LiDARInnovizPro、S3、SLAM on Chip、VLS-128。激光雷達是自動駕駛系統中一個非常重要的組件。在許多傳統供應商和新創公司看來,未來自動駕駛汽車在障礙探測和 SLAM(實時定位和地圖構建
2018-07-26 20:45:02
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
2018-01-11 09:21:13
想了解行業國內做固態激光雷達的廠家,激光雷達里面是怎么樣的啊
2021-01-17 15:29:39
、速度等特征量的雷達系統,正是這樣的一個系統,成為了無人駕駛汽車的靈魂所在。激光雷達成名于2012年谷歌無人駕駛汽車的橫空出世,當時頭頂“大鐵桶”的谷歌無人駕駛汽車在全世界范圍內引起轟動,“大鐵桶”也
2017-10-20 15:49:06
激光雷達實際上是一種工作在光學波段(特殊波段)的雷達,它的優點非常明顯:1、具有極高的分辨率:激光雷達工作于光學波段,頻率比微波高2~3個數量級以上,因此,與微波雷達相比,激光雷達具有極高的距離
2017-09-19 15:51:15
lidar_camera_calibration項目——激光雷達和相機聯合標定
2019-04-12 09:27:38
最為重要的,目前,主流的用于周圍環境感測的傳感器有激光雷達、毫米波雷達、視覺傳感器三種。1.自適應巡航控制系統 Adaptive Cruise Control(ACC)自適應巡航控制系統是一種智能化
2017-10-18 17:18:24
`科技的進步日新月異,要數在汽車圈子里最火熱的詞匯,自動駕駛輔助系統一定是位居榜單前列的,而自動駕駛中核心的硬件之一—激光雷達,也是屢屢被各家車企送上熱搜榜單,成為了業界內關注的重心。激光雷達被
2021-03-18 11:14:17
漸漸覺得激光雷達是非常重要的。從左邊看,這是一個傳感器的輸入,如激光雷達、攝像頭、毫米波、GPS、編碼器和 IMU。這些傳感器的數據輸入到系統的感知算法里,對于這個感知算法,我們會將這些數據進行處理分析
2017-09-08 17:24:48
接收器,接收端通過光電探測器形成信號接收,經過信號處理得到目標的距離、速度等信息或實現三維成像。激光雷達主要包括激光發射部分、掃描系統、激光接受部分和信息處理部分,結構較為復雜。從激光雷達的工作來看,主要分成四大部分:1)激光發射部分:激勵源周期性地驅動激光器,發射激光脈沖,激光調制器通過光束
2021-09-13 06:30:11
就非常重要。一款號稱有10多米的激光雷達,如果對于深色物體只有幾米的檢出率,那就容易導致機器定位和建圖出現問題,對后期的定位導航工作也會產生很大的影響。目前,激光雷達所標稱的距離大多以90%反光率
2018-02-07 13:40:27
`最近突然對機器人距離探測設備感興趣就打算著手做個激光雷達玩玩。。。。可以在設計方案的時候發現角度信息很難解決。多以想看看大家有沒有做過這方面的。幫忙想下。。。。如果哪位土豪家里有掃地機器人可以拆下,,,,,給大家介紹下,,,哈哈哈。。。。哪位大神如果做過,,,能不能幫幫偶。。。`
2016-04-16 17:45:28
被測物體與測試點的距離。傳統上,激光雷達可用于工業的安全檢測領域,如科幻片中看到的激光墻,當有人闖入時,系統會立馬做出反應,發出預警。另外,激光測距雷達在空間測繪領域也有廣泛應用。但隨著人工智能
2020-07-14 07:56:45
比對上一幀和下一幀環境的變化可以較為容易的探測出周圍的車輛和行人。2.SLAM加強定位。激光雷達另一大特性是同步建圖(SLAM),實時得到的全局地圖,通過與高精度地圖中特征物的比對,可以實現導航及加強
2017-10-16 16:31:32
在很多人印象中激光雷達還是那個通過旋轉完成激光測距幫助機器人完成定位、建圖輔助后續導航的激光傳感器RPLIDAR定位建圖 但其實,除了可以應用在機器人定位建圖、自主導航、障礙物檢測與規避等領域外他
2018-05-11 15:33:44
計算機視覺的一個組件,但點云卻是完全基于幾何呈現的。相反,人眼除了形狀之外還能識別物體的其他物理屬性,比如顏色和紋理。現在的激光雷達系統不能區分紙袋和巖石之間的差別,而這本應是傳感器理解和試圖避開障礙物時考慮的因素。
2017-09-26 14:30:16
地實現多AGV小車的協調控制。 ■激光雷達在AGV小車中的使用 SLAM中可以進行環境信息感知的主要傳感器有激光雷達、攝像頭等。其中,基于激光雷達的AGV小車自主定位與建圖的方法,由于其測量精度高
2018-11-09 15:59:01
有道友能介紹介紹EAI激光雷達嗎?
2020-12-31 17:48:20
FMCW激光雷達與dTOF激光雷達的區別在哪?
2021-07-23 13:22:37
數字化是很重要的一個環節。圖1是差分激光雷達接收系統的原理圖,圖上只列出了主要部件。下面我們重點介紹一下對數據采集卡的要求。激光雷達通常以20HZ的頻率發射激光脈沖,要求AD采集卡以10MHZ的速度與發射
2016-05-23 14:44:42
TOF 方案激光雷達是激光雷達新一代技術方案,本產品解決了如市場三角測試法等產品組裝問題難,價格成本高等問題,目前提供面陣及單光子技術,基于COM產品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX學習筆記——TOF 高速單線激光雷達 L10_串口中斷通信1. TOF 高速單線激光雷達 L102. STM32 Cube MX配置代碼配置1. TOF 高速單線激光雷達
2022-03-02 07:19:03
就非常重要。一款號稱有10多米的激光雷達,如果對于深色物體只有幾米的檢出率,那就容易導致機器定位和建圖出現問題,對后期的定位導航工作也會產生很大的影響。目前,激光雷達所標稱的距離大多以90%反光率
2018-02-02 14:06:27
主要內容本文提出了一種不依賴于棋盤格等輔助標定物體,實現像素級相機和激光雷達自動標定的方法。方法直接從點云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續邊。文中首先指出:以下四種
2021-09-01 07:42:19
,角度分辨率較低。圖中微波雷達(黑色)將無法區分這兩輛車,而激光雷達(紅色)可以。 對汽車激光雷達系統設計者來說,最關鍵的選擇之一是光波長。制約這一選擇的因素有幾個: · 對人類視覺的安全性 · 在
2018-09-10 14:10:45
說到機器人自主定位導航解決方案及技術,大家腦海里肯定會浮現“定位”、“建圖”、“避障”、“路徑規劃”等字眼。定位 在思嵐提供的自主定位導航解決方案中,主要是通過雷達和里程計的數據來進行定位。雖然
2018-03-28 15:48:15
誰能幫幫小弟我! 十分感謝! 要求:用c語言編寫一個自行車速度計和里程計! 基于芯片AT89C51,用霍爾元件測速度!用lcd1602顯示最好!不要求報警!能有一個開關暫停顯示!小弟的qq1252295329!!求大神高手指點一個
2013-04-16 20:01:46
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經
2018-01-25 09:38:47
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經擺放著
2018-01-26 09:19:09
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經
2018-01-25 09:36:04
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
2018-01-04 10:18:39
圍繞LR30進行感知環境,精確建圖和定位導航的功能研發,以實現低速自動駕駛輔助和封閉園區自動駕駛。二、已量產的固態激光雷達CE30-D當其他公司展位擺放著《樣品預約測試表》的時候,北醒的展臺上已經
2018-01-25 09:41:33
【新技術發布】基于深度神經網絡的激光雷達物體識別系統及其嵌入式平臺部署激光雷達可以準確地完成三維空間的測量,具有抗干擾能力強、信息豐富等優點,但受限于數據量大、不規則等難點,基于深度神經網絡
2021-12-21 07:59:18
基于深度神經網絡的激光雷達物體識別系統及其嵌入式平臺部署
2021-01-04 06:26:23
跪求基于載波激光雷達的水下目標探測技術的資料,要搞畢業論文。
2011-02-24 21:27:42
來檢測物體。激光雷達系統的視場 (FOV) 決定了激光雷達能夠捕捉到的圖像的寬度,因此該視場對于自動駕駛決策算法十分重要。擴大FOV的方法有很多種,其中之一就是利用機械掃描,使用電機幫助實現360度
2022-11-03 07:12:38
里程計工作原理是什么?汽車里程計的受擾現象有哪些?
2021-05-19 07:26:30
如何實現出租車里程計時系統設計?
2021-10-27 07:17:30
視覺慣性里程計 綜述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目錄里程計
2021-07-27 07:21:50
1、概述由于課題要求,需要設計一款適合于果園應用的激光雷達。因此采用單線掃描激光雷達和角度傳感器來設計能采集二維數據的激光雷達。關于數據的轉化的理論,我們可以查閱相關文獻。在此,只講基本的構造和程序
2021-11-12 08:15:02
本文檔的主要內容詳細介紹的是小米的2D激光雷達拆解圖和講解。
2023-09-22 08:07:45
單線激光雷達特點:結構簡單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達實際上就是一個高同頻激光脈沖掃描儀,加上一個一維旋轉掃描。單線激光雷達雖然原理簡單但是可以有效、高頻的測試物體的距離
2017-09-25 11:30:10
的具體姿勢視覺傳感器:結合激光雷達,做SLAM建圖圖源:Science Robotics其中,相信大家對這款激光雷達很眼熟,就是思嵐科技的 RPLIDAR A1。A1的應用,可以用來幫助盲人探測周圍物體
2021-11-12 14:12:43
`TFmini是北醒在推進激光雷達低成本化進程中里程碑式的一步。 產品配以獨特的光學、結構和電子設計,使得產品具有低成本、小體積和低功耗三大優點。 產品內置室內外各應用環境的適配算法,可保證產品在
2018-01-04 10:22:39
`TFmini是北醒在推進激光雷達低成本化進程中里程碑式的一步。 產品配以獨特的光學、結構和電子設計,使得產品具有低成本、小體積和低功耗三大優點。 產品內置室內外各應用環境的適配算法,可保證產品在
2018-01-11 09:22:38
廣泛的應用。 由于激光雷達可以形成精度高達厘米級的 3D 環境地圖, 因此在 ADAS 及無人駕駛系統中具有重要作用。激光雷達在無人駕駛中的作用路徑規劃,是解決無人車從起點到終點,走怎樣路徑
2017-10-23 17:51:41
經過拆解可以看出PIN型固態激光雷達除鏡頭外都有標準的量產元件可以選擇,門檻很低,成本也不高,未來可以取代傳統的低像素攝像頭。但與攝像頭比,激光雷達可以全天候全天時工作,雨雪霧霾,白天黑夜都能勝任。
2020-05-20 06:56:28
。相對于傳統的安防監控系統來說,基于激光雷達的安防監控方案在滿足客戶基礎的安全防護監控、報警功能的同時,更能夠提升客戶的深層次需求。激光雷達在安防監控領域逐步顯現出獨特、巨大的優勢。圖1:傳統安防監控系統
2020-02-29 17:03:44
同樣定位建圖效果的視覺技術,為什么不能說TA跟機器人才是更配的CP組合?下面,小嵐做了個簡單分析。 通過上圖可以看出:不可否認,視覺攝像頭在幫助機器人定位建圖方面的作用不可小覷,但激光雷達相比視覺
2019-02-15 15:12:28
較高,因此非常適合用于泊車。 激光雷達激光雷達是軍轉民的高精度雷達技術。在汽車領域的應用,主要是用于無人駕駛系統,通常將激光雷達放置于車頂或車身的前后左右,但目前多處于試驗階段。激光雷達是以激光為工作
2019-09-19 09:05:02
誰能幫幫小弟我! 十分感謝! 要求:用c語言編寫一個自行車速度計和里程計! 基于芯片AT89C51,用霍爾元件測速度!用lcd1602顯示最好!小弟的qq411694253!!求大神高手指點一個
2016-05-17 20:47:25
,然而其劣勢在于對靜止物體如隔離帶的探測較弱且目前技術落地成本高昂。由于激光雷達可廣泛應用于ADAS系統,例如自適應巡航控制(ACC)、前車碰撞警示(FCW)及自動緊急制動(AEB),因此吸引了不少具有
2017-09-06 11:36:58
提供給客戶,或提供系統級參考設計。而作為機器人的眼睛,激光雷達能夠幫助倉儲AGV在倉庫中自主避開障礙。目前用于倉儲AGV避障傳感器方案主要有:激光雷達、視覺傳感器(攝像頭)、紅外傳感器、超聲波傳感器等
2017-12-07 14:47:45
iphone12這個亮點不在5G上面,畢竟國內的一些廠商早就已配備,也不在顏色,重點在于配備了一顆激光雷達!先說一下這個激光雷達帶來的用途,最直接的就是能夠快速精準對焦,即使在晚上也能夠很好實現
2021-07-22 09:12:51
直接計算非相干檢測方式下所需最小光功率的方法。仿真結果表明,由該方法計算的最小光功率能夠更好地優化激光雷達系統的性能。關 鍵 詞 激光雷達; 最小接收功率; 探測概率; 虛警概率Abstract
2009-05-15 01:20:13
采用三角測距法達到足夠的精度,長距離激光雷達采用脈沖測距達到足夠的速度。#自動駕駛中激光雷達 自動駕駛中通常有多種雷達方式進行互補:視覺(單目+結構光、雙目、三目)雷達,激光雷達(單線、多線),微波
2018-09-10 14:21:58
SLAM 前端里程計做累加,可以配合高精地圖的圖匹配,做類似后端回環優化的方式,將GPS、激光雷達及已知地圖進行融合定位。3. 自動駕駛多對雙目視覺攝像頭SLAM方案這種方案成本低,更加考究的是算法,有很少
2019-05-09 04:41:09
周圍障礙物的距離,誤差僅為毫米級。商場導引導購機器人這是目前在商場里經常能看到的服務型機器人。該產品采用360度激光雷達掃描測距傳感器,可實現機器人自主同步建圖及定位導航,適用于室內陪護、酒店前臺、商場
2018-09-10 16:32:46
請問激光雷達和激光掃描儀的具體區別在哪兒?
2022-05-13 11:05:19
請問如何理解SLAM用到的傳感器輪式里程計IMU、雷達、相機的工作原理?
2021-10-09 08:52:46
激光雷達是如何產生的?激光雷達在自動駕駛領域有什么作用?
2021-06-17 07:31:54
的環境感知系統一般由多個傳感器組成,包括激光雷達、毫米波雷達、攝像頭、GPS 等。其中,攝像頭、毫米波雷達、激光雷達是無人駕駛汽車中最常用的三種環境感知解決方案。 攝像頭的優點是成本低廉,圖像算法
2017-08-21 14:54:32
建圖,路徑規劃、自主避障等任務,它是目前性能最穩定、可靠性最強的定位導航方法,且使用壽命長,后期改造成本低。 掃地機器人是目前單線激光雷達應用最廣泛的領域,激光雷達配合slam算法,可以讓掃地機
2018-12-10 14:55:39
請問各位大咖,激光雷達的測量距離能到多少?
2022-10-05 03:18:49
Innovusion團隊展示了最新的半固態激光雷達樣機Hi Def LiDAR。他是激光雷達與相機的融合, 分辨率可以達到300線以上,主攻方向是傳感器和傳感器融合技術,不涉及車輛的控制。
2017-12-13 12:42:27 6061
6061 移動底座和激光雷達與Cortex-A53平臺都是通過串口來通信的。在基于Cortex-A53處理器的平臺上處理激光雷達的掃描數據以及底座中采集的里程計數據,結合激光雷達的數據和里程計數據實現機器人的定位,并在定位的基礎上利用雷達掃描數據實現二維地圖構建。
2018-03-13 09:15:328952 
激光雷達因其可靠性目前仍是無人駕駛系統中最重要的傳感器,然而,在現實使用中,激光雷達并不是完美的,往往存在點云過于稀疏,甚至丟失部分點的問題,對于不規則的物體表面,使用激光雷達很難辨別其模式,在諸如大雨天氣這類情況下,激光雷達也無法使用。
2019-01-21 16:06:476784 但是,埃隆·馬斯克真的就將激光雷達踩在腳底了嗎?恰恰相反,他清楚地認識到視覺與激光雷達的優劣勢,同時不斷推動讓視覺方案做到本只能由激光雷達做到的事情。
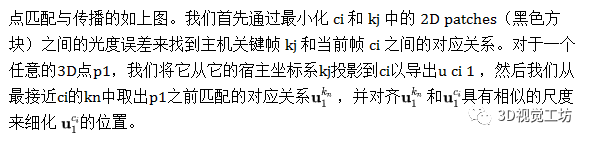
2020-09-23 16:30:227119 魯棒數據關聯是視覺里程計的核心問題,圖像間的對應關系為攝像機姿態和地圖估計提供了約束條件。目前最先進的直接和間接方法使用短期跟蹤來獲得連續的幀到幀約束,而長期約束則使用循環閉包來建立。在這篇論文
2020-10-28 08:00:00 0
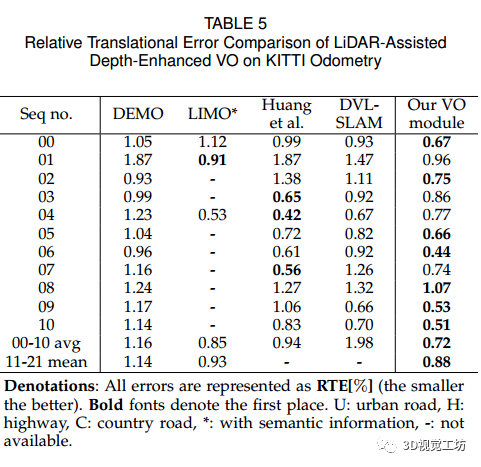
0 本文提出的立體視覺+慣導+激光雷達的SLAM系統,在比如隧道一些復雜場景下能夠實現良好性能。VIL-SLAM通過將緊密耦合的立體視覺慣性里程計(VIO)與激光雷達建圖和激光雷達增強視覺環路閉合相結合
2021-02-18 17:59:061949 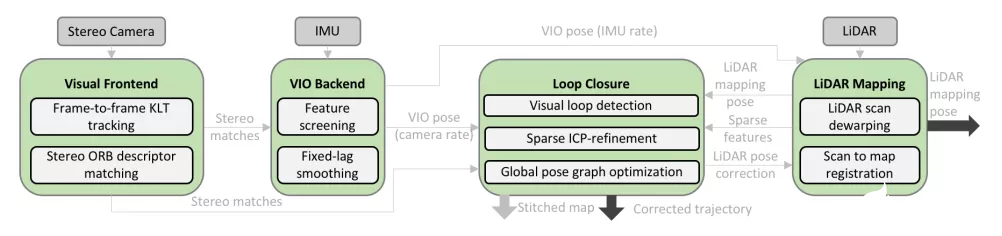
激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強等優勢。隨著科技的不斷發展,激光雷達的應用越來越
2021-03-30 16:37:008080 
VIO-SLAM Visual-Inertial Odometry(VIO)即視覺慣性里程計,有時也叫視覺慣性系統(VINS,visual-inertial system),是融合相機和IMU數據
2021-04-07 16:57:072163 
基于拉曼激光雷達的大氣水汽監測系統
2021-06-23 14:39:0027 激光雷達是什么? 激光雷達(英文:Lidar),激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強
2022-06-20 16:53:4122719 從全稱上可以看出,該算法是一個緊耦合的雷達慣導里程計(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM庫中的方法。
2022-09-14 10:11:011404 LIO-SAM 提出了一個利用GT-SAM的緊耦合激光雷達慣導里程計的框架。實現了高精度、實時的移動機器人的軌跡估計和建圖。
2022-10-31 09:25:491958 來自CMU Robotics Institute, 已知最早3D Laser與相機標定的工作(2005年),基于matlab的圖形用戶界面,進行激光雷達相機外參標定。
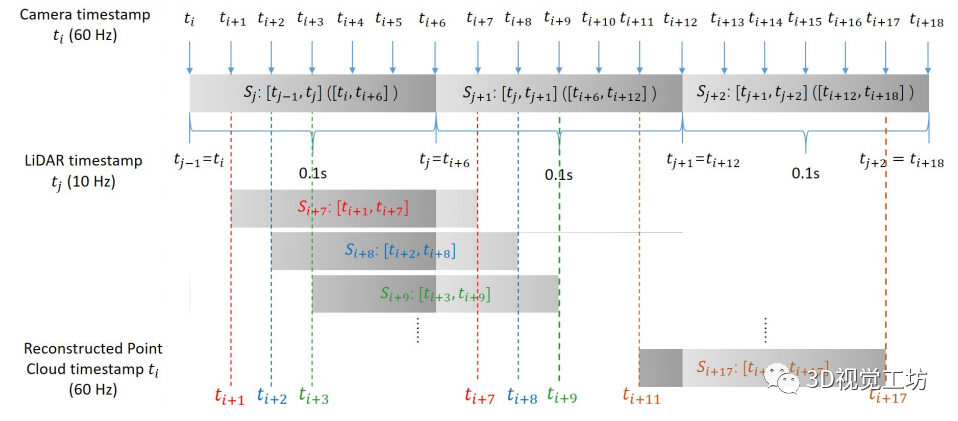
2022-11-10 14:59:262577 相機和激光雷達之間的時間戳同步問題一直是實時跑SLAM的先決條件。本文試圖以最清晰的思路去講明白這個事情。
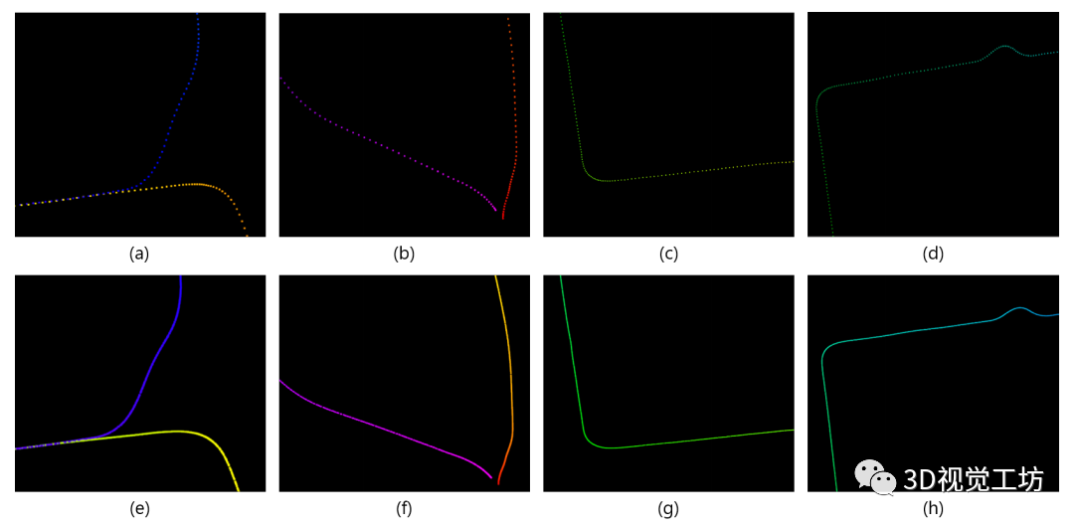
2022-11-28 16:08:041158 本文提出了一種新的直接視覺里程計算法,利用360度相機實現魯棒的定位和建圖。本系統使用球面相機模型來處理無需校正的等距柱狀圖像,擴展稀疏直接法視覺里程計(DSO,direct sparse odometry),從而實現全方位感知。
2022-12-14 14:53:43512 方案(ORB SLAM)、基于激光雷達的里程計方案(Hector SLAM)、基于IMU的里程計方案,以及多傳感器融合的方案。
2023-04-19 10:17:521062 激光雷達即激光探測及測距系統,是通過發射激光束來探測目標位置、速度等特征量的雷達系統。按掃描維度,激光雷達可分為一維激光雷達、二維激光雷達和三維激光雷達。
2023-05-10 09:58:335397 
基于3D激光雷達的安全系統具有更高的可靠性,減少了誤報,因此具有更高級別的安全性。激光雷達在安全和監視應用中越來越受歡迎,由于其高可靠性、遠程、厘米級精度以及對具有挑戰性的天氣和照明條件不敏感等特點,它很容易擊敗相機或雷達等同行。
2023-05-29 09:53:31296 
(2022年6月14日,北京)北醒CEO李遠博士受邀出席由愛集微舉辦的主題為“解讀純視覺與激光雷達之爭背后的產業邏輯”的圓桌論壇活動,圍繞當前在自動駕駛領域中,純視覺與激光雷達方案之爭的熱點議題以及
2022-06-24 14:32:51372 
自動駕駛的角度來看,說到近兩年哪一個主題最熱門,肯定離不開激光雷達。2021年被譽為激光雷達量產之年,不少車企都公布了裝備“車規級”激光雷達車型量產日期。然而何為“車規級”激光雷達?激光雷達產業人士
2023-02-08 14:52:251758 
音圈模組激光雷達為汽車開啟“視覺外掛”。眾所周知,近兩年來,車載激光雷達越來越多。那么汽車裝這東西究竟有多大用處,難不成還能像二郎神開了“三只眼”?其實答案有些相似,禾賽科技的激光雷達確實能夠為汽車
2023-07-10 08:37:35253 晶振是激光雷達系統中的重要組成部分,對于保證激光雷達的測距精度和穩定性起著重要作用。
2023-10-30 17:48:14289 單線激光雷達和多線激光雷達區別? 單線激光雷達和多線激光雷達是兩種常用的激光雷達技術。它們在激光的發射方式、數據采集、成像分辨率和應用場景等方面存在著很大的區別。 首先,單線激光雷達是指激光雷達
2023-12-07 15:48:331851 今日,全球激光雷達領導者禾賽科技宣布,公司自成立以來激光雷達累計交付量突破30 萬臺,成為全球首個創下此里程碑的車載激光雷達公司。 ? 自 2022 年 7 月正式開啟前裝量產以來,禾賽的激光雷達
2023-12-27 09:44:05273 
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論