貿(mào)澤電子 即日起備貨Bosch的BMI270 智能慣性測(cè)量單元 (IMU)。
2019-08-28 15:36:56 1691
1691 作為一款基于MEMS技術(shù)的6-DOF三重冗余高精度慣性測(cè)量單元,OpenIMU330既能提供準(zhǔn)確定位,又能夠通過冗余架構(gòu)大幅提高產(chǎn)品安全級(jí)別。
2019-09-03 16:19:001467 單元IMU和垂直測(cè)量單元VRU產(chǎn)品特點(diǎn):慣性測(cè)量單元垂直陀螺陀螺儀零偏穩(wěn)定性8°/hr加速度計(jì)零偏穩(wěn)定性0.04mg垂直陀螺儀算法,姿態(tài)精度±0.25°集成高精度壓力計(jì)相比于3DM-GX3-25航姿參考系統(tǒng),3DM-GX3-15缺少了一個(gè)三軸磁力計(jì)。姿態(tài)角當(dāng)中的橫滾和傾斜精度±0.25,航向沒有參考。
2020-12-07 09:05:45
MS-2163:利用集成式MEMS慣性傳感器改 善工業(yè)控制
2019-09-03 14:31:55
本文介紹了MEMS慣性傳感器(例如陀螺儀和加速計(jì))如何幫助人或機(jī)器克服空間定向障礙。文章介紹了外力和運(yùn)動(dòng)對(duì)系統(tǒng)工作的影響,以及元件布局和安裝條件(空間關(guān)系)對(duì)MEMS慣性傳感器性能的直接影響。
2021-04-09 07:05:20
意法半導(dǎo)體公司推出一系列慣性傳感器,極具誘惑力的價(jià)格配合卓越的產(chǎn)品性能,讓意法半導(dǎo)體迅速擴(kuò)大了在消費(fèi)電子MEMS傳感器市場(chǎng)的份額。公司在MEMS技術(shù)特性上實(shí)現(xiàn)了兩全其美:更小尺寸、更低價(jià)格、更高
2019-11-05 06:19:06
MEMS(Micro-Electro-Mechanical System)是指集機(jī)械元素、微型傳感器以及信號(hào)處理和控制電路、接口電路、通信和電源于一體的完整微型機(jī)電系統(tǒng)。MEMS慣性傳感器可構(gòu)成
2020-05-18 06:28:30
應(yīng)用。雖然沒有可以實(shí)現(xiàn)預(yù)期目標(biāo)的靈丹妙藥式傳感器,但必需有多個(gè)技術(shù)節(jié)點(diǎn),每個(gè)節(jié)點(diǎn)都具有前沿性能。此外,它涉及大規(guī)模傳感器融合和系統(tǒng)集成方法。 高性價(jià)比、高性能MEMS慣性傳感器現(xiàn)可為潛在的解決方案提供
2018-10-30 14:52:39
能力。ADI將其專利的MEMS IP與業(yè)界領(lǐng)先的信號(hào)處理能力相結(jié)合,從而在高性能MEMS領(lǐng)域一枝獨(dú)秀。ADI慣性測(cè)量單元(IMU)解決了復(fù)雜航空電子系統(tǒng)中慣性傳感器的部署難題,此種部署必須依靠尺寸
2018-10-17 09:43:58
。圖1. 慣性MEMS加速度計(jì)的掃描電子顯微鏡(SEM)圖像。多晶硅指懸浮在減壓腔,從而可通過相鄰信號(hào)調(diào)理電子器件測(cè)量與加速度成正比的運(yùn)動(dòng)和電容。尺寸和重量對(duì)于機(jī)載應(yīng)用,例如健康和使用監(jiān)控系統(tǒng)
2018-10-12 11:01:36
級(jí)別。各個(gè)級(jí)別的產(chǎn)品又分為GNSS輔助慣導(dǎo)系統(tǒng)、AHRS航姿參考系統(tǒng)、垂直陀螺和IMU慣性測(cè)量單元。LORD MicroStrain sensing system的產(chǎn)品具有重量輕(較小僅8g),體積小
2020-12-07 09:06:55
GSM系統(tǒng)的測(cè)量解決方案產(chǎn)品概述
2019-05-15 16:39:19
旋轉(zhuǎn)運(yùn)動(dòng)。由于某些最終產(chǎn)品在其他形式的運(yùn)動(dòng)以外還須測(cè)量旋轉(zhuǎn),所以可以將陀螺儀集成到慣性測(cè)量單元(IMU)中,其中內(nèi)嵌了一個(gè)多軸陀螺儀和一個(gè)多軸加速度計(jì)。利用加速度提升可用性,進(jìn)行電源管理前面我們注意到
2018-11-01 11:33:50
是慣性傳感器的作用主要體現(xiàn)在最終產(chǎn)品有必要檢測(cè)加速度和減速度的時(shí)候。誠然,從純科學(xué)的角度來看,確實(shí)是這樣。但是,這種看法忽視了MEMS加速度計(jì)和陀螺儀日益增加的諸多用途…… 通過審視五種運(yùn)動(dòng)檢測(cè)模式
2019-07-16 06:49:53
戴產(chǎn)品來說,應(yīng)用要求通常推動(dòng)著對(duì)復(fù)雜傳感器的需求,甚至已經(jīng)超越了最先進(jìn) MCU 中的傳感器。 WDK1.0 通過集成 ON Semi 基于 MEMS 的 FIS1100 慣性測(cè)量裝置 (IMU) IC
2018-07-18 16:03:06
FEBFIS1100MEMS_IMU6D3X,用于FIS1100 6D MEMS慣性測(cè)量單元(IMU)的評(píng)估板,帶有傳感器融合,用于指定系統(tǒng)級(jí)定向精度。將FIS1100與提供的XKF3 9D傳感器
2020-05-04 13:24:41
容量變化并傳輸其測(cè)量值。在傳感器的生產(chǎn)過程中,質(zhì)量和彈簧(記住,這些結(jié)構(gòu)通常只有千分之一毫米厚)被蝕刻在硅上,其可以大量生產(chǎn)MEMS,同時(shí)也消耗更少的能量。 圖2 產(chǎn)品實(shí)物圖 MEMS慣性傳感器
2020-07-07 09:36:40
基于這樣一個(gè)事實(shí):給MEMS施加一個(gè)輸入力(Fin)將產(chǎn)生一定的位移,進(jìn)而改變MEMS電容(Cout)。這個(gè)Cout可以用連接MEMS單元的電路進(jìn)行測(cè)量。帶激勵(lì)電極的MEMS傳感器建模如圖1所示。這個(gè)
2018-11-06 16:07:28
:::SCHA小型通用型編碼器-產(chǎn)品說明:::1、SCHA編碼器外徑Ф38,軸徑Ф6,止口Ф20,電源5-30V,分辨率達(dá)2500P/R。2、SCHA編碼器輸出有電壓、推挽、集電極開路、長(zhǎng)線驅(qū)動(dòng)等
2021-11-05 15:14:02
:::SCHA小型通用型編碼器-產(chǎn)品說明:::1、SCHA編碼器外徑Ф38,軸徑Ф6,止口Ф20,電源5-30V,分辨率達(dá)2500P/R2、SCHA編碼器輸出有電壓、推挽、集電極開路、長(zhǎng)線驅(qū)動(dòng)等3
2021-10-15 15:20:47
室內(nèi)無線測(cè)量系統(tǒng) - 產(chǎn)品概述
2019-05-15 11:44:00
遇到一個(gè)很棘手的問題,大家有沒用過ADI公司的慣性測(cè)量單元傳感器ADIS16365,由于買來時(shí)沒有相應(yīng)的PCB接口,導(dǎo)致找不到對(duì)應(yīng)的類似排母的接口,是2*12P的,引腳間距1mm,高2mm,針腳0.305mm。如下圖所示
2014-12-29 17:22:46
無錫瑞吉星電子的RJX-IMU-164系列;
參數(shù)如下:
一 、概述
RJX-IMU-16460高精度慣性測(cè)量單元是一款小型高精度MEMS慣性測(cè)量單元,可與ADIS-16460實(shí)現(xiàn)原位插拔替換、內(nèi)部
2024-01-18 13:46:16
基于 MEMS 的慣性測(cè)量裝置 (IMU) 可定義為系統(tǒng)級(jí)封裝。 它包括加速計(jì)機(jī)械感測(cè)元件、陀螺儀機(jī)械感測(cè)元件以及電子電路(“大腦”),以便將加速度和角速度轉(zhuǎn)換為可讀格式。 MEMS IMU 的開發(fā)
2017-03-31 12:31:30
ADIS16334和 ADIS16375是兩款高度集成的精密 MEMS(微機(jī)電系統(tǒng))慣性傳感器,可以幫助工業(yè)和醫(yī)療設(shè)備制造商更輕松地實(shí)現(xiàn)運(yùn)動(dòng)捕獲和控制功能。新款 IMU(慣性測(cè)量單元)實(shí)現(xiàn)了極高
2018-12-04 15:25:12
體積和質(zhì)量比常規(guī)慣性導(dǎo)航系統(tǒng)至少下降2一3個(gè)數(shù)量級(jí)。采用MEMS技術(shù)制造的微型慣性測(cè)量單元(MIMU),沒有轉(zhuǎn)動(dòng)的部件,在壽命、可靠性、成本、體積和質(zhì)量等方面都要大大優(yōu)于常規(guī)的慣性儀表。所生
2016-12-07 15:45:00
電系統(tǒng)(MEMS)慣性傳感器的設(shè)計(jì)在本質(zhì)上對(duì)運(yùn)動(dòng)非常敏感,可有效檢測(cè)和處理線性加速、磁航向、海拔和角速率信息。為充分利用慣性傳感器的性能潛力,設(shè)計(jì)者必須熟悉總體機(jī)械系統(tǒng),密切關(guān)注應(yīng)用中的運(yùn)動(dòng)源和諧
2018-11-12 15:38:15
軸對(duì)齊誤差。不知道這個(gè)慣性測(cè)量系統(tǒng)能不能滿足要求?其中,勻速運(yùn)動(dòng)的速度可以自己控制。2.我第一購買慣性測(cè)量系統(tǒng),不知道這個(gè)系統(tǒng)輸出給用戶的是不是就是測(cè)量的位移(振幅)和角度?3.每次查找看的參數(shù)都是加速度值,如果我已知振幅(位移)的需求怎么選擇加速度的參數(shù)?謝謝!!
2018-08-17 06:54:10
慣性離心機(jī)概述工業(yè)離心機(jī)廣泛應(yīng)用于石油、化工、冶金、醫(yī)藥、食品、輕工等部門,一般是工藝流程中的后處理設(shè)備或成品環(huán)節(jié),對(duì)其的應(yīng)用和控制直接關(guān)系到最終產(chǎn)品的產(chǎn)量和質(zhì)量。離心機(jī)屬于起動(dòng)慣量大、加減速頻繁
2021-07-05 07:29:02
微機(jī)電系統(tǒng)(MEMS)運(yùn)動(dòng)IC在走向更高的集成度、更小的芯片尺寸、更低的成本以及更高的性能和可靠性。這些趨勢(shì)在最新的加速度計(jì)、陀螺儀和慣性測(cè)量單元(IMU)上得到了體現(xiàn),使得MEMS器件得以滿足多種下一代電子產(chǎn)品,特別是消費(fèi)電子產(chǎn)品的需求。
2019-10-29 07:52:04
YIS370-U是一款輕量級(jí)、小尺寸、高精度、低功耗的工業(yè)級(jí)慣性測(cè)量單元,為無人智能化載體、穩(wěn)定平臺(tái)、導(dǎo)航控制等應(yīng)用提供精確的IMU原始角速率、加速度等信息。
2022-06-17 15:18:03
開發(fā)一種生物運(yùn)動(dòng)微慣性測(cè)量裝置,以基于 ARM7 的LPC2129 為核心處理單元,采用MEMS 陀螺和MEMS 加速度計(jì)為測(cè)量傳感器。該裝置實(shí)現(xiàn)了對(duì)SPC-III 機(jī)器魚尾鰭拍動(dòng)參數(shù)的精確測(cè)量,為
2009-11-26 11:49:30 17
17 ADISl6355 MEMS的慣性測(cè)量組件系統(tǒng)設(shè)計(jì)
首先簡(jiǎn)介ADISl6355AMLZ型MEMS的原理、構(gòu)成及應(yīng)用。在此基礎(chǔ)上,搭建一個(gè)硬件平臺(tái),采用內(nèi)置USB控制器的AT89C513lA型單片機(jī)
2010-04-07 14:30:07577 
Analog Devices, Inc.(ADI),最近正式全面推出ADIS16407 iSensor IMU(慣性測(cè)量單元),它在單個(gè)封裝中集成一個(gè)三軸陀螺儀、一個(gè)三軸加速度計(jì)、一個(gè)三軸磁力計(jì)和一個(gè)壓力傳感器。
2011-06-24 09:03:192025 提出了一種捷聯(lián)式慣性測(cè)量單元的設(shè)計(jì)與實(shí)現(xiàn)方法。該系統(tǒng)以開環(huán)光纖陀螺和硅微加速度計(jì)作為慣性敏感元件,采用高速DSP 作為中央處理器實(shí)現(xiàn)數(shù)據(jù)采集、處理及輸出。重點(diǎn)介紹了系統(tǒng)
2011-09-13 15:01:5020 霍尼韋爾(紐交所代碼:HON)近日宣布推出6DF系列六維運(yùn)動(dòng)變量型慣性測(cè)量單元,6DF系列產(chǎn)品可以應(yīng)用在交通運(yùn)輸系統(tǒng)、工業(yè)和航天系統(tǒng)。
2013-03-05 18:15:351156 MEMS慣性測(cè)量單元自動(dòng)校準(zhǔn)算法研究與實(shí)現(xiàn)
2015-11-25 10:22:4919 利用MEMS慣性感測(cè)技術(shù)實(shí)現(xiàn)應(yīng)用變革 pdf
2016-01-07 16:17:180 對(duì)于在反饋環(huán)路中采用MEMS慣性測(cè)量單元(IMU)的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對(duì)準(zhǔn)誤差常常是其關(guān)鍵考慮之一。
2016-11-05 03:56:253578 
基于MEMS陀螺和加計(jì)的微慣性測(cè)量單元研制
2016-12-17 16:33:3912 基于分度臺(tái)轉(zhuǎn)位裝置的慣性測(cè)量單元智能檢測(cè)_王斌
2017-01-12 22:48:461 應(yīng)用積體電路(ASIC)或微控制器。本文簡(jiǎn)要介紹MEMS加速度計(jì)感測(cè)器和陀螺儀,并探討其工作塬理、感測(cè)機(jī)制以及目前市場(chǎng)上多樣化的應(yīng)用,以及對(duì)我們?nèi)粘I钌钸h(yuǎn)的影響。 MEMS慣性感測(cè)器 MEMS感測(cè)器在許多應(yīng)用裝置中沿一個(gè)或多個(gè)軸向測(cè)量線
2017-10-21 09:17:012 和加速度,并以此解算出物體的姿態(tài),在導(dǎo)航中用著很重要的應(yīng)用價(jià)值,慣性測(cè)量單元(IMU)PA-IMU-01D采用三個(gè)單軸的高精度MEMS陀螺儀和三個(gè)單軸的高精度MEMS加速度計(jì),通過信號(hào)調(diào)理
2018-04-27 16:33:471885 BM1160是高度集成的、低功率的慣性測(cè)量單元(IMU),它提供精確的加速度和角速率(陀螺)測(cè)量。
2018-09-21 08:00:0016 麥姆斯咨詢:高精度慣性傳感器主要用于測(cè)量傾角、加速度和振動(dòng)等。慣性傳感器作為MEMS器件,以單晶硅傳感器元件為基礎(chǔ),采用最新的微機(jī)械加工技術(shù)制備。
2019-01-29 16:35:2117347 
本文檔的主要內(nèi)容詳細(xì)介紹的是IMUKit 9軸慣性測(cè)量單元的串口上位機(jī)軟件應(yīng)用程序免費(fèi)下載。
2019-05-24 08:00:005 新納傳感系統(tǒng)有限公司(下稱“新納傳感”)今天在SENSOR CHINA2019推出了全新產(chǎn)品 OpenIMU330。作為一款基于MEMS技術(shù)的6-DOF三重冗余高精度慣性測(cè)量單元
2019-09-12 11:40:004414 慣性測(cè)量單元Inertial measurement unit,簡(jiǎn)稱IMU,是測(cè)量物體三軸姿態(tài)角(或角速率)及加速度的裝置。陀螺儀和加速度計(jì),是慣性導(dǎo)航系統(tǒng)的核心裝置。借助內(nèi)置的加速度傳感器和陀螺儀,IMU可測(cè)量來自三個(gè)方向的線性加速度和旋轉(zhuǎn)角速率,通過解算可獲得載體的姿態(tài)、速度和位移等信息。
2019-10-04 17:12:0010522 MEMS慣性傳感器包括MEMS陀螺儀及MEMS加速度計(jì),其分類有多種方式,根據(jù)精度由低到高其可分為消費(fèi)級(jí)(零偏》100°/h)和戰(zhàn)術(shù)級(jí)(零偏0.1°/h ~ 10°/h)。
2019-10-10 15:05:117588 慣性測(cè)量單元(Inertialmeasurementunit,簡(jiǎn)稱IMU)被定義為“無需外部參考的可測(cè)量三維線運(yùn)動(dòng)及角運(yùn)動(dòng)的裝置”,即測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。
2020-01-23 11:49:003523 慣性測(cè)量單元(Inertialmeasurementunit,簡(jiǎn)稱IMU)被定義為“無需外部參考的可測(cè)量三維線運(yùn)動(dòng)及角運(yùn)動(dòng)的裝置”,即測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。
2020-02-12 15:58:243698 詳細(xì)解說IMU慣性測(cè)量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-11 11:00:131752 詳細(xì)解說IMU慣性測(cè)量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-01 11:22:016930 慣性測(cè)量單元的原理和應(yīng)用介紹 慣性測(cè)量單元是通過加速度計(jì)和陀螺儀測(cè)量運(yùn)動(dòng)載體的方位與姿態(tài)的裝置,它與AHRS的功能與裝置都很相像,但是最大的區(qū)別是航姿參考系統(tǒng)包含了嵌入式的姿態(tài)數(shù)據(jù)解算單元與航向信息
2020-06-01 11:09:294336 慣性測(cè)量單元的原理和應(yīng)用介紹 慣性測(cè)量單元是通過加速度計(jì)和陀螺儀測(cè)量運(yùn)動(dòng)載體的方位與姿態(tài)的裝置,它與AHRS的功能與裝置都很相像,但是最大的區(qū)別是航姿參考系統(tǒng)包含了嵌入式的姿態(tài)數(shù)據(jù)解算單元與航向信息
2020-06-08 17:24:232644 IMU慣性測(cè)量單元是什么? 慣性測(cè)量單元是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。一般的,一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測(cè)物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度
2020-04-20 10:32:576231 IMU慣性測(cè)量單元是什么? IMU大多用在需要進(jìn)行運(yùn)動(dòng)控制的設(shè)備,如汽車和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。 IMU的基組成 利用
2020-04-18 00:35:09740 MEMS(Micro-Electro-Mechanical System)是指集機(jī)械元素、微型傳感器以及信號(hào)處理和控制電路、接口電路、通信和電源于一體的完整微型機(jī)電系統(tǒng)。MEMS慣性傳感器可構(gòu)成
2020-04-23 10:54:221820 IMU慣性測(cè)量單元的基本原理 IMU是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。 其中一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測(cè)物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度信號(hào)
2020-04-26 15:26:353559 慣性測(cè)量單元的應(yīng)用 慣性測(cè)量單元用于安裝了慣性導(dǎo)航系統(tǒng)的交通工具。如今,幾乎每個(gè)商業(yè)或軍事船只都安裝了慣性測(cè)量單元。大多數(shù)飛機(jī)也配備了慣性測(cè)量單元。同時(shí),慣性測(cè)量單元也在飛行器中單獨(dú)使用,將慣性測(cè)量
2020-04-26 11:28:34731 慣性測(cè)量單元的應(yīng)用 慣性測(cè)量單元用于安裝了慣性導(dǎo)航系統(tǒng)的交通工具。如今,幾乎每個(gè)商業(yè)或軍事船只都安裝了慣性測(cè)量單元。大多數(shù)飛機(jī)也配備了慣性測(cè)量單元。同時(shí),慣性測(cè)量單元也在飛行器中單獨(dú)使用,將慣性測(cè)量
2020-04-26 11:19:071727 IMU慣性測(cè)量單元介紹 慣性測(cè)量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測(cè)當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測(cè)在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些慣性測(cè)量單元還同時(shí)包括
2020-06-08 14:29:334054 IMU慣性測(cè)量單元詳解 慣性測(cè)量單元的工作原理。慣性測(cè)量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測(cè)當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測(cè)在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些
2020-06-01 10:37:199178 根據(jù)外媒報(bào)道,近日,日本村田制作所宣布,成功研發(fā)了符合AEC-Q100標(biāo)準(zhǔn)的六軸MEMS慣性傳感器——SCHA600。
2020-07-21 16:54:31430 為了提高汽車設(shè)計(jì)的安全性,村田(Murata)近期發(fā)布了其最新6軸一體封裝、3D MEMS慣性力傳感器“SCHA600系列”,慣性傳感器將其數(shù)據(jù)與GNSS和許多感知傳感器(從攝像機(jī)到雷達(dá)和激光雷達(dá))融合在一起,從而在偏差穩(wěn)定性和噪聲方面提供高性能。
2020-08-05 10:42:351917 傳感器的作用。 MEMS技術(shù)擁有非常廣闊的市場(chǎng)前景,特別是進(jìn)入物聯(lián)網(wǎng)時(shí)代,由于應(yīng)用場(chǎng)景種類繁多,再加上產(chǎn)品生產(chǎn)技術(shù)的多樣化,為企業(yè)帶來了巨大的發(fā)展機(jī)遇。從我國MEMS各產(chǎn)品市場(chǎng)占比來看,MEMS慣性傳感器占有超過30%的份額。
2020-08-28 15:16:402891 
村田開發(fā)出一種新型MEMS(微機(jī)電系統(tǒng))6DoF慣性傳感器,可用于無人駕駛的越野車、動(dòng)態(tài)傾角傳感和GNSS定位輔助。該傳感器將為高級(jí)駕駛員或操作人員輔助系統(tǒng)、無人駕駛汽車和GNSS測(cè)量儀器提供更加
2021-03-02 14:06:372306 HG1125和HG1126采用MEMS慣性傳感器來精確測(cè)量運(yùn)動(dòng),是霍尼韋爾戰(zhàn)術(shù)級(jí)IMU工廠中最新的產(chǎn)品,該工廠每年向各個(gè)細(xì)分市場(chǎng)的客戶交付近100000套IMU產(chǎn)品,該系列產(chǎn)品的首批交付時(shí)間定于今年6月份。
2021-05-09 09:46:483364 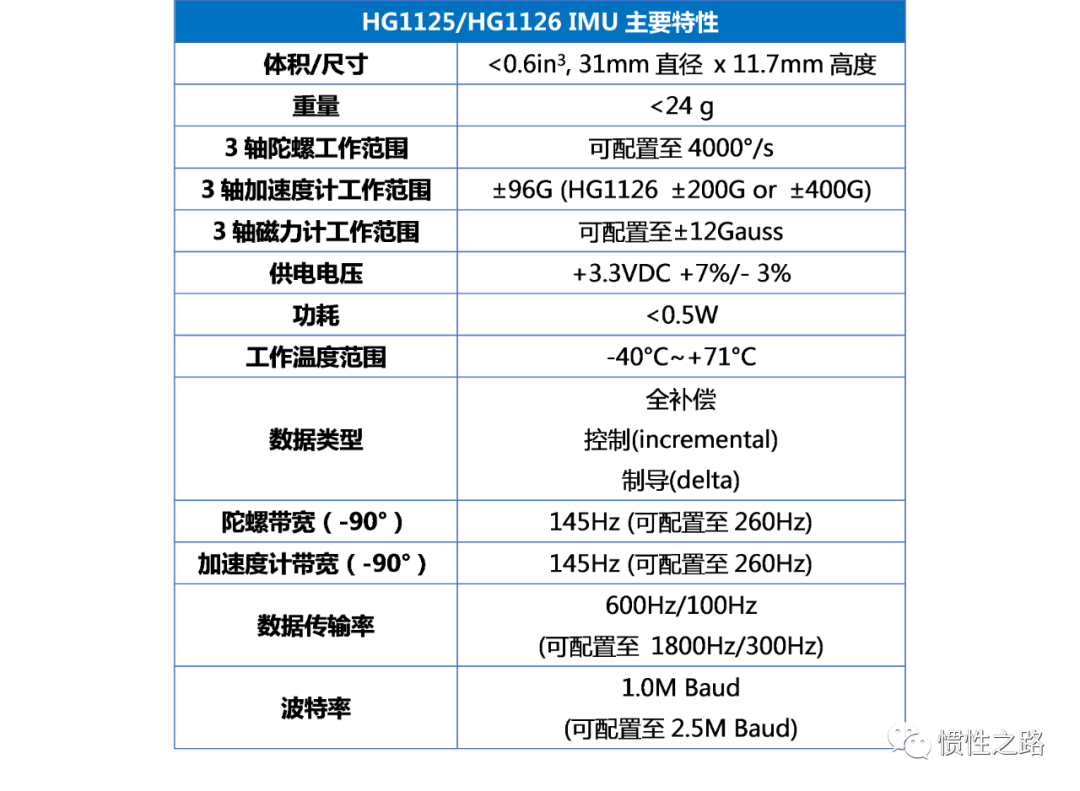
iSensor MEMS慣性測(cè)量單元(IMU)手冊(cè)
2021-05-24 09:37:1121 MEMS慣性傳感器選型表
2021-05-26 11:33:3032 九軸慣性測(cè)量單元IMU_MPU6050中文數(shù)據(jù)手冊(cè)。
2022-03-07 16:31:472 IIM-46234模塊可以在精密應(yīng)用中提供很高的性能。另一方面,IIM-46230模塊能以較低的成本供貨,適用于不需要相同精度水平但仍需要方便、穩(wěn)健和準(zhǔn)確的慣性測(cè)量的應(yīng)用。
2022-05-05 11:31:343246 
LPMS-BE2 是一款低成本、高精度的 6 軸慣性測(cè)量單元。它整合了三軸加速度計(jì)、三軸陀螺儀傳感器,能提供包括歐拉角、四元數(shù)和加速度等信息在內(nèi)的精確數(shù)據(jù)。
2022-06-22 18:01:40456 
據(jù)麥姆斯咨詢介紹,慣性測(cè)量單元(Inertial Measurement Unit,IMU)是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。通常,IMU內(nèi)部集成3軸陀螺儀和3軸加速度計(jì),以及運(yùn)動(dòng)/姿態(tài)算法。如果IMU內(nèi)部集成的傳感器采用MEMS技術(shù)實(shí)現(xiàn),那么可被稱為MEMS IMU。
2022-09-28 10:32:22786 意法半導(dǎo)體于2022年推出智能傳感器處理單元(Intelligent Sensor Processing Unit,ISPU),在MEMS慣性傳感器內(nèi)部進(jìn)一步整合數(shù)字信號(hào)處理器(DSP)和人工智能算法,為系統(tǒng)級(jí)封裝(SiP)器件注入本地決策,同時(shí)顯著節(jié)省空間和功耗,并通過將數(shù)據(jù)保持在本地增強(qiáng)隱私安全性。
2022-10-26 11:13:181105 DG606姿態(tài)傳感模組是基于MEMS慣性傳感技術(shù)的超小型、高精度慣性測(cè)算系統(tǒng),該系統(tǒng)內(nèi)嵌了一顆經(jīng)過標(biāo)定的中宏威宇 MotionCore 軟、硬件核心,可以在任意時(shí)刻、任意運(yùn)動(dòng)狀態(tài)下精確輸出載體的三個(gè)姿態(tài)角。
2022-11-02 11:29:34603 慣性導(dǎo)航是目前國內(nèi)緊缺的高新技術(shù),市場(chǎng)需求多、發(fā)展?jié)摿Υ蟆?b class="flag-6" style="color: red">MEMS慣性傳感器雖然具有微型化、成本低等優(yōu)點(diǎn),然而,單一的消費(fèi)級(jí)MEMS慣性傳感器存在測(cè)量誤差大、穩(wěn)定性差等缺陷,這會(huì)導(dǎo)致MEMS慣性
2022-11-11 09:54:54867 電子發(fā)燒友網(wǎng)站提供《使用arduino/genuino 101的板載慣性測(cè)量單元(IMU)教程.zip》資料免費(fèi)下載
2022-12-19 09:35:230 直接使用慣性測(cè)量單元 (IMU)
2022-12-28 09:51:22750 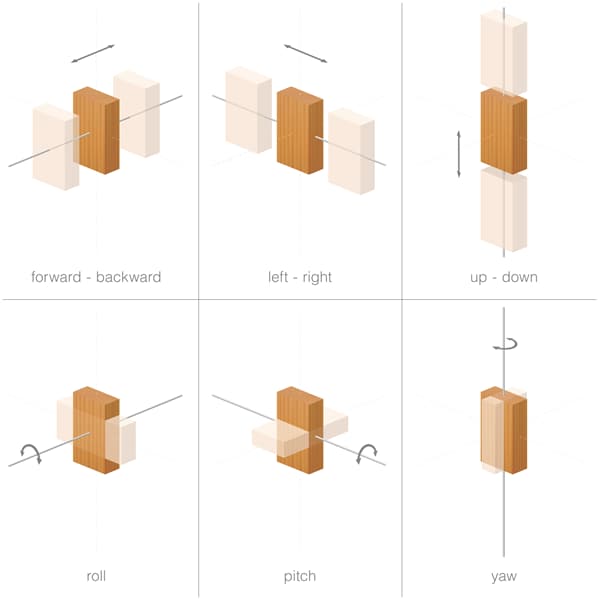
理想情況下,陀螺儀和加速度計(jì)中的多個(gè)軸相互正交。然而,一個(gè)常見的誤解是,由于多軸陀螺儀或加速度計(jì)可以在一個(gè)分立的MEMS組件內(nèi)設(shè)計(jì),因此每個(gè)軸彼此成90°完全正交。盡管這些設(shè)備中的所有慣性傳感器
2023-02-16 11:42:22603 
陀螺儀是測(cè)量角速率的一種器件,是慣性系統(tǒng)的重要組成部分,主要用于導(dǎo)航定位、姿態(tài)感知、狀態(tài)監(jiān)測(cè)、平臺(tái)穩(wěn)定等應(yīng)用領(lǐng)域。MEMS陀螺儀的核心是一顆微機(jī)械(MEMS)芯片,一顆專用控制電路(ASIC)芯片及應(yīng)力隔離封裝。
2023-04-28 09:59:135522 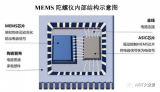
HMS-MM-10系列產(chǎn)品是6自由度的慣性測(cè)量單元,包含高精度,MEMS三軸陀螺儀和三軸加速度計(jì),可以測(cè)量運(yùn)動(dòng)物體的角速度、加速度參數(shù),適用于物體運(yùn)動(dòng)控制或振動(dòng)狀態(tài)下的慣性測(cè)量。HMS-MM-10
2021-09-22 17:57:55452 
航向姿態(tài)參考系統(tǒng)(英文簡(jiǎn)稱AHRS)和慣性測(cè)量單元(英文簡(jiǎn)稱IMU)的聯(lián)系與區(qū)別
2021-12-17 14:10:36736 
公開資料顯示,芯動(dòng)聯(lián)科是一家集高性能MEMS慣性傳感器研發(fā)、測(cè)試、銷售為一體的高新技術(shù)企業(yè)。公司主要產(chǎn)品包括MEMS陀螺儀和MEMS加速器,其產(chǎn)品核心性能指標(biāo)已達(dá)國內(nèi)領(lǐng)先,國際先進(jìn)水平。公司是國內(nèi)少數(shù)可以穩(wěn)定量產(chǎn)高性能慣性傳感器的高科技半導(dǎo)體公司。
2023-07-03 16:06:57476 越來越多的機(jī)器人系統(tǒng)配備了多個(gè)慣性測(cè)量單元(IMU)。由于競(jìng)爭(zhēng)性目標(biāo),當(dāng)用于控制時(shí)期望靠近重心,或者在與外部感知傳感器集成時(shí)為了獲得無阻礙的視野,單個(gè)IMU經(jīng)常被安裝在相當(dāng)遠(yuǎn)的距離上。
2023-07-08 09:41:451103 
據(jù)麥姆斯咨詢報(bào)道,近期,無錫凌思科技有限公司(簡(jiǎn)稱:凌思科技)宣布其開發(fā)的IMU500高精度汽車級(jí)MEMS慣性測(cè)量單元(IMU)已開始批量生產(chǎn)。
2023-07-14 10:17:26338 芯動(dòng)聯(lián)科主要從事高性能本土化MEMS傳感器的研發(fā),主要產(chǎn)品為高性能MEMS慣性傳感器,包括MEMS陀螺儀及MEMS加速度計(jì),在無人系統(tǒng)、信息通訊、自動(dòng)駕駛、石油勘探、高速鐵路、測(cè)量測(cè)繪等場(chǎng)景應(yīng)用廣泛。
2023-08-01 09:27:16352 MEMS加速度計(jì)的內(nèi)部結(jié)構(gòu)和陀螺儀基本類似,主要用于測(cè)量物體的線加速度,本質(zhì)上都屬于MEMS慣性傳感器。從產(chǎn)業(yè)鏈分布來看,公司業(yè)務(wù)處于產(chǎn)業(yè)上游,下游包括無人駕駛、消費(fèi)電子、工業(yè)機(jī)器人等眾多場(chǎng)景。
2023-08-31 16:11:58726 
TAC-440 IMU的突破性性能基于EMCORE成熟的石英MEMS慣性傳感器技術(shù)。EMCORE的石英技術(shù)結(jié)合了石英材料固有的大信號(hào)輸出和熱穩(wěn)定性,可重復(fù)、大批量生產(chǎn)精密加工的傳感器結(jié)構(gòu)。
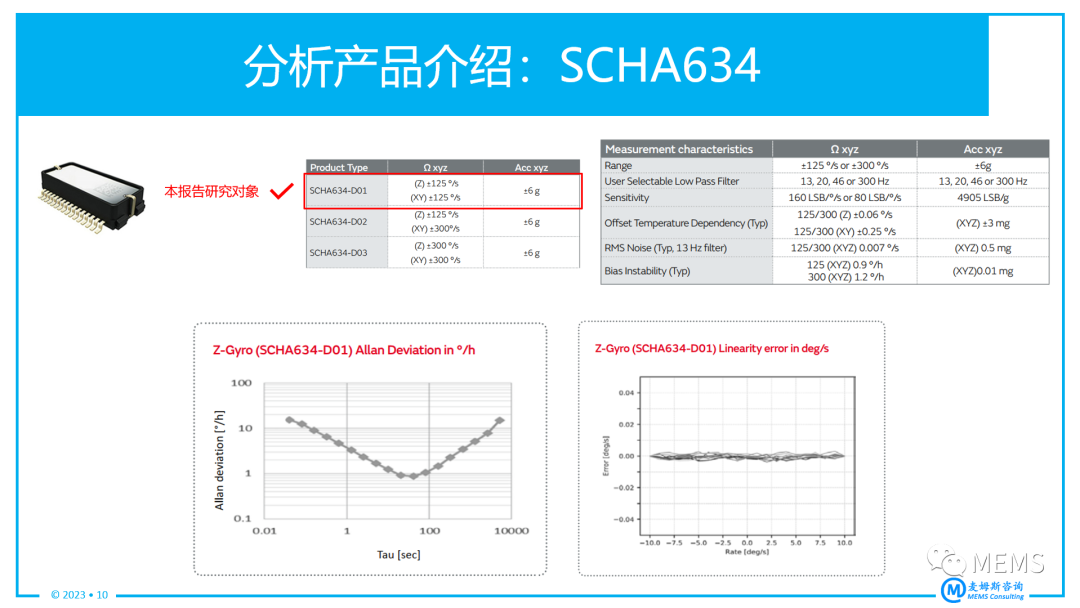
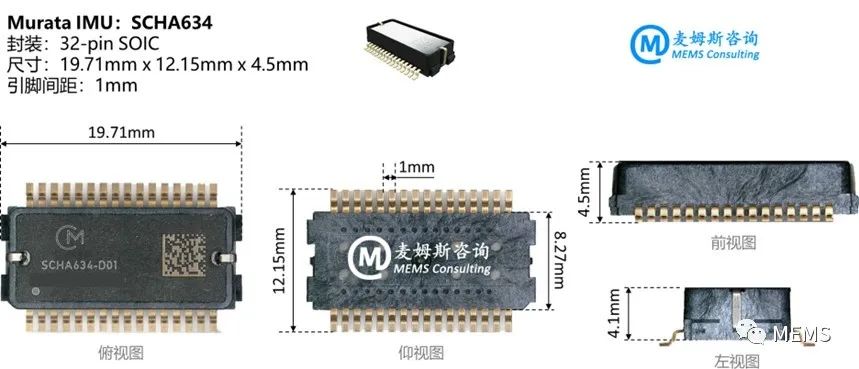
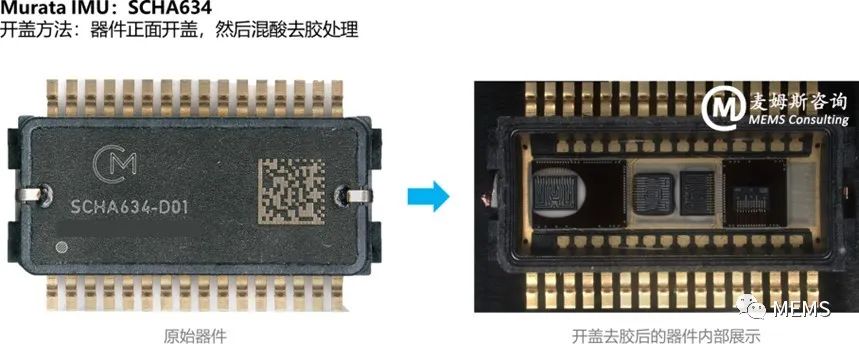
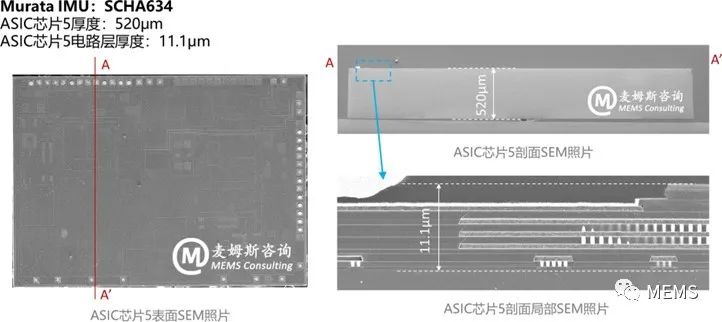
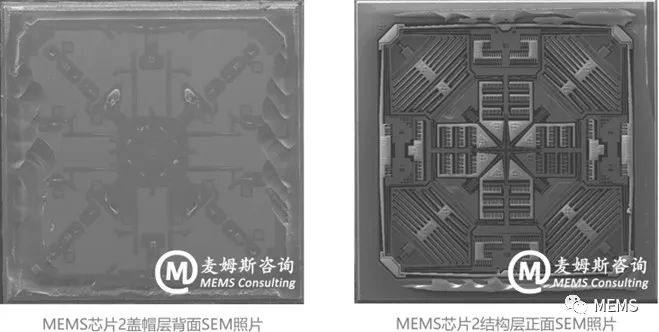
2023-09-15 11:48:12140 村田MEMS慣性測(cè)量單元(IMU)SCHA634產(chǎn)品分析
2023-11-27 16:27:32387 
M-G370PDS0是一個(gè)小的形狀因子慣性測(cè)量單元(IMU),具有6個(gè)自由度:三軸角率和線性加速度,并提供高穩(wěn)定性和高精度的測(cè)量能力精密補(bǔ)償技術(shù)。各種校準(zhǔn)參數(shù)被存儲(chǔ)在IMU的存儲(chǔ)器中,并且是
2024-01-11 09:55:450 一般描述M-G552PJ1是一個(gè)小的形狀因子慣性測(cè)量單元(IMU),具有6個(gè)自由度:三軸角速率和線性加速度,并提供了高穩(wěn)定性和高精度的測(cè)量能力與使用的高精度補(bǔ)償技術(shù)。通過控制器局域網(wǎng)(CAN)接口
2024-01-12 10:56:270 關(guān)于慣性測(cè)量單元的應(yīng)用場(chǎng)景闡述
2024-01-19 11:25:22288
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論