相比于單目視覺(jué),雙目視覺(jué)(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對(duì)同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。
2016-11-05 03:46:28 3097
3097 據(jù)麥姆斯咨詢報(bào)道,物聯(lián)網(wǎng)及雙目視覺(jué)專家鉅芯發(fā)布了一款智能雙目立體視覺(jué)系統(tǒng),以及業(yè)內(nèi)首顆智能雙目立體視覺(jué)芯片eagleye100。
2017-10-26 10:26:219961 其使用的算法復(fù)雜。被動(dòng)測(cè)距按照使用的視覺(jué)傳感器數(shù)量可分為單目視覺(jué)、雙目立體視覺(jué)和多目視覺(jué)三大類。 (1)單目視覺(jué) 單目視覺(jué)是指僅利用一臺(tái)照相機(jī)拍攝一張相片來(lái)進(jìn)行測(cè)量。因僅需要一臺(tái)相機(jī),所以該方法
2020-12-01 15:08:04
傳感器技術(shù)增添了哪些助力?作為汽車(chē)領(lǐng)域的業(yè)界翹楚,博世又將如何助推自動(dòng)駕駛技術(shù)走向商用? 物聯(lián)網(wǎng)為汽車(chē)MEMS傳感器帶來(lái)重大利好 回溯傳感器的發(fā)展歷史,從上世紀(jì)80年代~90年代在汽車(chē)電子中應(yīng)用是
2014-08-18 10:04:20
近年來(lái)隨著物聯(lián)網(wǎng)、智能手機(jī)、汽車(chē)電子、醫(yī)療電子等產(chǎn)業(yè)的快速發(fā)展,對(duì)陀螺儀、加速度傳感器、MEMS麥克風(fēng)等傳感器件的需求不斷增加,傳感器產(chǎn)業(yè)進(jìn)入快速發(fā)展階段。傳感器市場(chǎng)的需求方向是什么?未來(lái)的技術(shù)走向如何?中國(guó)傳感器產(chǎn)業(yè)的優(yōu)劣勢(shì)何在?應(yīng)如何健康發(fā)展?日前,各方專家就上述問(wèn)題進(jìn)行了深入探討。
2020-04-23 06:34:13
`雙目立體視覺(jué)原理大揭秘(一)——雙目視覺(jué)導(dǎo)航、定位;雙目立體視覺(jué)是一門(mén)有著廣闊應(yīng)用前景的學(xué)科,根據(jù)雙目立體視覺(jué)CCAS提供的思路及組成原理,隨著光學(xué)、電子學(xué)以及計(jì)算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸
2013-11-21 16:20:51
將成為工業(yè)檢測(cè)、生物醫(yī)學(xué)、虛擬現(xiàn)實(shí)等領(lǐng)域的關(guān)鍵技術(shù),還有可能應(yīng)用于航天遙測(cè)、軍事偵察等領(lǐng)域。目前在國(guó)外,雙目體視技術(shù)已廣泛應(yīng)用于生產(chǎn)、生 活中。雙目立體視覺(jué)是計(jì)算機(jī)視覺(jué)的一個(gè)重要分支,單從雙目視覺(jué)
2013-11-21 16:22:03
雙目立體視覺(jué)(BinocularStereoVision)是機(jī)器視覺(jué)的一種重要形式,因其可簡(jiǎn)單地利用左右攝像機(jī)中的圖像信息計(jì)算得到相機(jī)視野中物體相對(duì)于攝像機(jī)的深度信息使得該技術(shù)擁有廣泛的應(yīng)用前景
2021-12-23 07:19:52
僅能獲取建/構(gòu)筑物模型表面固定位置點(diǎn)的一維信息,難以反映建/構(gòu)筑物模型健康監(jiān)測(cè)過(guò)程中的三維動(dòng)態(tài)變化;3、接觸式傳感器在建/構(gòu)筑物模型健康監(jiān)測(cè)的過(guò)程中極易遭到損壞,造成巨大的經(jīng)濟(jì)浪費(fèi)。 而通過(guò)雙目立體視覺(jué)
2016-03-03 09:36:59
智能傳感器技術(shù)-隨著半導(dǎo)體集成技術(shù)的發(fā)展,微處理器和存儲(chǔ)器不斷進(jìn)步,敏感元件與信號(hào)處理電路有可能集成在同一芯片上,故智能傳感器將成為現(xiàn)實(shí)。智能化傳感器是一種帶微處理器的,兼有信息檢測(cè)、信息處理、信息記憶、邏輯思維與判斷功能的傳感器。以下重點(diǎn)探討智能傳感器的應(yīng)用和發(fā)展。
2020-04-20 07:24:17
請(qǐng)問(wèn)下智能傳感器具有哪些功能?智能傳感器主要有哪些應(yīng)用?
2021-07-08 07:30:39
的全球交通網(wǎng)絡(luò),同時(shí)重新制定交通基礎(chǔ)設(shè)施,車(chē)輛所有權(quán)等規(guī)則。IHS Automotive最新預(yù)測(cè)顯示,在物聯(lián)網(wǎng)(IoT)連接、處理能力和機(jī)器視覺(jué)等必要技術(shù)發(fā)展的關(guān)鍵時(shí)期,到2035年全球自動(dòng)駕駛汽車(chē)將有近
2022-11-09 08:03:50
智能傳感器是如何定義的?智能傳感器有哪些分類?智能傳感器的通信接口有哪些類型?
2021-06-10 09:34:41
傳感器被稱為電子設(shè)備的五官,作用非常大,但傳統(tǒng)傳感器對(duì)數(shù)據(jù)的處理能力有限,并不能滿足很多場(chǎng)景下的高數(shù)據(jù)、高運(yùn)算要求。隨著人工智能技術(shù)的發(fā)展,智能傳感器成為了一種新的市場(chǎng)需求。
2020-08-04 07:38:33
、科技和工農(nóng)業(yè)生產(chǎn)等各個(gè)領(lǐng)域。以微機(jī)電系統(tǒng)技術(shù)為基礎(chǔ)的智能傳感器代表了傳感器的主要發(fā)展方向,其技術(shù)的進(jìn)步不僅可以提高產(chǎn)品智能化水平,還可推動(dòng)中國(guó)制造向中國(guó)智造的發(fā)展。
2020-08-18 06:31:31
智能視覺(jué)傳感器一般由圖像采集單元、圖像處理單元、圖像處理軟件、網(wǎng)絡(luò)通信裝置等構(gòu)成。
2019-10-25 09:11:21
1、智能駕駛域控制器的SoC芯片選型隨著智能駕駛行業(yè)的發(fā)展,智能駕駛功能日益復(fù)雜,領(lǐng)航高速輔助、領(lǐng)航城區(qū)輔助、跨層記憶泊車(chē)等功能逐漸落地。智能駕駛系統(tǒng)對(duì)傳感器、算力需求日益旺盛。智能駕駛系統(tǒng)既需要
2022-08-11 15:55:37
工業(yè)自動(dòng)化與人工智能息息相關(guān),也與機(jī)器視覺(jué)息息相關(guān)。機(jī)器視覺(jué)技術(shù)可說(shuō)是人工智能的分支技術(shù),是全球智能化的“慧”眼圖像傳感器,影響著很多應(yīng)用的發(fā)展與增展,包括工業(yè)自動(dòng)化、機(jī)器人、安防/監(jiān)控、智能
2019-08-01 07:11:17
機(jī)器人視覺(jué)傳感器詳解一種新型的工業(yè)機(jī)器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點(diǎn)是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯阏J(rèn)真了解過(guò)它嗎?
2020-08-14 07:24:17
目前傳感器應(yīng)用很廣泛,而隨著技術(shù)的成熟,科學(xué)的進(jìn)步,各種產(chǎn)品也是在向智能化發(fā)展,比如說(shuō)傳感器就進(jìn)行了升級(jí),智能溫濕度傳感器的出現(xiàn),讓傳感器的功能被更好的發(fā)揮出來(lái)。
2020-08-14 06:15:36
目前傳感器應(yīng)用很廣泛,而隨著技術(shù)的成熟,科學(xué)的進(jìn)步,各種產(chǎn)品也是在向智能化發(fā)展,比如說(shuō)傳感器就進(jìn)行了升級(jí),智能溫濕度傳感器的出現(xiàn),讓傳感器的功能被更好的發(fā)揮出來(lái)。
2020-08-14 06:43:14
智能熱傳感器是什么?智能熱傳感器如何與微控制器結(jié)合使用?為什么流行的存在傳感器通常不是最佳的感測(cè)模式?
2021-06-15 06:30:58
視覺(jué)傳感技術(shù)是傳感技術(shù)七大類中的一個(gè),視覺(jué)傳感器是指通過(guò)對(duì)攝像機(jī)拍攝到的圖像進(jìn)行圖像處理,來(lái)計(jì)算對(duì)象物的特征量(面積、重心、長(zhǎng)度、位置等),并輸出數(shù)據(jù)和判斷結(jié)果的傳感器。視覺(jué)傳感器是整個(gè)機(jī)器視覺(jué)
2020-08-05 07:53:42
視覺(jué)傳感技術(shù)是傳感技術(shù)七大類中的一個(gè),視覺(jué)傳感器是指通過(guò)對(duì)攝像機(jī)拍攝到的圖像進(jìn)行圖像處理,來(lái)計(jì)算對(duì)象物的特征量(面積、重心、長(zhǎng)度、位置等),并輸出數(shù)據(jù)和判斷結(jié)果的傳感器。視覺(jué)傳感器是整個(gè)機(jī)器視覺(jué)
2020-08-12 07:33:53
根據(jù)工業(yè)和信息化部、公安部、交通運(yùn)輸部等三部委共同發(fā)布的《智能網(wǎng)聯(lián)汽車(chē)道路測(cè)試管理規(guī)范(試行)》,自動(dòng)駕駛汽車(chē)是指搭載先進(jìn)的車(chē)載傳感器、控制器、執(zhí)行器等裝置,并融合現(xiàn)代通信與網(wǎng)絡(luò)技術(shù),實(shí)現(xiàn)車(chē)與人、車(chē)
2020-08-14 07:08:52
輔助系統(tǒng)。根據(jù)峰會(huì)主持人描述,無(wú)論是自動(dòng)駕駛還是基礎(chǔ)的V2V,都離不開(kāi)先進(jìn)駕駛輔助系統(tǒng)。 意法半導(dǎo)體公司就在其圖像傳感器產(chǎn)品中加入了一系列智能功能。目前該公司正在開(kāi)發(fā)一款黑白圖像傳感器,但能對(duì)紅色光線有感知能力,其將用于檢測(cè)交通信號(hào)燈、前車(chē)尾燈。
2020-08-27 06:41:10
。美國(guó)國(guó)家公路交通安全管理局(NHTSA)正在考慮設(shè)置自動(dòng)駕駛專用車(chē)道。有許多討論是關(guān)于如何加快自動(dòng)駕駛技術(shù)的大量應(yīng)用,基于CMOS圖像傳感器的視覺(jué)系統(tǒng)將成為實(shí)現(xiàn)此目標(biāo)的關(guān)鍵因素。
2020-06-02 08:00:00
GHz 雷達(dá)系統(tǒng)參考設(shè)計(jì)五、世強(qiáng)高級(jí)汽車(chē)環(huán)視輔助駕駛系統(tǒng)(ADAS)方案……雙目視覺(jué)ADAS解決方案通過(guò)文檔,可了解以下內(nèi)容:一、雙目視覺(jué) ADAS 芯片-S32V234二、雙目視覺(jué) ADAS 的優(yōu)勢(shì)三、雙目視覺(jué)的測(cè)距步驟四、雙目視覺(jué) ADAS 的應(yīng)用五、雙目視覺(jué) ADSA 的解決方案六、總結(jié)
2020-06-02 15:09:59
傳感器作為信號(hào)采集和機(jī)電轉(zhuǎn)換的器件,其機(jī)電技術(shù)已相當(dāng)成熟,近幾年來(lái),傳感器技術(shù)向小型化、智能化、多功能化、低成本化大踏步邁進(jìn)。光敏傳感器、紅外傳感器等各種類型的傳感器都可與LED照明燈具組成一個(gè)智能
2019-07-12 08:11:12
` 本帖最后由 sszx2007 于 2020-3-2 17:04 編輯
LabVIEW雙目視覺(jué)原創(chuàng) 張冬斌 LabVIEW逆向工程高級(jí)編程 轉(zhuǎn)載至:https
2020-03-02 17:03:12
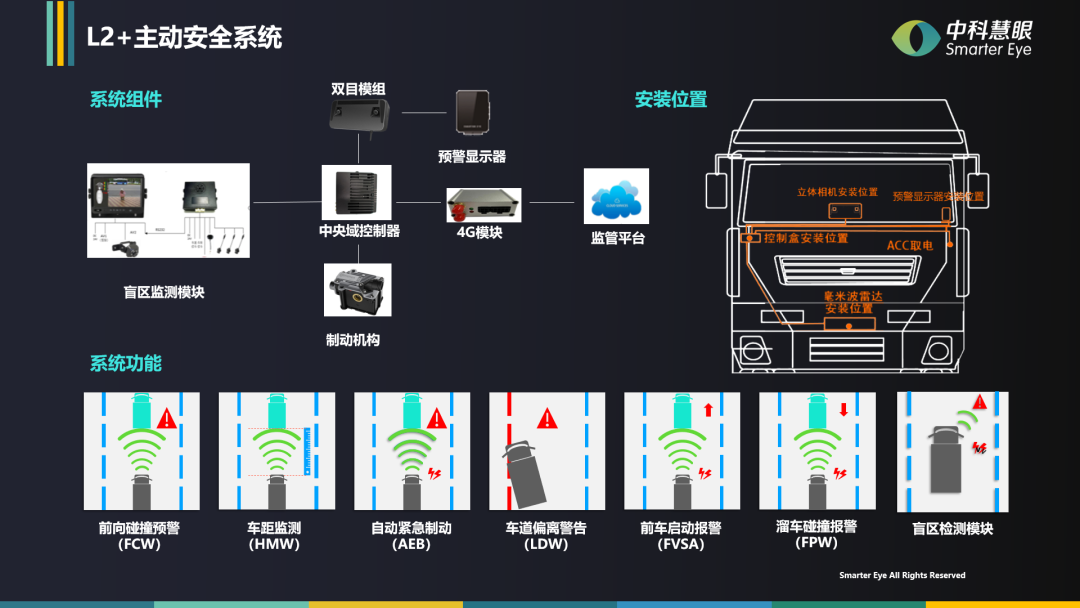
挑戰(zhàn),包括激光雷達(dá)、單目測(cè)距和雙目視覺(jué)技術(shù)等。在當(dāng)前的高級(jí)輔助駕駛技術(shù)(ADAS)中,雙目視覺(jué)技術(shù)在距離檢測(cè)方面表現(xiàn)出色,它可以精確地測(cè)量物體的距離,提供更客觀的數(shù)據(jù)。
為了應(yīng)對(duì)這一需求,設(shè)計(jì)了一種
2023-12-19 18:02:07
大佬們好我有一定的Labview基礎(chǔ),然而對(duì)Labview的雙目視覺(jué)測(cè)量所知甚少,現(xiàn)在有一個(gè)需求,就是在比較小的空間內(nèi)實(shí)現(xiàn)微米級(jí)的三維動(dòng)態(tài)測(cè)量,想知道通過(guò)Labview雙目視覺(jué)有實(shí)現(xiàn)的可能性嗎?希望大佬們多多指導(dǎo)。感激不盡!謝謝!
2020-07-21 21:50:21
。 在智能汽車(chē)時(shí)代,主動(dòng)安全技術(shù)成為備受矚目的新興領(lǐng)域,側(cè)翻(rollover)與穩(wěn)定性控制(ESC)是對(duì)當(dāng)今主動(dòng)安全系統(tǒng)的全新改進(jìn)。這就需要MEMS加速度傳感器和角速度傳感器來(lái)感測(cè)車(chē)身姿態(tài)。“由于
2014-08-08 11:08:12
申請(qǐng)理由:之前用wrtnode的u***接雙攝像頭外加一個(gè)么mcu實(shí)現(xiàn)過(guò)一個(gè)一個(gè)雙目視覺(jué)隨動(dòng)平臺(tái),這樣太麻煩了,希望能用這個(gè)來(lái)實(shí)現(xiàn)一個(gè)更簡(jiǎn)單的解決方案。項(xiàng)目描述:u***接雙攝像頭,mcu控制云臺(tái)。通過(guò)WIFI將雙目視覺(jué)傳遞到手機(jī)進(jìn)行顯示,同時(shí)將手機(jī)的角度信息返回,控制云臺(tái)轉(zhuǎn)動(dòng)。
2015-09-10 11:25:10
較低圖像精度以及數(shù)據(jù)穩(wěn)定性的問(wèn)題,因此需要和超聲、紅外等其它類型傳感器共同工作。雙目視覺(jué)技術(shù),是一種模擬人類雙眼處理環(huán)境信息的方式,通過(guò)兩個(gè)攝像機(jī)從外界采集一副或者多幅不同視角的圖像,從而建立被測(cè)物體
2019-07-25 07:30:00
雙目視覺(jué)的原理:由于視差原理,左右兩個(gè)ccd的位置固定,若能測(cè)量空間中同一個(gè)點(diǎn)P在左右兩個(gè)ccd中圖像的位置,則根據(jù)三角原理,可以求得P點(diǎn)在空間中的坐標(biāo)位置。可用于攝像頭實(shí)現(xiàn)空間點(diǎn)的距離測(cè)量。下圖
2021-09-27 16:52:18
什么是傳感器技術(shù)?傳感器技術(shù)有哪些應(yīng)用?
2021-05-28 06:10:11
多傳感器信息融合技術(shù)綜合了概率統(tǒng)計(jì)、信號(hào)處理、人工智能、控制理論等多個(gè)學(xué)科的最新科研成果,為機(jī)器人精確、全面、實(shí)時(shí)地感知各種復(fù)雜的、動(dòng)態(tài)的、不確定的未知環(huán)境提供了一種先進(jìn)的技術(shù)手段。在研究基于多
2020-08-18 07:43:38
`傳感器被認(rèn)為是現(xiàn)代信息技術(shù)的三大支柱之一同時(shí)也是當(dāng)前各發(fā)達(dá)國(guó)家競(jìng)相發(fā)展的高新技術(shù)。隨著科技的發(fā)展,傳感器正向微型化、多功能化、智能化方向發(fā)展,目前傳感器的廣泛應(yīng)用正推動(dòng)包括無(wú)人駕駛在內(nèi)的汽車(chē)產(chǎn)業(yè)以
2018-01-04 15:38:55
、計(jì)算機(jī)、人工智能、傳感器、通訊與網(wǎng)絡(luò)等多個(gè)學(xué)科和領(lǐng)域?yàn)榇恚嵌喾N高新技術(shù)發(fā)展成果的綜合集成,因此,它的發(fā)展與眾多學(xué)科發(fā)展密切相關(guān),代表了高科技發(fā)展的前沿。隨著電子技術(shù)的不斷發(fā)展,人們發(fā)明了各式各樣的具有感知,決策,行...
2021-08-09 09:37:34
雙目視覺(jué)智能平臺(tái)概述硬件資源1 FMC 雙目MIPI模塊FL0214FL0214模塊的參數(shù)說(shuō)明 FL0214模塊的結(jié)構(gòu)圖FL0214模塊原理框圖模塊FMC LPC的引腳分配
2021-01-01 06:18:17
API的支持增強(qiáng)了算法的可移植性;而符合ISO26262標(biāo)準(zhǔn)的功能安全設(shè)計(jì)使得芯片能夠滿足ADAS系統(tǒng)對(duì)安全性的嚴(yán)苛需求。S32V234支持包括雙目視覺(jué)在內(nèi)的多種視覺(jué)ADAS和傳感器數(shù)據(jù)融合解決方案,使得我們?cè)谕ㄍ鶡o(wú)人駕駛的道路上邁出堅(jiān)實(shí)的一步。`
2017-08-12 15:15:52
利用LABVIEW視覺(jué)模塊完成攝像機(jī)標(biāo)定,一般需要哪些vi?相關(guān)參數(shù)怎么設(shè)置?
2015-05-17 17:24:58
ANSYS SPEOS介紹ANSYS VRXPERIENCE介紹基于物理特性的智能駕駛傳感器高精度仿真
2020-12-15 07:15:06
ITS所需要的重要駕駛支持系統(tǒng)包括哪些方面?如何利用毫米波雷達(dá)和圖像傳感器構(gòu)建智能駕駛控制系統(tǒng)?環(huán)境識(shí)別技術(shù)在汽車(chē)中的應(yīng)用是什么?
2021-05-17 06:35:07
(Odometry)視覺(jué)里程計(jì)(Visual Odometry)單目視覺(jué)里程計(jì)(monocular Visual Odometry)雙目視覺(jué)里程計(jì)(stereo Visual Odometry)視覺(jué)慣性里程計(jì)(visual-inertial Odometry)輪式里程計(jì)odometry 編碼器 編碼輪encoder多傳...
2021-07-27 07:21:50
視覺(jué)傳感器是一種機(jī)器視覺(jué)系統(tǒng),經(jīng)過(guò)專門(mén)設(shè)計(jì),用于在非結(jié)構(gòu)化環(huán)境中執(zhí)行簡(jiǎn)單的存在/缺失檢測(cè),并提供通過(guò)/未通過(guò)結(jié)果。視覺(jué)傳感器將相機(jī)的圖像采集功能與計(jì)算機(jī)的處理能力相結(jié)合,能夠?qū)λ圃斓脑虍a(chǎn)品的位置、質(zhì)量和完整性作出決策。
2020-08-17 06:06:43
性能的要求越來(lái)越高,數(shù)量越來(lái)越大,因此研究集成高性能的傳感器對(duì)促進(jìn)相關(guān)技術(shù)的發(fā)展是很有實(shí)際意義的。 目前世界上一些智能傳感器(Smart Sensor)一般都是用單片機(jī)+控制規(guī)則進(jìn)行控制的,智能性不高
2019-07-09 06:03:54
r隨著功能越來(lái)越強(qiáng)大的處理器、圖像傳感器、存儲(chǔ)器和其他半導(dǎo)體器件以及相關(guān)算法的出現(xiàn),可以在多種嵌入式系統(tǒng)中實(shí)現(xiàn)計(jì)算機(jī)視覺(jué)功能,通過(guò)視頻輸入來(lái)分析周?chē)h(huán)境。微軟的Kinect游戲控制器
2019-08-22 06:43:16
怎么實(shí)現(xiàn)單目視覺(jué)車(chē)道偏離報(bào)警系統(tǒng)的設(shè)計(jì)?
2021-05-13 06:06:39
平臺(tái)的設(shè)計(jì)直接決定了無(wú)人駕駛對(duì)環(huán)境的感知能力、計(jì)算性能與能耗、魯棒性、安全性等。無(wú)人駕駛的硬件平臺(tái)又分為傳感器平臺(tái)、計(jì)算平臺(tái)、以及控制平臺(tái)三大部分。由于篇幅的問(wèn)題,整個(gè)硬件平臺(tái)將被拆分為兩個(gè)部分,本文
2017-09-30 16:50:53
什么是“ToF”?“ToF”也就是所謂的飛行時(shí)間(Time of Flight)技術(shù),即傳感器發(fā)出經(jīng)調(diào)制的近紅外光,遇物體后反射,傳感器通過(guò)計(jì)算光線發(fā)射和反射時(shí)間差或相位差,來(lái)?yè)Q算被拍攝景物的距離
2021-02-23 11:16:32
傳感器正用于汽車(chē)中,這導(dǎo)致了自主駕駛的方式。今天的原始數(shù)據(jù)傳感器可以結(jié)合健康監(jiān)控功能,遠(yuǎn)程并自主地監(jiān)控故障,節(jié)省處理器資源并提供額外的系統(tǒng)保護(hù)層。這使得這些“健康智能”模塊可更容易地部署未來(lái)車(chē)輛所需的更多
2019-07-30 04:45:09
包含的設(shè)備選型、系統(tǒng)搭建、圖像獲取、立體匹配,并給出標(biāo)定結(jié)果,在用戶需要進(jìn)行開(kāi)發(fā)的特征捕捉部分,也給予了豐富的支持。雙目標(biāo)定可以說(shuō)是整套雙目視覺(jué)系統(tǒng)的最關(guān)鍵技術(shù),能夠快速準(zhǔn)確的完成匹配和標(biāo)定并給出測(cè)量
2016-01-19 16:59:12
特斯拉在五月份發(fā)生的自動(dòng)駕駛事故,和最近在Defcon上演示的如何干擾傳感器,都充分說(shuō)明了傳感器在自動(dòng)駕駛中的重要性:環(huán)境感知是自動(dòng)駕駛實(shí)現(xiàn)的基礎(chǔ),如果不能正確地感知周?chē)h(huán)境,那么接下來(lái)的認(rèn)知、決策與控制,都是空中樓臺(tái)。
2020-05-14 07:34:45
自動(dòng)駕駛定位技術(shù)就是解決“我在哪兒”的問(wèn)題,并且對(duì)可靠性和安全性提出了非常高的要求。除了GPS與慣性傳感器外,我們通常還會(huì)使用LiDAR點(diǎn)云與高精地圖匹配,以及視覺(jué)里程計(jì)算法等定位方法,讓各種定位法
2019-05-09 04:41:09
。就像人類一樣,在機(jī)器人的眾多感知傳感器中,視覺(jué)系統(tǒng)提供了大部分機(jī)器人所需的外部相 界信息。因此視覺(jué)系統(tǒng)在機(jī)器人技術(shù)中具有重要的作用。單目視覺(jué)單目視覺(jué),單目視覺(jué)系統(tǒng)只使用一個(gè)視覺(jué)傳感器。單目視覺(jué)系統(tǒng)在
2018-12-13 21:23:57
從傳感器技術(shù)發(fā)展本身來(lái)說(shuō),要在接下來(lái)十年里保證自動(dòng)駕駛車(chē)安全地上路,硬件性能與背后的軟件算法,以及不同傳感器之間的數(shù)據(jù)融合,都是需要提升的地方。
2020-05-18 06:11:57
1 引言視覺(jué)檢測(cè)技術(shù)是以機(jī)器視覺(jué)為基礎(chǔ)的新型測(cè)試技術(shù),因其具有測(cè)量非接觸、速度快、信息量大、應(yīng)用領(lǐng)域?qū)拸V等特點(diǎn)而受到歡迎。結(jié)構(gòu)光傳感器是應(yīng)用較早、發(fā)展較成熟的視覺(jué)傳感器,因此本系統(tǒng)采用結(jié)構(gòu)光傳感器來(lái)
2019-07-05 06:22:19
基于DM642的機(jī)器人雙目視覺(jué)系統(tǒng)設(shè)計(jì)
2021-04-02 07:20:41
根據(jù)雙目視覺(jué)傳感器的工作原理, 分析了影響測(cè)量精度的因素, 表明雙目視覺(jué)傳感器的物體空間坐標(biāo)與圖像坐標(biāo)之間存在復(fù)雜的非線性映射關(guān)系, 其數(shù)學(xué)模型無(wú)法用解析式精確地加以
2009-07-10 15:53:11 11
11 對(duì)于基于圖像的具有手眼或固定攝像機(jī)模式的雙目視覺(jué)伺服控制系統(tǒng),考慮機(jī)器人的運(yùn)動(dòng)學(xué)特性,在攝像機(jī)的內(nèi)外參數(shù)部分未知的情況下,給出了一種直接自適應(yīng)控制器實(shí)現(xiàn)定位
2010-01-11 15:57:3118 本文主要從控制角度出發(fā),針對(duì)手眼機(jī)器人雙目視覺(jué)伺服控制問(wèn)題,利用變結(jié)構(gòu)控制理論設(shè)計(jì)了視覺(jué)伺服控制器,同時(shí)用自適應(yīng)估計(jì)的方法對(duì)深度進(jìn)行估計(jì),基于圖像誤差實(shí)現(xiàn)了定
2010-01-13 14:43:2719 文章介紹了一種以TMS320DM642 為核心,結(jié)合編解碼芯片SAA7115 和SAA7105 組成的高速圖像處理系統(tǒng),和典型的電機(jī)控制芯片TMS320F2812 為核心的電機(jī)控制系統(tǒng),組成了基于雙目視覺(jué)的跟蹤機(jī)
2010-01-18 15:28:3828 提出一種新的三維坐標(biāo)測(cè)量方法,該方法基于雙目視覺(jué)、雙頻光柵投影、相移和三角測(cè)量等測(cè)量方法。測(cè)量系統(tǒng)采用兩個(gè)攝像機(jī)記錄投影光柵,通過(guò)分析雙頻投影條紋不同柵距的
2010-01-22 12:10:3820 雙日視覺(jué)是計(jì)算機(jī)視覺(jué)領(lǐng)域的一個(gè)重要組成部分。雙目視覺(jué)研究中的關(guān)鍵技術(shù)攝像機(jī)標(biāo)定和立體匹配一直是研究的熱點(diǎn)。本文由兩部分組成,分別對(duì)雙目視覺(jué)的算法和未標(biāo)定圖
2010-08-14 16:41:540 視覺(jué)傳感器的標(biāo)定技術(shù)
雙目視覺(jué)傳感器由兩臺(tái)性能相同的面陣CCD攝像機(jī)組成,基于立體視差的原理,可完
2009-11-07 11:42:011723 本內(nèi)容基于ADSP-BF548處理器設(shè)計(jì)實(shí)現(xiàn)了具有結(jié)構(gòu)光雙目視覺(jué)的四足可變形仿生機(jī)器人系統(tǒng)
2011-08-31 17:42:15144 根據(jù)雙目立體視覺(jué)傳感器三角立體視差模型,建立了結(jié)構(gòu)參數(shù)誤差的傳遞函數(shù),分析了雙目視覺(jué)傳感器結(jié)構(gòu)參數(shù)及其誤差傳遞規(guī)律對(duì)傳感器綜合測(cè)量精度的影響,得出了結(jié)構(gòu)參數(shù)的合理
2011-09-06 14:38:4075 本文以遺視投影變換為依據(jù),針對(duì)多視覺(jué)傳感器檢測(cè)系統(tǒng)中的雙目視覺(jué)傳感器,建立了雙目視覺(jué)傳感器測(cè)量空間三維坐標(biāo)的模型.事先確定攝像機(jī)的部分不易變化的參數(shù),其它參數(shù)在攝
2012-03-02 16:02:1315 雙目視覺(jué)是利用機(jī)器視覺(jué)進(jìn)行障礙物檢測(cè)的研究熱點(diǎn)。針對(duì)雙目視頻不同步,導(dǎo)致立體匹配不精準(zhǔn)的問(wèn)題,提出了一種基于圖像處理的雙目校準(zhǔn)算法。算法首先根據(jù)道路的先驗(yàn)特征模型,建立視覺(jué)校準(zhǔn)的敏感區(qū)域,以減小
2015-12-18 16:26:5734 電子開(kāi)發(fā)機(jī)器人相關(guān)教程資料——全自主機(jī)器人雙目視覺(jué)運(yùn)動(dòng)檢測(cè)
2016-09-06 16:42:430 全自主機(jī)器人垂直異構(gòu)雙目視覺(jué)研究,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:15:050 基于雙目視覺(jué)伺服反饋的非完整移動(dòng)機(jī)器人軌跡跟蹤_王寶磊
2017-03-16 09:17:261 問(wèn)題,、提出一種基于雙目視覺(jué)的投影儀標(biāo)定算法,將投影儀視為逆向相機(jī),利用一個(gè)輔助相機(jī)捕獲投影于不同位置標(biāo)定平面,確立攝像機(jī)圖像與標(biāo)定平面之間的對(duì)應(yīng)關(guān)系,然后利用極線原理得到攝像機(jī)圖像與投影儀圖像之間的對(duì)應(yīng)關(guān)
2017-11-06 15:30:2120 雙目視覺(jué)導(dǎo)航敏感器BVS逐漸成為各國(guó)航天最新領(lǐng)域的研制熱點(diǎn)。雙目立體視覺(jué)是由不同位置的兩臺(tái)或者一臺(tái)攝像機(jī)經(jīng)過(guò)移動(dòng)或旋轉(zhuǎn)拍攝同一幅場(chǎng)景,通過(guò)各種算法匹配出相應(yīng)像點(diǎn),從而計(jì)算出視差,然后基于三角測(cè)量
2018-01-25 14:00:160 自動(dòng)駕駛技術(shù)涉及的環(huán)境感知傳感器主要包括視覺(jué)類攝像機(jī)(包括單目、雙目立體視覺(jué)、全景視覺(jué)及紅外相機(jī))和雷達(dá)類測(cè)距傳感器(激光雷達(dá)、毫米波雷達(dá)、超聲波雷達(dá)等)。
2018-06-14 11:21:397384 
的逐步成熟,人機(jī)協(xié)作的不斷深入發(fā)展,機(jī)器人產(chǎn)品應(yīng)用不斷擴(kuò)展,全球機(jī)器人將迎來(lái)新一輪的增長(zhǎng)。 自創(chuàng)立之初,INDEMIND便一直致力于計(jì)算機(jī)視覺(jué)技術(shù)的研發(fā)與應(yīng)用創(chuàng)新,旗下自研的雙目視覺(jué)慣性模組及高精度Vi-SLAM算法已應(yīng)用于掃地機(jī)器人、服務(wù)機(jī)器人、穿戴計(jì)
2020-03-21 15:33:541033 視覺(jué)技術(shù)升級(jí)進(jìn)步。丨深耕不輟,實(shí)現(xiàn)業(yè)內(nèi)首款200幀雙目慣性相機(jī)面對(duì)日益提升的使用需求,為提升產(chǎn)品適用性,INDEMIND深耕不輟,為旗下雙目視覺(jué)慣性模組提供了200幀高速環(huán)境獲取能力,滿足了不同場(chǎng)景
2019-04-28 18:33:111894 視覺(jué)傳感器在智能網(wǎng)聯(lián)汽車(chē)上的應(yīng)用是以攝像頭方式出現(xiàn)的,一般分為單目攝像頭、雙目攝像頭、三目攝像頭和環(huán)視攝像頭。
2019-07-18 11:29:5828031 了人的視野范圍。雙目視覺(jué)一直是機(jī)器視覺(jué)領(lǐng)域的熱門(mén)研究課題,在工業(yè)控制、智能交通、金融、公共安全等應(yīng)用領(lǐng)域逐漸顯示出非常廣闊的發(fā)展前景。詳細(xì)分析和研究基于DM642的雙目視覺(jué)監(jiān)控系統(tǒng),給出系統(tǒng)的軟硬件設(shè)計(jì)方案,并在DM642開(kāi)發(fā)評(píng)估板(EVM)上實(shí)現(xiàn)系統(tǒng)功能。
2020-05-07 09:55:59966 1.1. 雙目視覺(jué)簡(jiǎn)介 雙目視覺(jué)廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測(cè)量、物體識(shí)別、虛擬現(xiàn)實(shí)、場(chǎng)景重建,勘測(cè)領(lǐng)域。 什么是雙目視覺(jué)? 雙目視覺(jué)是模擬人類視覺(jué)原理,使用計(jì)算機(jī)被動(dòng)感知距離的方法。從兩個(gè)或者
2020-10-23 09:51:5710866 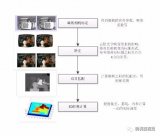
雙目視覺(jué)技術(shù)的原理、結(jié)構(gòu)、特點(diǎn)、發(fā)展現(xiàn)狀和發(fā)展方向分析 雙目立體視覺(jué)是機(jī)器視覺(jué)的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。 雙目立體視覺(jué)系統(tǒng)一般由雙攝像機(jī)從不同角度同時(shí)
2021-06-01 16:36:562223 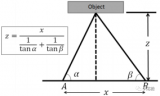
嵌入式雙目視覺(jué)系統(tǒng)和三維重建技術(shù)研究(嵌入式開(kāi)發(fā)方向)-該文檔為嵌入式雙目視覺(jué)系統(tǒng)和三維重建技術(shù)研究總結(jié)文檔,是一份很不錯(cuò)的參考資料,具有較高參考價(jià)值,感興趣的可以下載看看………………?
2021-07-30 11:50:037 雙目標(biāo)定和普通相機(jī)的標(biāo)定一樣,其標(biāo)定時(shí)不僅標(biāo)定出兩個(gè)相機(jī)的內(nèi)參,還要標(biāo)定出兩個(gè)相機(jī)之間的關(guān)系。因此,在進(jìn)行雙目標(biāo)定時(shí),需要使兩個(gè)相機(jī)對(duì)同一標(biāo)定板進(jìn)行多次取圖,分別標(biāo)定出各自的內(nèi)參和相對(duì)于標(biāo)定板的外參,然后便可計(jì)算出兩相機(jī)位置間的關(guān)系:
2022-10-10 17:25:311008 輸入數(shù)據(jù)來(lái)源可以是單目視覺(jué)相機(jī)、雙目視覺(jué)相機(jī),數(shù)據(jù)可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車(chē)道線檢測(cè)技術(shù),基于雙目圖片的稱為雙目車(chē)道線檢測(cè)技術(shù)。
2023-06-01 14:18:320 能視覺(jué)傳感技術(shù)下的智能視覺(jué)傳感器也稱智能相機(jī),是近年來(lái)機(jī)器視覺(jué)領(lǐng)域發(fā)展最快的一項(xiàng)新技術(shù)。智能相機(jī)是一個(gè)兼具圖像采集、圖像處理和信息傳遞功能的小型機(jī)器視覺(jué)系統(tǒng),是一種嵌入式計(jì)算機(jī)視覺(jué)系統(tǒng)。它將圖像
2022-10-27 16:20:58828 
本文對(duì)ToF、雙目視覺(jué)、結(jié)構(gòu)光這三種技術(shù)展開(kāi)分析,幫助你了解其各自的特點(diǎn)及應(yīng)用
2023-07-10 16:04:16904 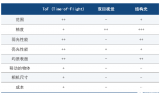
、圖像預(yù)處理和特征提取、立體匹配以及三維重建。為解決智能移動(dòng)機(jī)器人、工業(yè)裝配機(jī)器人、家用機(jī)器人、公共服務(wù)機(jī)器人的視覺(jué)問(wèn)題,雙目立體視覺(jué)技術(shù)的進(jìn)一步研究可對(duì)多目視覺(jué)具有重要的啟發(fā)。 本文對(duì)雙目立體視覺(jué)測(cè)深
2023-07-19 14:18:240 雙目更多的是基于物理測(cè)量,而單目視覺(jué)則是基于邏輯推理,通過(guò)大量的數(shù)據(jù)訓(xùn)練,先識(shí)別出目標(biāo),再根據(jù)目標(biāo)的大小和高度估算距離。因此,單目視覺(jué)的漏檢率高于雙目立體視覺(jué),因?yàn)榭陀^上存在corner case。
2023-08-17 09:40:062166 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論