調(diào)整光圈也會影響曝光量以及景深遠(yuǎn)近。- AOI所謂的AOI (Automated
2015-10-12 09:32:20
。解析度通常被模塊轉(zhuǎn)換功能(MTF)以圖像的方式顯示出來。距離約束所謂的工作距離,是指當(dāng)圖像在焦距范圍內(nèi)的時(shí)候,物體和照相機(jī)鏡頭前端的距離。它限制了視覺系統(tǒng)以及和視覺系統(tǒng)一起工作的設(shè)備所需要的空間。在
2012-10-22 15:57:59
就解釋仿真圖中第二張的意思,以及第三張中模數(shù)轉(zhuǎn)換時(shí)為什么振幅突然變大了
2016-01-03 21:24:14
鏡頭,在分辨率、明銳度、景深等方面都有很好的體現(xiàn),對各種像差的校正也比較好,但同時(shí)其價(jià)格也會幾倍甚至上百倍的提高。如果掌握一些規(guī)律和經(jīng)驗(yàn),在組建系統(tǒng)選購鏡頭時(shí)就會避免一些損失,使系統(tǒng)達(dá)到更好的效果。北京
2014-06-24 14:21:20
深度融合模型的特點(diǎn),背景深度學(xué)習(xí)模型在訓(xùn)練完成之后,部署并應(yīng)用在生產(chǎn)環(huán)境的這一步至關(guān)重要,畢竟訓(xùn)練出來的模型不能只接受一些公開數(shù)據(jù)集和榜單的檢驗(yàn),還需要在真正的業(yè)務(wù)場景下創(chuàng)造價(jià)值,不能只是為了PR而
2021-07-16 06:08:20
鏡頭是機(jī)器視覺系統(tǒng)中的重要組件,對視覺檢測的成像質(zhì)量起著關(guān)鍵性的作用。其主要參數(shù)包括:焦距、光圈系數(shù)、視場、工作距離、景深等。下面四元數(shù)數(shù)控就來介紹一些機(jī)器視覺系統(tǒng)的主要參數(shù)。焦距(視場角)不僅僅
2021-05-26 10:33:08
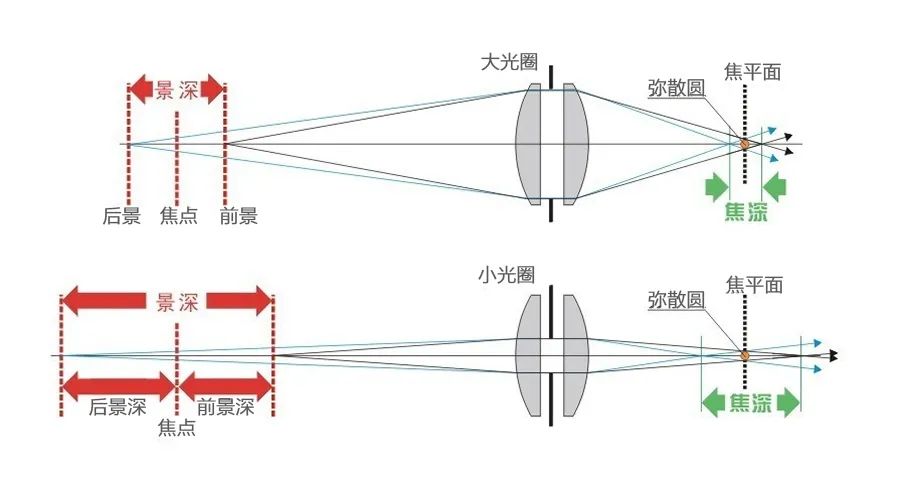
(景深)在聚焦范圍內(nèi)的距離稱之為景深(Depth of Field), 通常在景深范圍內(nèi)的物件不論前后都可以清楚聚焦呈現(xiàn)清晰的影像。一般而言當(dāng)光圈F 值較小時(shí)景深是較短的, 相反的若是光圈F 值較大時(shí)則
2015-11-02 15:32:11
所謂的魚眼鏡頭(Fish-eye Lens) 其實(shí)是一種超廣角鏡頭, 它可以提 供超過100 度甚至到180 度的視角, 其幾乎是無限景深且無需聚焦。 這種鏡頭由于其本身的外緣變形特性因此十分適合
2015-11-04 09:50:38
誰能解釋下S1以及S2的作用PCB打樣找華強(qiáng) http://www.hqpcb.com 樣板2天出貨
2013-02-22 16:35:51
3D 點(diǎn)云。高度差異化 3D 機(jī)器視覺系統(tǒng)利用 DLP?(...)主要特色 集成型 API 和針對 DLP 芯片組的驅(qū)動程序支持,可實(shí)現(xiàn)快速以及可編程圖形針對同步捕捉的集成型攝像機(jī)支持投影儀和攝像機(jī)校準(zhǔn)例程用于生成視差圖、景深圖和點(diǎn)云的結(jié)構(gòu)光算法API 文檔應(yīng)用和源代碼的完全訪問權(quán)限
2018-10-12 15:33:03
構(gòu)建精細(xì)的 3D 點(diǎn)云。作為緊湊或手持解決方案的理想之選,此高分辨率 3D 掃描儀系統(tǒng)利用 DLP?(...)主要特色針對 DLP 芯片組的集成型 API 和驅(qū)動程序支持,可實(shí)現(xiàn)快速以及可編程圖形集成型攝像頭支持,實(shí)現(xiàn)同步捕捉投影儀和攝像頭校準(zhǔn)例程用于生成視差圖、景深圖和點(diǎn)云的結(jié)構(gòu)化照明算法
2018-09-18 08:38:28
工件放置載物臺,然后輕輕按一鍵,工件所有尺寸瞬間完成。 產(chǎn)品特點(diǎn):1.大視野整體成像,按一鍵完成所有測量任務(wù)。2. 無需夾具定位工件,可任意擺放。3. 一次可同時(shí)測量多個(gè)工件。4. 超大景深,無需調(diào)焦
2017-06-29 15:14:10
3D OM (3D Optical Microscope)原理是藉由一般可見光對物體表面之反射特性,透過光學(xué)的透鏡放大、縮小及CCD來擷取影像,可進(jìn)行表面形貌的觀察與尺寸的分析量測。3D OM
2018-08-21 10:40:07
應(yīng)用的高分辨率精確圖形。特性集成型 API 和針對 DLP 芯片組的驅(qū)動程序支持,可實(shí)現(xiàn)快速以及可編程圖形針對同步捕捉的集成型攝像機(jī)支持投影儀和攝像機(jī)校準(zhǔn)例程用于生成視差圖、景深圖和點(diǎn)云的結(jié)構(gòu)光算法API 文檔應(yīng)用和源代碼的完全訪問權(quán)限
2022-09-22 10:20:04
中圖圖像尺寸測量儀整個(gè)系統(tǒng)由光源、鏡頭、圖像采集卡、相機(jī)、圖像處理軟件等組件構(gòu)成。其中遠(yuǎn)心鏡頭可以稱之為儀器的“眼睛",是系統(tǒng)的核心組件之一。遠(yuǎn)心鏡頭具有高景深的特性,一旦物體超過鏡頭的景深范圍
2022-05-23 17:05:47
,而景深所反映的就是鏡頭對焦后,物體能清楚成像的距離范圍。一旦物體超過鏡頭的景深范圍,圖像就會變得模糊,高景深就可以在觀測具有厚度的物體時(shí)仍能有好的清晰度。&nb
2022-05-25 14:02:32
美國ALLEGRO文丘里風(fēng)機(jī),氣動風(fēng)機(jī),氣動通風(fēng)機(jī),文丘里風(fēng)機(jī)應(yīng)用于:煉油廠、發(fā)電廠、造船廠、造紙和紙漿廠、海洋艦船、鋼鐵工業(yè)以及人孔(沙井)的通風(fēng)換氣。文丘里風(fēng)機(jī)特別適用于有毒煙霧
2022-10-18 16:30:36
中圖儀器推出的SuperViewW1白光干涉儀品牌超景深三維光學(xué)顯微鏡,幾何分析、粗糙度分析、結(jié)構(gòu)分析、頻率分析、功能分析五大功能模塊齊全,結(jié)合自定義分析模板的自動化測量功能,可自動完成多區(qū)域的測量
2023-03-13 14:32:45
中圖儀器VT6000超景深光學(xué)顯微鏡與共聚焦材料表面微納米級測量儀以轉(zhuǎn)盤共聚焦光學(xué)系統(tǒng)為基礎(chǔ),結(jié)合高穩(wěn)定性結(jié)構(gòu)設(shè)計(jì)和3D重建算法,共同組成測量系統(tǒng),保證儀器的高測量精度;隔震設(shè)計(jì)能夠消減底面振動噪聲
2023-04-04 11:04:53
產(chǎn)品說明:使用360全景式顯微鏡獲取更大景深,全方位觀
2010-11-29 16:10:18 18
18 三星今天向美國專利和商標(biāo)局遞交了有關(guān)雙鏡頭淺景深相機(jī)技術(shù)的專利文本,目前這種代價(jià)昂貴的技術(shù)何時(shí)商用還有待觀察。
2011-07-20 08:48:32733 
iPhone 7 Plus最大的特色之一就是雙攝像頭以及可以拍攝不同景深照片的“人像模式”,不過目前來看,少部分iPhone 7 Plus用戶的雙攝像頭還是出現(xiàn)了“失效”問題
2016-12-23 11:15:561427 PrimeSense為微軟Kinect開發(fā)的景深感應(yīng)技術(shù)雖然對于電子游戲貢獻(xiàn)不多,但卻讓機(jī)器人和3D掃描獲得了巨大的技術(shù)進(jìn)步。目前市面上有多款攝像頭都使用了PrimeSense的技術(shù),但問題是,這家公司已經(jīng)不復(fù)存在了:蘋果已經(jīng)在2013年收購了PrimeSense。
2017-04-28 10:17:042621 光場顯示技術(shù):產(chǎn)生真實(shí)的景深信息,更接近現(xiàn)實(shí)的觀看體驗(yàn)光場為何物,百度百科是這樣解釋的:指光在每一個(gè)方向通過每一個(gè)點(diǎn)的光量,自由空間中某一點(diǎn)沿著一定方向的光線輻射度值,該空間所 有的有向光線集就構(gòu)成
2017-09-14 10:27:3311 電子發(fā)燒友網(wǎng)站提供《美圖軟件背景虛化景深效果詳細(xì)教程.docx》資料免費(fèi)下載
2017-09-25 14:47:130 ZED Mini能夠安裝在兩款頭顯底部的底座,其兩個(gè)攝像頭之間采取了人眼瞳距平均值的65mm,以適配各種人的佩戴要求。雙攝像頭共同協(xié)作,可以記錄不同角度的景深信息,以構(gòu)建場景的景深圖。系統(tǒng)最終能夠提供720p分辨率、60fps性能、3A級別圖形。
2017-12-07 11:51:037105 魅藍(lán)Note 6是魅藍(lán)在2017年8月23日推出的千元機(jī),它最大的亮點(diǎn)是拍照。 魅藍(lán)Note 6采用主攝像頭+景深鏡頭的雙彩色方案,主攝像頭為1200萬像素,副攝像頭為500萬像素,后者用于紀(jì)錄物體之間的景深信息。
2018-08-05 11:27:004023 3月16日消息下午,小米在北京召開發(fā)布會,正式發(fā)布了千元機(jī)全面屏新品紅米Note5。 據(jù)小米總裁林斌介紹,紅米Note5主打AI雙攝。在攝像頭方面由一顆1200萬像素主攝像頭以及一顆500萬像素景深
2018-03-24 07:49:001663 HFSS有FEM、IE(MoM)、DGTD、PO、SBR+等算法,本文會針對每種算法和應(yīng)用場景逐一介紹,相信你看完這篇文章應(yīng)該對HFSS算法和應(yīng)用場景會有更深的認(rèn)識。
2018-04-25 11:45:047963 
設(shè)備制造商現(xiàn)在可以利用Lucid的核心軟件解決方案,在簡單的雙攝像頭設(shè)備上實(shí)現(xiàn)仿人類視覺的高精度3D景深識別。
2018-07-27 17:18:077129 圖形學(xué)離線渲染中常用的透視攝像機(jī)模型時(shí)根據(jù)小孔成像的原理建立的,其實(shí)現(xiàn)通常是從eye 向成像平面上發(fā)射ray,并把trace這條ray的結(jié)果作為成像平面上對應(yīng)交點(diǎn)的采樣結(jié)果。
2018-08-04 11:31:123327 
更新1.5中添加的一些新功能包括新的錐形模式,使用戶能夠繪制任意長度的筆劃并始終具有錐形末端。“使用法線繪制”選項(xiàng)可以看到非圓形筆觸更好地匹配控制器的旋轉(zhuǎn)以及現(xiàn)在自由編輯筆劃法線。此外,更新中還添加了許多新的導(dǎo)出選項(xiàng)和景深效果。這些都顯示在下面的視頻中,但也有很多其他的進(jìn)一步改善了用戶體驗(yàn)和工作流程。
2018-09-12 08:33:1219286 基于MEMS微振鏡的3D成像精度可達(dá)到亞毫米級精度,最優(yōu)實(shí)現(xiàn)0.2毫米。同時(shí)基于MEMS微振鏡可實(shí)現(xiàn)無焦的結(jié)構(gòu)光投射,實(shí)現(xiàn)大景深探測。
2018-10-04 14:16:0020080 12.1中被取消,主要是他們用不慣,同時(shí)新系統(tǒng)中還會加入全新的實(shí)時(shí)景深控制功能,使用人像模式拍照時(shí),可以即時(shí)調(diào)整景深。
2018-11-19 19:15:574317 iPhone XS 全新推出的景深控制,只需簡單滑動就可實(shí)現(xiàn),不用再調(diào)節(jié)具體參數(shù),就可以拍出想要的景深效果。這一效果也體現(xiàn)在賈樟柯導(dǎo)演的《一個(gè)桶》中,兒子攜帶一個(gè)桶登上公交車時(shí)的一個(gè)固定鏡頭,就體現(xiàn)了十分自然的淺景深效果。
2019-01-28 09:59:00769 將 PDAF 作為輸入并進(jìn)行景深預(yù)測。這種新式改進(jìn)的基于機(jī)器學(xué)習(xí)的景深捕捉方法被應(yīng)用在了 Pixel3 的人像模式中。
2018-12-03 10:32:524700 展銳的測試主要是結(jié)合DXO測試進(jìn)行的,我們在實(shí)驗(yàn)室利用DXO的測試場景,從得出的結(jié)果來計(jì)算散景問題。另一方面我們從自己搭建的實(shí)驗(yàn)室對景深做光圈、分離等驗(yàn)證測試,如下圖四是實(shí)驗(yàn)室場景一角,如圖五為拍攝規(guī)范:
2018-12-05 17:09:058463 拍照方面,此次華為在nova 4的拍照上下足了功夫,后置攝像頭主攝為4800萬像素的IMX586+1600萬超廣角+200萬像素的景深攝像頭,標(biāo)準(zhǔn)版的主攝為2000萬像素+1600萬超廣角+200萬像素的景深攝像頭。前置攝像頭為2500萬像素,海報(bào)級自拍。
2018-12-20 08:30:442129 隨著AR的不斷發(fā)展,視場與深度感是在真實(shí)環(huán)境中渲染可信虛擬對象的最為關(guān)鍵因素之一。對于這一點(diǎn),日本筑波大學(xué)的研究人員日前提出了一種針對大eye-box,全視差和景深的近眼AR顯示器設(shè)計(jì)與渲染方法。
2018-12-21 16:37:352713 萬索尼獨(dú)家定制景深攝像頭,一鍵實(shí)現(xiàn)虛化拍攝,創(chuàng)建景深效果,大幅提升夜景拍攝降噪和畫質(zhì)表現(xiàn)。M2的4+64GB版本價(jià)格為2699元。
2019-03-06 09:55:5014055 
手機(jī)雙攝方案有很多種,常見的有黑白+彩色、廣角+長焦、普通+景深等等,最近華碩又為我們提供了一種新的雙攝思路——普通+闊景。
2019-02-28 08:56:482165 三星S105G相當(dāng)于S10+的增強(qiáng)版本。配置三星S105G版上搭載驍龍855,后置水平四攝像頭,新增3DToF;正面為6.7英寸雙曲面屏幕,雖然右上角也是雙攝,但與S10Plus不同的是RGB景深
2019-04-15 16:43:519319 Granit 1280i采用全景深二維影像技術(shù),可以對遠(yuǎn)達(dá)54英尺(16.5米)的條形碼進(jìn)行掃描。不僅如此,它還可以掃描打印質(zhì)量差的7.5mil紙質(zhì)條碼、100mil反光條碼 以及介于兩者之間的所有條碼。
2019-10-17 11:15:211956 Granit 1981i采用全景深二維影像技術(shù),可識讀15cm(6")到15m(50')范圍內(nèi)的一維和二維條形碼。從一臂之遙的低質(zhì)量7.5mil紙質(zhì)碼,到懸在倉庫椽梁上的100mil的反光碼,都可以被Granit 1981i“盡收眼底”。
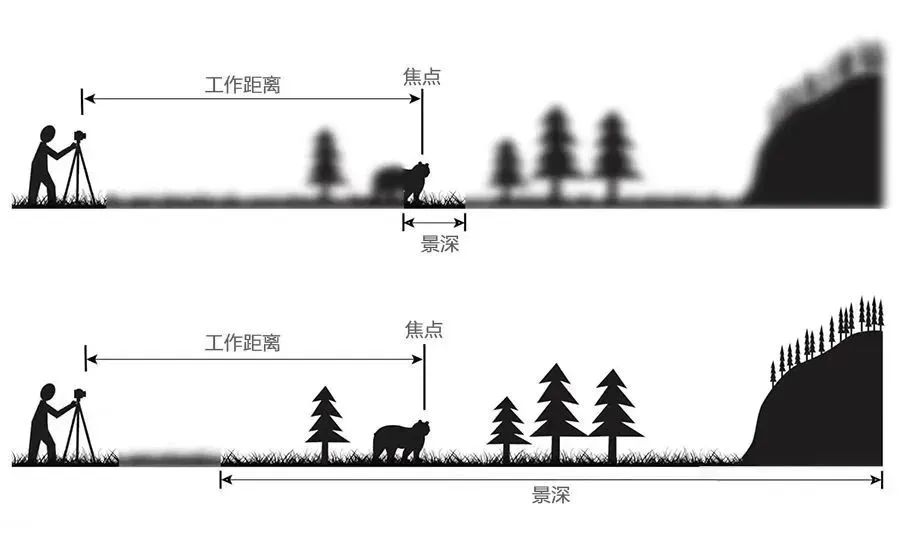
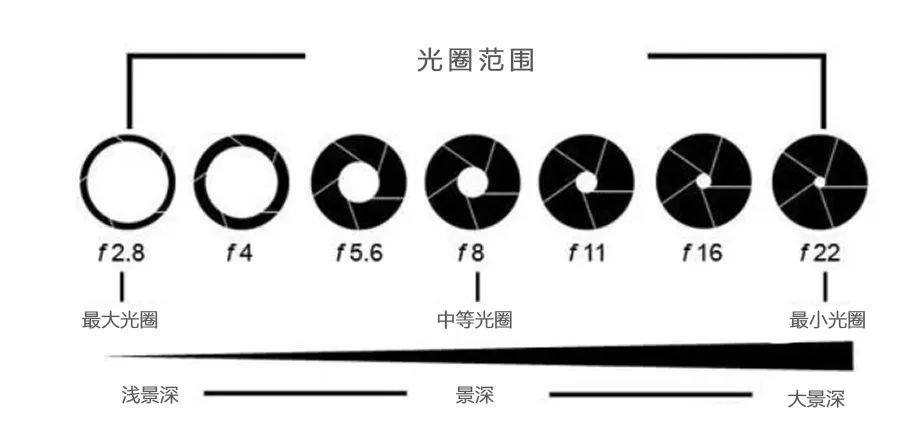
2019-10-17 14:10:002842 所謂景深,就是當(dāng)焦距對準(zhǔn)某一點(diǎn)時(shí),其前后都仍可清晰的范圍。它能決定是把背景模糊化來突出拍攝對象,還是拍出清晰的背景。簡單來說,景深小可以拍出背景虛化的照片,景深大可以拍出清晰的背景。而光圈跟景深的關(guān)系是,光圈越大景深越小,光圈越小景深越大。
2019-08-25 10:36:027417 遠(yuǎn)處視力表的位置距離大約為13米,可以看到整體畫面比較清晰。那么如此對焦,景深是不是可以達(dá)到無窮遠(yuǎn)呢?我們將在室內(nèi)按照13米距離對好焦的攝像機(jī)對著室外現(xiàn)場抓。
2019-08-26 17:34:018701 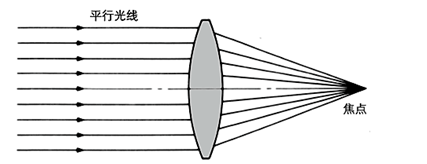
拍照方面,酷派26臻藏版后置三攝,主攝像頭為1600萬像素,F(xiàn)1.8的大光圈。另有一顆800萬像素長焦攝像頭以及一顆500萬像素景深攝像頭。前置1600萬像素自拍攝像頭,支持自拍美顏。
2019-09-20 14:05:441515 可以在理想像面成清晰像。本文對這一問題進(jìn)行了研究, 結(jié)合理想光學(xué)系統(tǒng)的成像模型、景深模型、以及視覺檢測系統(tǒng)的相機(jī)參數(shù)等, 對視覺檢測系統(tǒng)中相機(jī)的景深問題進(jìn)行了數(shù)學(xué)模型的建立, 并通過實(shí)驗(yàn)驗(yàn)證了模型的有效性。模型的建立
2019-10-15 11:56:556 Intel? RealSense? SR300 系列實(shí)感攝像頭,采用英特爾RealSense? F200技術(shù),這是世界上第一個(gè),也是最小的一個(gè)集成3D景深和2D相機(jī)的模組:將景深感測與1080p
2020-01-03 09:45:092651 
紅米K30采用了6400萬前后六攝的設(shè)計(jì),首先來說前置,它搭載了一顆2000萬像素的自拍鏡頭,同時(shí)還加入了一顆獨(dú)立景深鏡頭,從而為自拍帶來更好的虛化效果;后置則是搭載了一顆6400萬像素主攝+一顆2cm超級微距鏡頭+一顆120°超廣角鏡頭+一顆獨(dú)立景深鏡頭,從而帶來全場景級的拍照體驗(yàn)。
2019-12-06 16:24:555835 研究了液晶透鏡的瞬態(tài)特性。結(jié)果表明,LC透鏡在正、負(fù)透鏡狀態(tài)之間切換時(shí),保持了其透鏡特性。其光功率由正變?yōu)樨?fù),均方根像差也隨時(shí)間變化,但始終保持在0.1波長以下。利用LC透鏡的這種瞬態(tài)特性,獲得了擴(kuò)展景深的圖像。
2020-05-18 08:00:0018 研究方向:擴(kuò)展景深成像 實(shí)驗(yàn)內(nèi)容:利用液晶透鏡在正負(fù)狀態(tài)轉(zhuǎn)換時(shí)仍然保持透鏡狀態(tài)這一特性,實(shí)現(xiàn)擴(kuò)展景深成像。 測試目的:測試正負(fù)轉(zhuǎn)換過程中,液晶透鏡的光焦度及像差隨時(shí)間的變化,確認(rèn)其保持透鏡特性
2020-06-20 11:34:31710 物體和鏡頭之間間隔(W.D)雖然改變,介在前后必定規(guī)模內(nèi)所成像依然感受明晰,這個(gè)間隔規(guī)模補(bǔ)稱為景深。相反的,對應(yīng)于斷定的物平面,成像面和鏡頭之間的間隔不一樣,但在必定的規(guī)模內(nèi)圖畫仍感受明晰,稱為焦深。
2020-08-28 11:37:434282 隨著Mini 背光市場的玩家的陸續(xù)進(jìn)場,LED封裝廠商、面板廠商和電視廠商對于Mini 背光的市場前景深信不疑,但對于Mini背光的基板選擇卻各有心思。PCB、FPC和玻璃基板都有不同的支持者
2020-09-14 12:04:312043 后置三攝選擇了4800萬像素主攝+200萬像素微距+800萬像素超廣角/景深組合。
2020-09-18 14:59:175284 該文是商湯研究院、南京科技以及哈工大聯(lián)合提出的一種采用動態(tài)濾波器卷積進(jìn)行視頻去模糊的方法。由于相機(jī)抖動、目標(biāo)運(yùn)動以及景深變化會...
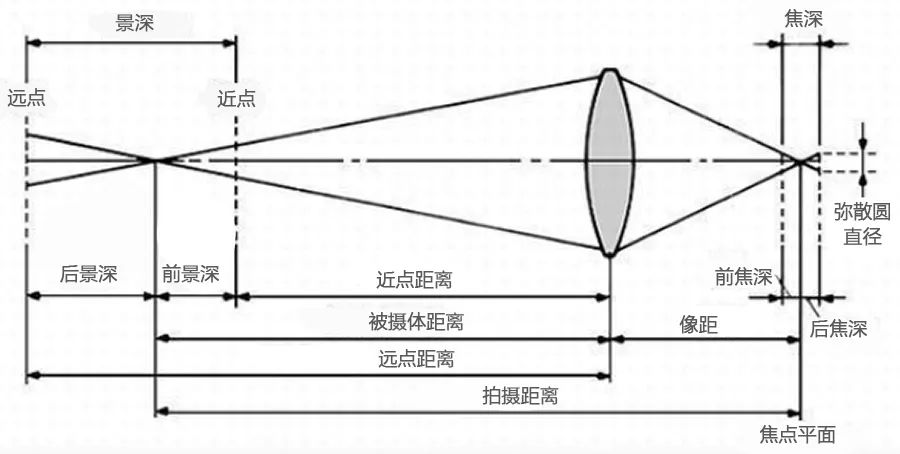
2020-12-10 20:22:29433 攝影機(jī)鏡頭或其他成像器前沿能夠取得清晰圖像的成像所測定的被攝物體前后距離范圍。通俗講即被拍攝物體對焦點(diǎn)平面處的景物,在膠片上會形成清晰影像,在對焦點(diǎn)平面的前方某處到其后方某處有一個(gè)范圍,其內(nèi)的景物都能形成清晰影像,這一范圍稱為景深,討論景深,一般我們用“深淺”形容,即淺景深或大景深。
2021-04-14 14:27:3911481 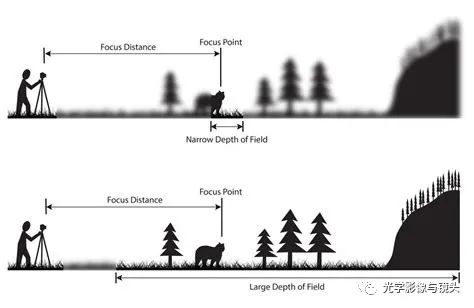
1.1【環(huán)境】快速安裝 Python 解釋器 Python 是一門解釋性腳本語言,因此要想讓你編寫的代碼得以運(yùn)行,需要先安裝 CPython 解釋器。 根據(jù)你電腦的系統(tǒng)以及位數(shù)不同,安裝步驟也有
2022-02-15 16:57:541901 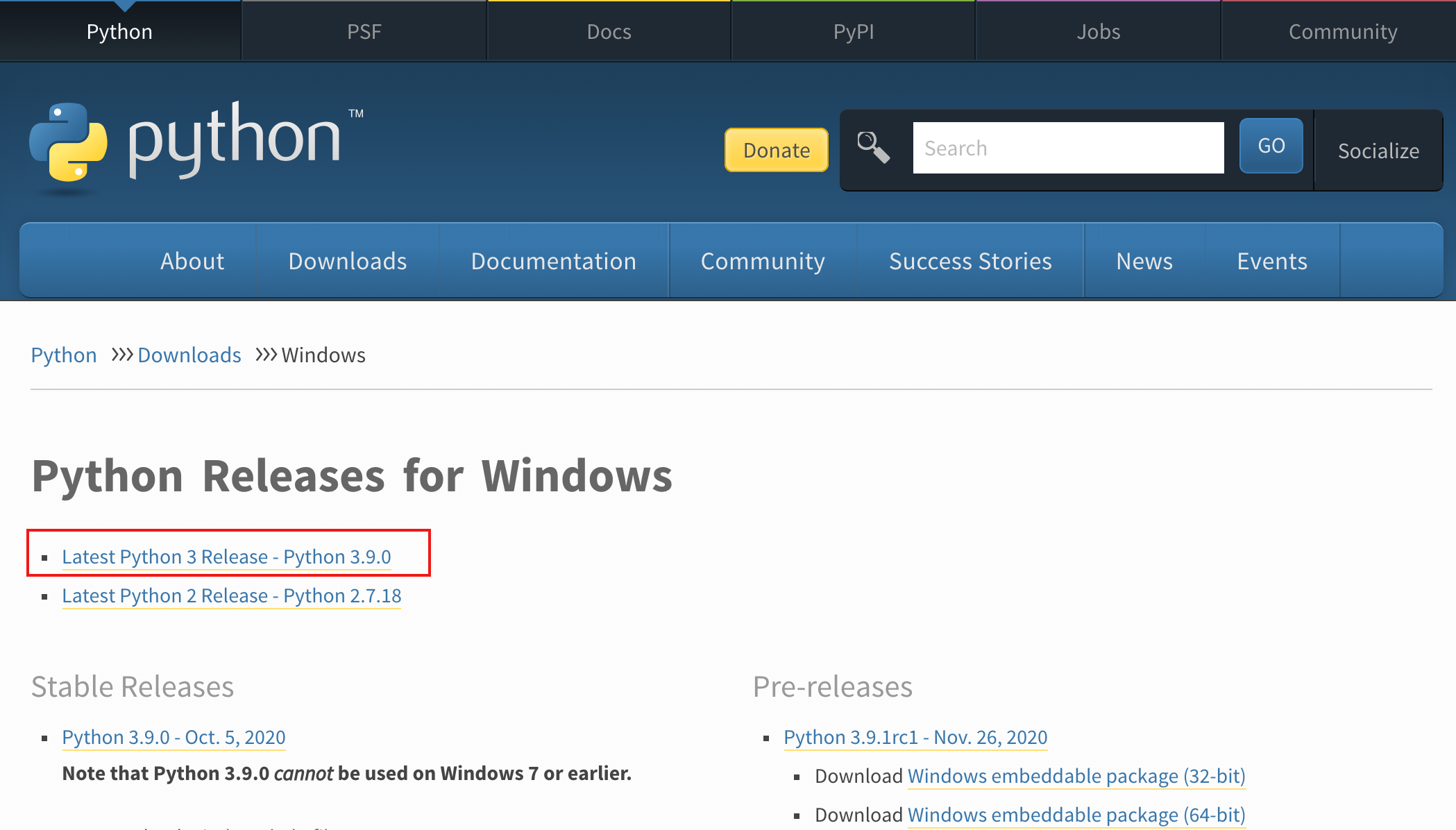
中國,北京– Analog Devices, Inc. (ADI)宣布推出首款用于3D景深測量和視覺系統(tǒng)的高分辨率、工業(yè)品質(zhì)、間接飛行時(shí)間(iToF)模塊。全新ADTF3175模塊使攝像頭和傳感器
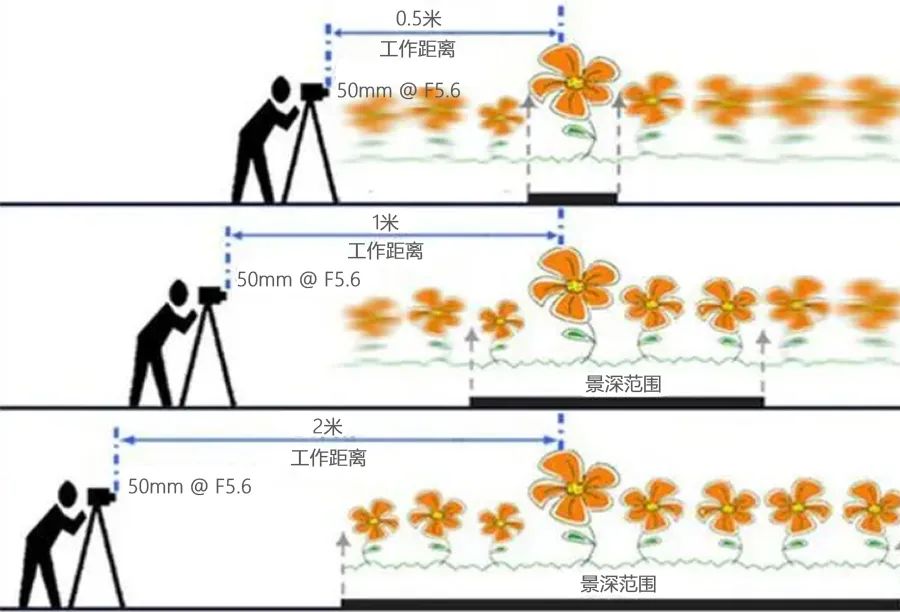
2022-07-06 16:20:031028 有三個(gè)因素會影響景深的范圍:光圈大小、對焦距離以及鏡頭焦距 有一些因素相比之下更好控制。比如光圈的大小,相比另外兩項(xiàng)參數(shù)就更容易改變。
2022-09-26 16:52:211161 主動式視覺系統(tǒng)利用獨(dú)立的人工光源,主動投射到觀測對象來測量景深。主動式視覺根據(jù)投射光源和景深技術(shù)原理的不同,又分為三小類:三角測距法、結(jié)構(gòu)光法、飛行時(shí)間法。
2022-10-08 09:58:341704 BT-TOTS系列雙遠(yuǎn)心光學(xué)實(shí)驗(yàn)臺是進(jìn)行精密測量試驗(yàn)的理想選擇,其配備雙遠(yuǎn)心鏡頭和遠(yuǎn)心平行光源,繼承了雙遠(yuǎn)心鏡頭的優(yōu)點(diǎn):大景深、低畸變以及放大倍率一致性。綜合了遠(yuǎn)心平行光源的優(yōu)點(diǎn):極高的信噪比、極少的漫反射以及提高遠(yuǎn)心鏡頭的景深和遠(yuǎn)心度。適用于原理設(shè)計(jì)、可行性研究、模擬演示系統(tǒng)、教學(xué)平臺搭建。
2023-01-11 09:37:08359 
根據(jù)使用情況(物體尺寸和需要的分辨率)選擇物方尺寸合適的物方鏡頭和CCD或CMOS相機(jī),同時(shí)得到像方尺寸,即可計(jì)算出放大倍率,然后根據(jù)產(chǎn)品列表選擇合適的像方鏡頭。選擇過程中還應(yīng)注意景深指標(biāo)的影響,因?yàn)橄?物倍率越大景深越小,為了得到合適的景深,可能還需要重新選擇鏡頭。
2023-02-08 10:20:051680 物體和鏡頭之間間隔(W.D)雖然改變,介在前后必定規(guī)模內(nèi)所成像依然感受明晰,這個(gè)間隔規(guī)模補(bǔ)稱為景深。相反的,對應(yīng)于斷定的物平面,成像面和鏡頭之間的間隔不一樣,但在必定的規(guī)模內(nèi)圖畫仍感受明晰,稱為焦深。
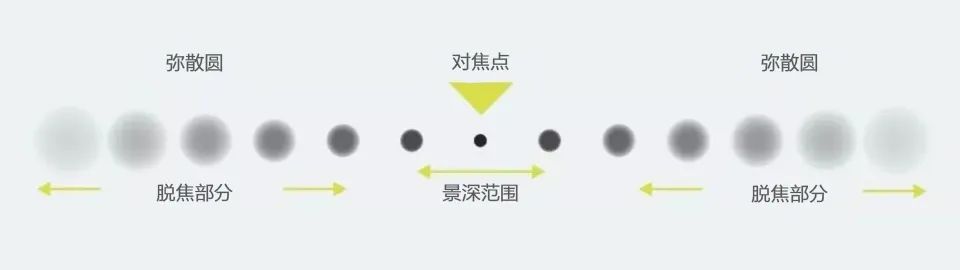
2023-03-30 11:28:25912 ? 1、概念 指聚焦清晰的焦點(diǎn)前后可接受的清晰區(qū)域 景深很淺時(shí),焦點(diǎn)是一層非常薄的落在物體上的平面,平行于數(shù)碼相機(jī)中感光元件所在的平面。 當(dāng)影響景深的條件發(fā)生變化時(shí),如鏡頭光圈縮小時(shí),明顯的清晰范圍
2023-06-02 15:53:08481 可以說磁芯是電感的核心部件之一,那么你知道磁芯是怎么制成的嗎?事實(shí)上,磁芯是由不同的粉體配方,并經(jīng)過專業(yè)生產(chǎn)設(shè)備按一定比例加工而成的。本文將和大家分享的鐵氧體磁芯就是一種應(yīng)用廣泛的磁芯類型。鐵氧體磁芯電感是電感的一種特殊形態(tài),它的基本結(jié)構(gòu)是在鐵氧體磁柱中插入一根導(dǎo)線,它具有類似電感的一般特性,但也有自己的一些特殊特性。前面我們提到,磁芯是根據(jù)一定的工藝要求采用不同的粉末配方制成的,鐵氧體磁芯也是如
2022-05-13 11:40:47546 
谷景深度揭秘工字直插電感可以用哪些電感代替 編輯:谷景電子 工字直插電感是一種非常普遍的電感器件,常用于濾波、耦合和隔離電路中。但是,在某些情況下,我們可能需要使用其他類型的電感代替工字直插電感
2023-07-05 21:48:58392 在機(jī)器視覺應(yīng)用中,產(chǎn)品質(zhì)量檢測或條形碼掃描應(yīng)用場景下,通常利用高f/#鏡頭的大景深,但是隨著f/#的增加,更大的景深也會帶來明顯的缺點(diǎn)。因?yàn)楣馊Τ叽绫粶p小了,通過系統(tǒng)的光線更少,降低了分辨率,延長了曝光時(shí)間,這對產(chǎn)線的效率提升是不利的。
2023-07-26 09:51:09475 
鏡頭的主要參數(shù)有焦距、分辨率、工作距離、景深、視野范圍、畸變量等。
2023-08-19 14:28:27948 算法景深與光機(jī)和相機(jī)景深的關(guān)聯(lián)的確有點(diǎn)不好理解,這玩意兒有點(diǎn)復(fù)雜,和不同的硬件實(shí)現(xiàn)方法還有區(qū)別。正常情況下,光機(jī)的景深范圍會選取的比相機(jī)的大一些,這樣可以保證相機(jī)景深范圍內(nèi)的數(shù)據(jù)有效性
2023-09-01 15:21:25562 1、景深景深即在鏡頭架設(shè)好后,與被測物體間相對距離不做任何調(diào)節(jié)的情況下,可接受的能清晰成像的物方空間范圍。在機(jī)器視覺中,相機(jī)芯片為光學(xué)系統(tǒng)的像平面,物方與像平面共軛的平面稱為對準(zhǔn)平面。嚴(yán)格的來講
2023-10-08 15:10:36752 
理解景深原理前,我們必須明白一件事:當(dāng)我們對焦時(shí),其實(shí)只有一個(gè)平面是真正合焦的。這個(gè)平面與像平面(可以簡單理解為膠片或者傳感器平面)平行。凡是在這個(gè)平面之前或者之后的都不是合焦?fàn)顟B(tài)。
2023-12-06 10:20:39222 
具體涉及到的知識點(diǎn)如下: 天空球 霧化 輝光 景深 這是最終效果: 天空球: 天空球(SkyBox)簡單來說,就是用來在3D場景中模擬藍(lán)天白云的效果。它是一個(gè)球形網(wǎng)格,完全包圍3D場景,并填充了一張
2023-12-07 11:07:48238 
在自動駕駛測試場景標(biāo)準(zhǔn)化過程中,實(shí)現(xiàn)不同采集平臺和技術(shù)方案的兼容性以及數(shù)據(jù)庫數(shù)據(jù)的互通共享,主要可以從以下幾個(gè)方面著手。
2024-02-29 10:12:23182 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論