 電子發燒友App
電子發燒友App


成本:
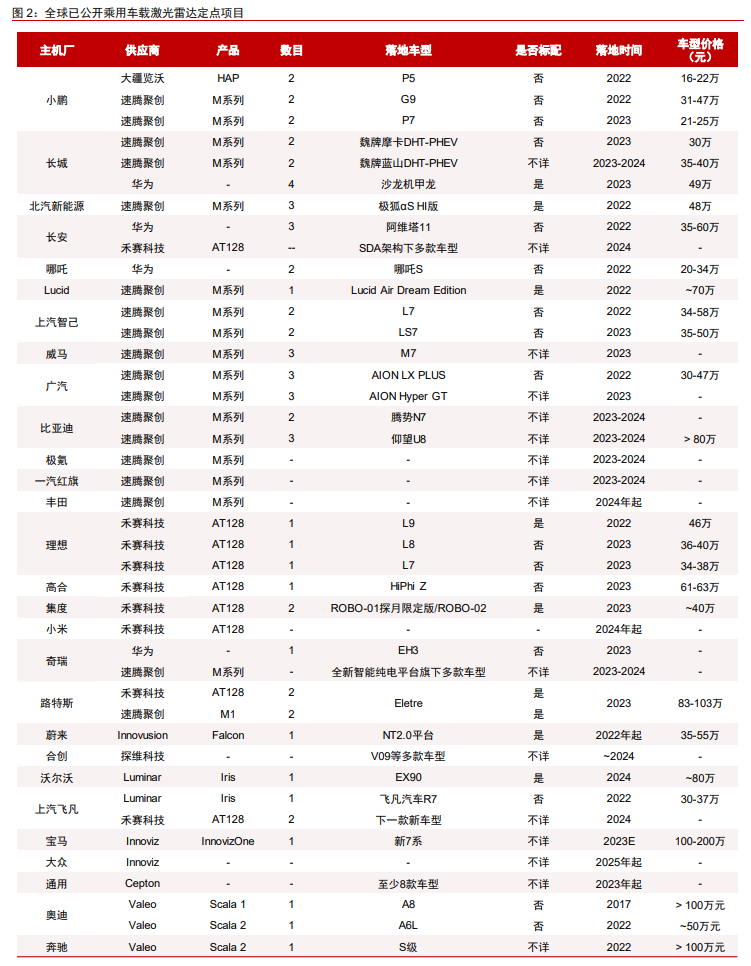
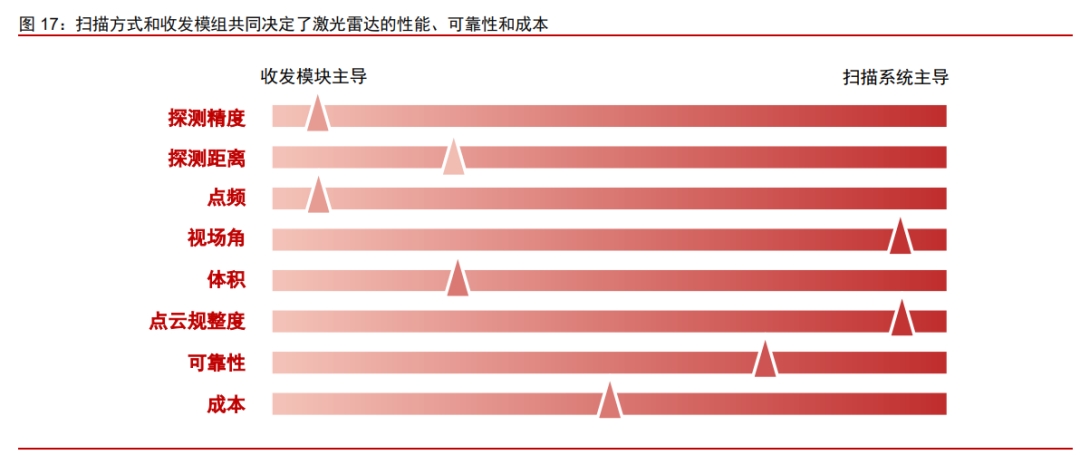
車載激光雷達短期成長確定性高,成本正在持續下探。收發模組占據激光雷達最主要的BOM成本,收發芯片格局和利潤空間較優。
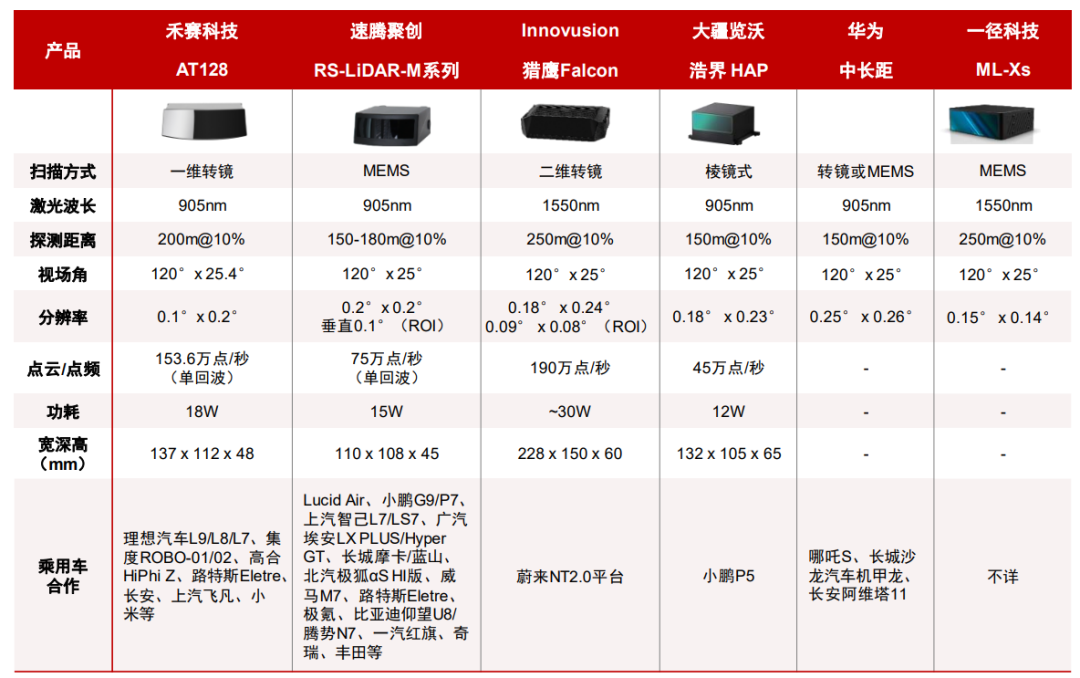
技術路線:禾賽科技主雷達AT128采用“905nm Vcsel發射+一維轉鏡掃描+SiPM接收”——成本、性能、可靠性三者平衡做得較好*一維轉鏡能做到多少線取決于有多少個收發模組,因此集成難度很大,較難做出高線數產品
速騰聚創M系列采用“905nm EEL發射+MEMS掃描+SiPM接收”——較高性價比、易于量產的結構設計、相對成熟的供應鏈
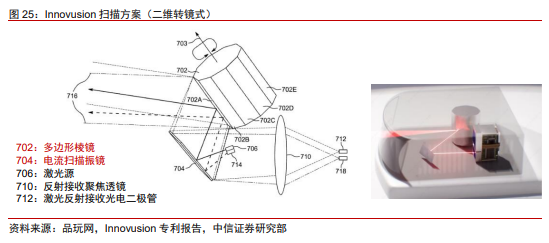
圖達通Falcon采用“1550nm光纖激光器+二維轉鏡掃描+APD接收”——性能表現突出、成本&功耗偏高,上限取決于基于硅光芯片的FMCW路線進展


特斯拉通過BEV、Transformer、柵格網絡等一系列新技術,彌補因沒有搭載激光雷達而導致無法還原周圍3D場景的不足,縮小多傳感器方案間的感知差距。
BEV:
Bird‘s Eye View, 將攝像頭提取到的圖像信息輸入至神經網絡以提取特征,再利用基于自注意力機制的Transformer算法將結果進行拼接,最終形成俯視鳥瞰圖。將多個傳感器生成的特征轉換到統一的坐標系下,再將其合并到一起,更貼近實際物理世界。
Transformer:
Transformer網格結構借鑒人腦的注意力機制組成,處理大量信息是能夠只選擇一些關鍵信息進行處理,以提升神經網絡效率。Transformer較傳統CNN模型飽和區間很大,因此更適宜于大規模數據訓練的需求。
柵格網絡:
Occupancy Network 在BEV基礎上添加Z軸,將BEV的2D柵格變為3D,實現3D空間重建
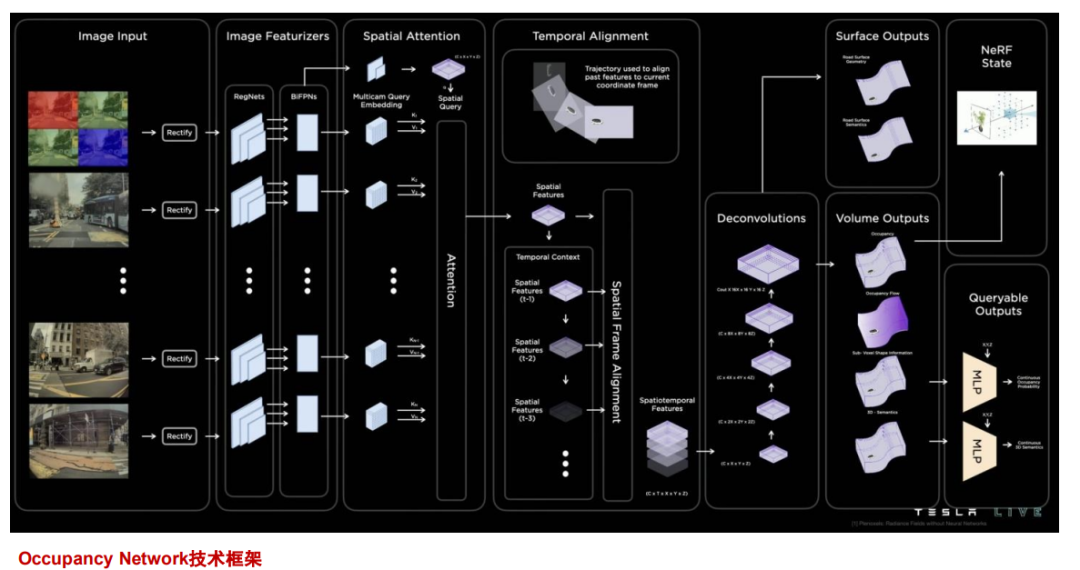
特征融合后,基于Deconvolution的解碼器會解碼出每個3D空間位置的占據情況(Occupancy),語義(Semantics)以及運動情況(Flow)


MEMS:
micro-electromechanical system微振鏡,對于振動相對敏感,因此需要研發隔離振動技術。核心結構是尺寸很小的懸臂梁結構,通過驅動扭桿使得MEMS微振鏡進行振蕩扭轉,從而對激光進行反射,僅需要少量激光探測器即可完成高線束的掃描效果,因此體積較小、成本可控。
MEMS激光雷達想要提升性能可以考慮增大振鏡尺寸。但鏡面尺寸變大后,成本會明顯上升,且支撐振鏡的兩根扭桿也更加容易斷裂,因此需研發隔離振動技術。
MEMS通常有電磁驅動和靜電驅動兩種方式,電磁驅動的驅動力來自于電磁或永磁體(Magnet),需要有數十微米厚度的電磁線圈,封裝需要配置永磁鐵;而靜電驅動則是利用帶電導體(電極板)間的靜電作用力。
靜電驅動方式更成熟,封裝簡單,體積小且功耗低,但電磁驅動能夠將懸臂梁的強度做得更高,以提升可靠性,同時實現更大的掃描角度。
采用1550nm波長,通過改變發射端而非掃描段也可提升激光雷達的性能,確保可靠性,但同時,1550nm帶來的成本和功耗也會增加。
1550nm光源在人眼安全方面較905nm更有優勢,人眼可見光波長范圍在380-780nm之間,1400nm以上的激光在到達人眼視網膜前就被眼球的透明部分吸收完,因此對人眼的傷害相對較小。也就意味著1550nm能夠在更高光源功率下運行,從而實現更高的性能。且1550nm的光束發散角要小于905nm,發散角越小,光束照到遠距離小物體時信息損失就越少,返回能量越大,探測效果更好。1550nm探測距離約250m,905nm約150-200m。對于相關應用者來說,做好平衡更關鍵。
*1550nm“容易被水吸收”,在雨天探測效果會大打折扣,尤其是成片的水簾或水灘;同時高功耗帶來散熱、耗電等困難也需一并考慮。

二維轉鏡:
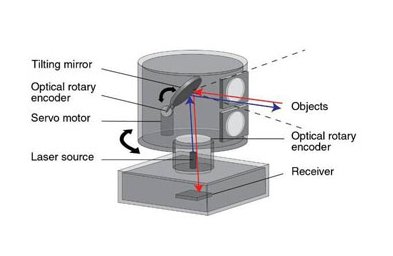
二維轉鏡指有一縱一橫兩面掃瞄鏡,橫軸的多邊形棱鏡能夠實現光源的水平掃描,而縱軸的掃描振鏡則可以改變光源的垂直方向,通過兩面鏡子的旋轉配合,二維轉鏡僅需一束光源就能夠實現機械旋轉式激光雷達若干個光源才能實現的掃描效果。
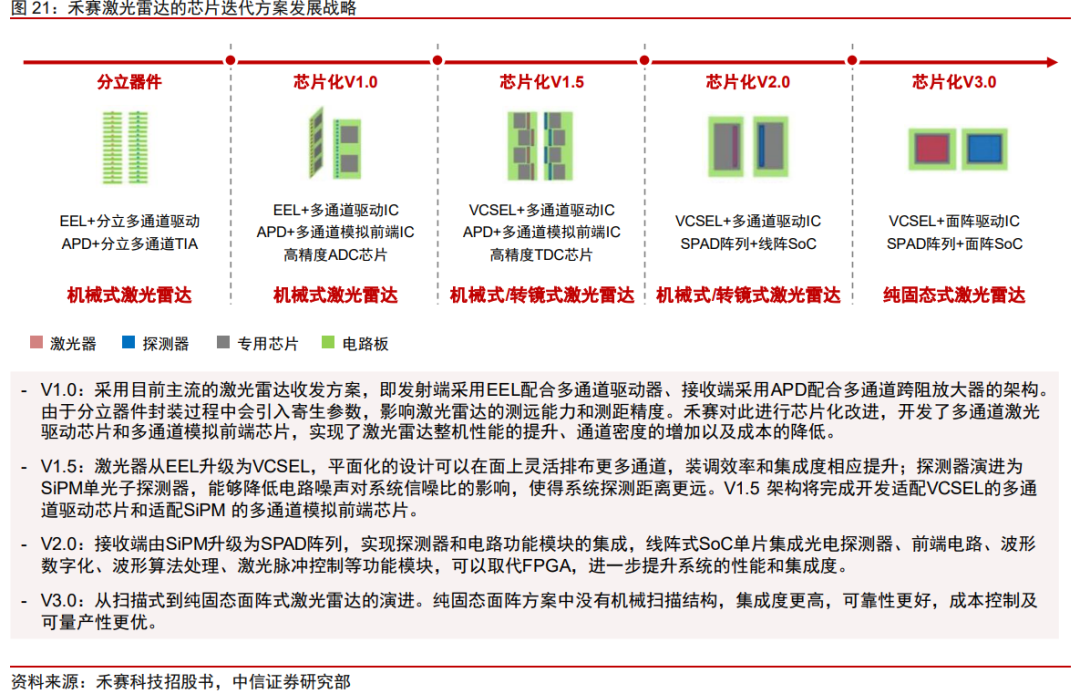
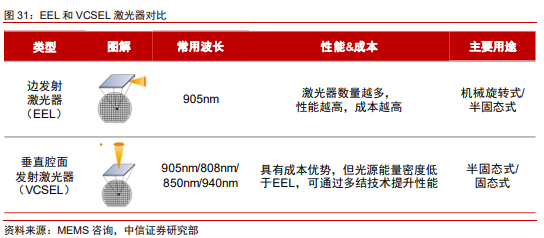
EEL:邊發射激光器
VCSEL:垂直腔面發射激光器
激光發射器的選擇主要取決于激光雷達的掃描方案和測距原理。VCSEL具有成本低、集成度高的優點。除激光雷達外,也可應用于DMS駕駛員監控攝像頭。

PN結:
為解決VCSEL發光面積大、導致光源能量密度低,可實現的有效距離偏近,VCSEL廠商研發多結技術,即多個高摻雜隧道結(PN結),通過優化控制隧道結摻雜,可降低電流通過的電阻,從而減少電子發射光子所需的驅動電流,以實現更高的功率密度。量產產品的光功率密度約1200-1500W/mm2,對比EEL的光功率密度在萬級別,二者差距甚大。但目前可靠性多結后變差、散熱問題等尚未解決。
APD 雪崩光電二極管,SPAD單光子雪崩二極管,SiPM硅光電倍增管。SPAD是蓋革模式(即偏置電壓高于擊穿電壓)下的APD,具備單光子成像能力,而SiPM是硅基陣列模式的SPAD,由多個SPAD并聯組成。
與APD相比,SPAD/SiPM的主要優勢在于更強的增益效果和更高的靈敏度,但面臨日光干擾的問題。
對比SPAD和SiPM,長距激光雷達目前多使用SiPM,Flash補盲激光雷達則以SPAD為主。

Deconvolution:
反卷積,反濾波,逆卷積,去卷積
定義:反卷積(deconvolution)是指通過 計算 輸出和已知輸入 ,求 未知輸入的過程。
應用1:圖像識別。應用2:可以從一組模糊的光切圖像中提取出清晰的序列圖像。如--AutoQuant三維反卷積軟件。
corner case:
數據庫中未被標注過的物體,如異形車、側翻的大卡車、掀開后備箱的車等,純視覺方案很難準確識別。
其他一些知識點
SWC: software component
SOC: system on chip
Arxml:實質是XML文件,一般通過autosar標準的XSD進行約束,arxml是一個通用的配置/數據庫文件;ARXML可以包含service和signal的相關信息,以及E2E相關信息,若ARXML中定義了且完整體現了S2S轉發關系信息,則也可以通過解析ARXML(替換轉發關系表)的方式來實現S2S的測試。
XML文檔是樹狀結構;
第1行:XML聲明。必須放在第一行,第一列,聲明語句之前,不能有任何的空格和注釋。定義了XML版本和編碼信息。其中,版本永遠都是1.0;編碼方式一般都使用UTF-8(該編碼支持中文標簽),編碼信息不區分大小寫。
第2行:根元素,XML有且僅有一個根元素。元素由開始標簽、元素內容、結束標簽組成,沒有被其它元素包圍的元素稱為根元素;
第3行:注釋的寫法:,但不能嵌套使用。
第4行:” id=;book_1’”表示屬性。屬性必有值,值必須使用引號(單引號,雙引號)。屬性其實是描述標簽一些額外的信息,一個標簽可以有多個屬性。可以將屬性看為元素的另一種寫法。
第5~7行:表示元素。
注意:XML中的標簽區分大小寫,對應的開始標簽和結束標簽必須大小寫一致。
標簽命名:普通字符有:字母,數字,-中橫線,_下劃線,。點號,數字不能作為首字母出現等。大段內容有許多特殊符號內容,使用轉義,如下的例子:了看可是ljlkdjlsjd lsksj lsjdlks d]]》
XML中的標簽是成對的,而且要正確嵌套:標簽可以嵌套,但不可以交叉嵌套。
實際的項目當中,第4~8行這部分經常是重復的。
特殊符號使用符號實體:
單引號:用'表示
雙引號:用“表示
空格:用 表示
&符號:用&表示
》符號:用》表示
《符號:用《表示
SOA:
Service-Oriented Architecture,面向服務的架構
S2S:
Services(基于以太網的服務)ToSignal(基于信號)
用于測試開發的輸入文件應該包含三類信息:
1)S2S需求規范;
2)Service、Signal、E2E相關信息(ARXML中包含,或提供同樣包含相關信息的其它類型的數據庫文件)
3)S2S轉發關系表
4)其他輸入(可有,需求規范中設計的如SecOC等需求對應的輸入物)
-基于AutoSar, S2S有兩種部署方案,一個是在CP,一個在AP
CP:
1)可在信號和服務端分別配置相同或者不同的E2E配置
2)E2E不正確的不被轉發
3)優點:信號路徑很短
4)缺點:需要SomeIP協議棧
AP:
1)可在信號和服務端配置相同或不同的E2E配置
2) E2E不正確的在另一端反饋E2E錯誤
3)優點:有現成AutoSAR方案,無需SomeIP協議棧
4)缺點:信號路徑過長,需用IPC縮短A核和M核通信路徑
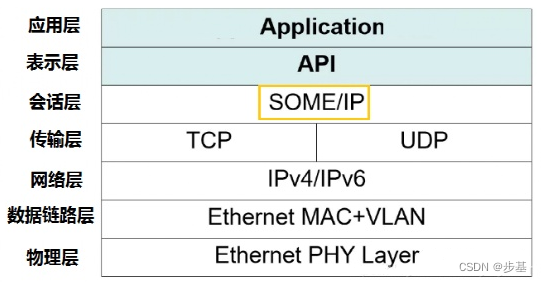
SOME/IP:
Scalable service-Oriented Middleware over IP,是目前汽車行業實現SOA架構最核心的通信協議。SOME/IP協議以服務為單位管理整車信息,服務可以包含各種可調用方法(Method)和事件通知組(EventGroup),通過Service Interface將信息進行傳遞共享,按需分配服務。
SOME/IP位于OSI七層模型的5-7層,需要運行TCP/IP協議棧之上,即所有的SOME/IP報文都是IP報文,都是TCP/UDP報文。
SOME/IP 主要可以提供以下功能:
① 數據序列化與反序列化(Serialization/Deserialization):服務通信數據與二進制數據流之間的雙向轉換;
② 可用服務發現(SD):管理服務狀態,發現和提供服務,動態配置 SOME/IP 報文發送;
③ 服務發布與訂閱(Publish/Subscribe):管理服務的發布與訂閱關系;
④ 遠程服務調用(RPC):實現控制器(Client)使用網絡內其他控制器(Server)提供的服務。
編輯:黃飛



















 工商網監
工商網監
評論