 電子發燒友App
電子發燒友App


觸覺是接觸、滑動、壓覺等機械刺激的總稱。多數動物的觸覺器是遍布全身的,像人類皮膚位于人的體表,并且遍布全身,觸覺器有很多種,有的感覺冷熱,有的感覺痛癢,還有的感覺光滑或是粗糙,不同部位的皮膚對不同個東西的觸覺不一樣,這是因為不同感受器分布的數量和種類不同。人類的臉部、嘴唇、手指等部位的各種感受器很多,所以這些部位的感覺很敏感。
人類皮膚的感知都是定性卻無法定量。而觸覺傳感器可以模仿人類皮膚,更讓人驚嘆的是,還可以把溫度、濕度、力等感覺用定量的方式表達出來,甚至可以幫助傷殘者獲得失去的感知能力。比如一款新型毛狀電子皮膚,能使機器人快速分辨出呼吸引起的輕微空氣波動或者微弱地心跳震動。這款傳感器甚至比人類皮膚更敏感,能夠廣泛應用于假肢、心率監視器以及機器人。
觸覺傳感器的主要功能
檢測功能
檢測功能包括對操作對象的狀態、機械手與操作對象的接觸狀態、操作對象的物理性質進行檢測。
識別功能
識別功能是在檢測的基礎上提取操作對象的形狀、大小、剛度等特征,以進行分類和目標識別。
觸覺傳感器的發展歷程
70 年代國外的機器人研究已成熱點,但觸覺技術的研究才開始且很少。當時對觸覺的研究僅限于與對象的接觸與否 接觸力大小,雖有一些好的設想 但研制出的傳感器少且簡陋。
80 年代是機器人觸覺傳感技術研究、發展的快速增長期,此期間對傳感器設計、原理和方法作了大量研究,主要有電阻、電容、壓電、熱電 磁、磁電、力、光、超聲和電阻應變等原理和方法。從總體上看 80 年代的研究可分為傳感器研制、觸覺數據處理、主動觸覺感知三部分,其突出特點是以傳感器裝置研究為中心 主要面向工業自動化。
90年代對觸覺傳感技術的研究繼續保持增長并多方向發展。按寬的分類法,有關觸覺研究的文獻可分為:傳感技術與傳感器設計、觸覺圖像處理、形狀辨識、 主動觸覺感知、結構與集成。
2002年,美國科研人員在內窺鏡手術的導管頂部安裝觸覺傳感器,可檢測疾病組織的剛度,根據組織柔軟度施加合適的力度,保證手術操作的安全。
2008年,日本Kazuto Takashima等人設計了壓電三維力觸覺傳感器,將其安裝在機器人靈巧手指端,并建立了肝臟模擬界面,外科醫生可以通過對機器人靈巧手的控制,感受肝臟病變部位的信息,進行封閉式手術。
2009年,德國菲勞恩霍夫制造技術和應用材料研究院的馬庫斯-梅瓦爾研制出新型觸覺系統的章魚水下機器人,可精確地感知障礙物狀況,可以自動完成海底環境的勘測工作。
觸覺傳感器分類
機器人感知能力的技術研究中,觸覺類傳感器極其重要。觸覺類的傳感器研究有廣義和狹義之分。廣義的觸覺包括觸覺、壓覺、力覺、滑覺、冷熱覺等。狹義的觸覺包括機械手與對象接觸面上的力感覺。從功能的角度分類,觸覺傳感器大致可分為接觸覺傳感器、力-力矩覺傳感器、壓覺傳感器和滑覺傳感器等。
壓阻式機器人觸覺傳感器
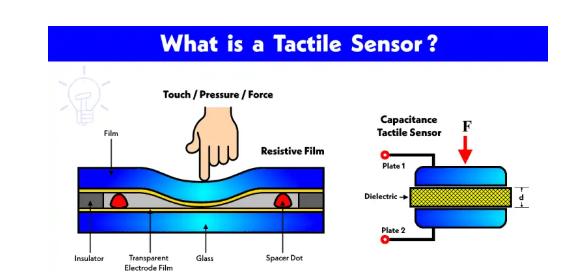
壓阻式觸覺傳感器是利用彈性體材料的電阻率隨壓力大小的變化而變化的性質制成,并把接觸面上的壓力信號變為電信號。
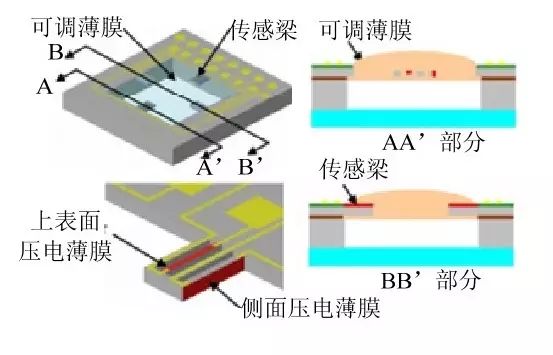
1981年,研究人員在金屬電極間夾入碳纖維和碳氈,構成壓阻傳感器;1999年,中國科學院使用力敏電阻制作了能檢測三維接觸力信息的陣列式觸覺傳感器;2007年,臺灣國立大學利用高分子壓阻復合膜設計研制了傳感范圍和靈敏度可調整的三軸觸覺傳感器。該三軸觸覺傳感器由四個傳感懸臂梁及粘貼在各懸臂梁表面和側面的高分子壓阻復合薄膜組成。
光傳感式機器人觸覺傳感器
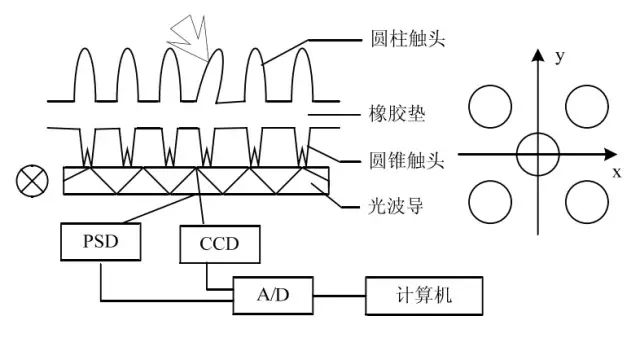
南京航空航天大學設計的基于光波導原理的能檢測三向力的觸覺傳感器。觸覺傳感系統由力敏硅橡膠圓柱觸頭、圓錐觸頭組成,且圓柱觸頭與橡膠墊另一側的圓錐觸頭一一對應。新型光電敏感器件PSD,不僅可以檢測三向力,也可以確定受力位置信息。并且觸覺傳感器與視覺傳感器的輸出兼容,適用于機器人實時力控制和主動觸覺系統。
電容效應式機器人觸覺傳感器
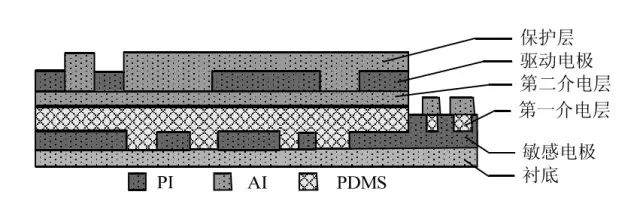
電容式觸覺傳感器原理是:在外力作用下使兩極板間的相對位置發生變化,從而導致電容變化,通過檢測電容變化量來獲取受力信息。2008年,上海微系統與信息技術研究所傳感技術國家重點實驗室研制的柔性電容式觸覺傳感器可測量任意形狀物體表面的接觸力。
磁導式機器人觸覺傳感器
磁導式觸覺傳感器在外力作用下磁場發生變化,并把磁場的變化通過磁路系統轉換為電信號,從而感受接觸面上的壓力信息。
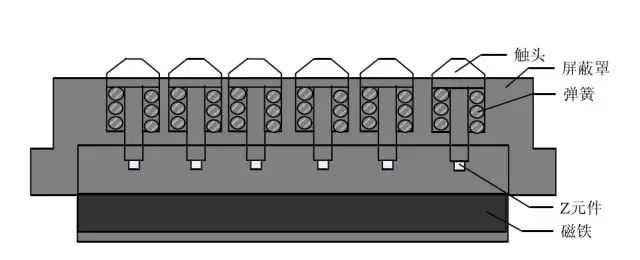
哈爾濱工業大學機器人研究所設計的基于磁敏Z元件的觸覺傳感器,其中磁敏Z元件能夠輸出隨磁場強度成比例變化的模擬電壓信號,靈敏度很高,工作條件要求很低,只要提供有變化的磁場就可以工作。采用平板磁鐵在空氣中的磁場強度衰減作為Z元件的敏感源,通過測量彈性裝置把力轉換為Z元件與磁鐵之間的距離,而Z元件與磁鐵之間的距離與磁場強度的變化是對應的,這樣,通過把磁場強度參數轉換為位移參數,再轉換為力的參數,從而達到測力的目的。
磁導式觸覺傳感器具有靈敏度高,體積小的優點,但與其它類型的機器人觸覺傳感器相比實用性較差。
壓電式機器人觸覺傳感器
壓電轉換元件是典型的力敏元件,具有自發電荷可逆的重要特性,而且具有體積小、質量輕、結構簡單、工作可靠、固有頻率高、靈敏度和信噪比高、性能穩定等優點。
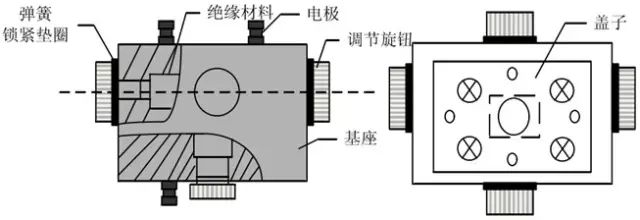
2004年,重慶大學設計了利用壓電敏感材料檢測三向力的觸覺傳感器。傳感頭部分主要由基座、蓋子、傳感器內芯、調節機構等組成。傳感頭的內芯部分,主要由五個完全相同的壓電元件、一個正方體硬質合金、一段圓柱硬質合金、一段銅柱構成。
接觸覺傳感器
接觸覺傳感器用以判斷機器人是否接觸到外界物體或測量被接觸物體的特征的傳感器,主要有以下幾種類型。
微動開關式:由彈簧和觸頭構成。觸頭接觸外界物體后離開基板,造成信號通路斷開,從而測到與外界物體的接觸。
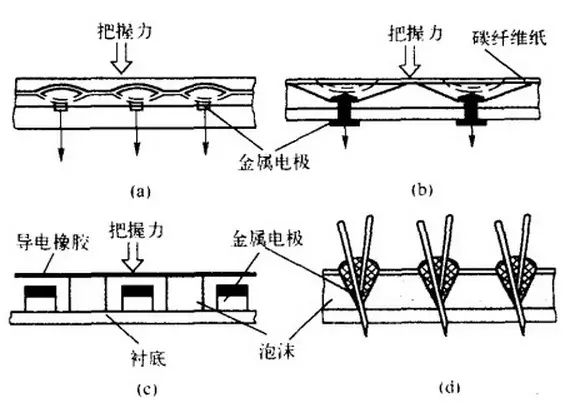
導電橡膠式:它以導電橡膠為敏感元件。當觸頭接觸外界物體受壓后,壓迫導電橡膠,使它的電阻發生改變,從而使流經導電橡膠的電流發生變化。
含碳海綿式:它在基板上裝有海綿構成的彈性體,在海綿中按陣列布以含碳海綿。接觸物體受壓后,含碳海綿的電阻減小,測量流經含碳海綿電流的大小,可確定受壓程度。
碳素纖維式:以碳素纖維為上表層,下表層為基板,中間裝以氨基甲酸酯和金屬電極。接觸外界物體時碳素纖維受壓與電極接觸導電。
氣動復位式:它有柔性絕緣表面,受壓時變形,脫離接觸時則由壓縮空氣作為復位的動力。與外界物體接觸時其內部的彈性圓泡(鈹銅箔)與下部觸點接觸而導電。
力-力矩覺傳感器
用于測量機器人自身或與外界相互作用而產生的力或力矩的傳感器。它通常裝在機器人各關節處。剛體在空間的運動可以用 6個坐標來描述,例如用表示剛體質心位置的三個直角坐標和分別繞三個直角坐標軸旋轉的角度坐標來描述。可以用多種結構的彈性敏感元件 來敏感機器人關節所受的 6個自由度的力或力矩,再由粘貼其上的應變片(見半導體應變計 、電阻應變計 )將力或力矩的各個分量轉換為相應的電信號。常用彈性敏感元件的形式有十字交叉式、三根豎立彈性梁式和八根彈性梁的橫豎混合結構等。在每根梁的內側粘貼張力測量應變片,外側粘貼剪切力測量應變片,從而構成 6個自由度的力和力矩分量輸出。?
壓覺傳感器
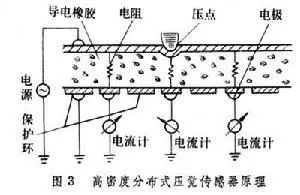
測量接觸外界物體時所受壓力和壓力分布的傳感器。它有助于機器人對接觸對象的幾何形狀和硬度的識別。壓覺傳感器的敏感元件可由各類壓敏材料制成,常用的有壓敏導電橡膠、由碳纖維燒結而成的絲狀碳素纖維片和繩狀導電橡膠的排列面等。
如圖是以壓敏導電橡膠為基本材料的壓覺傳感器。在導電橡膠上面附有柔性保護層,下部裝有玻璃纖維保護環和金屬電極。在外壓力作用下,導電橡膠電阻發生變化,使基底電極電流相應變化,從而檢測出與壓力成一定關系的電信號及壓力分布情況。通過改變導電橡膠的滲入成分可控制電阻的大小。例如滲入石墨可加大電阻,滲碳、滲鎳可減小電阻。通過合理選材和加工可制成高密度分布式壓覺傳感器。這種傳感器可以測量細微的壓力分布及其變化,故有人稱之為“人工皮膚”。
滑覺傳感器
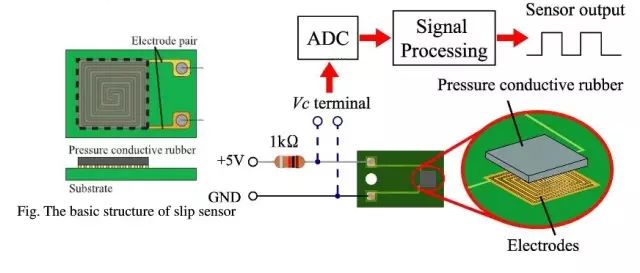
用于判斷和測量機器人抓握或搬運物體時物體所產生的滑移。它實際上是一種位移傳感器。兩電極交替盤繞成螺旋結構,放置在環氧樹脂玻璃或柔軟紙板基底上,力敏導電橡膠安裝在電極的正上方。在滑覺傳感器工作過程中,通過檢測正負電極間的電壓信號并通過ADC將其轉換成數字信號,采用DSP芯片進行數字信號處理并輸出結果,判定物體是否產生滑動。
滑覺傳感器按有無滑動方向檢測功能可分為無方向性、單方向性和全方向性三類。
無方向性傳感器有探針耳機式,它由藍寶石探針、金屬緩沖器、壓電羅謝爾鹽 晶體和橡膠緩沖器組成。滑動時探針產生振動,由羅謝爾鹽轉換為相應的電信號。緩沖器的作用是減小噪聲。
單方向性傳感器有滾筒光電式,被抓物體的滑移使滾筒轉動,導致光敏二極管接收到透過碼盤(裝在滾筒的圓面上)的光信號,通過滾筒的轉角信號而測出物體的滑動。
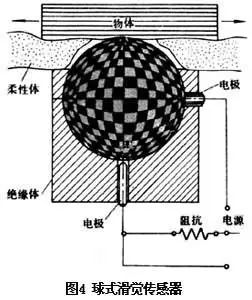
全方向性傳感器采用表面包有絕緣材料并構成經緯分布的導電與不導電區 金屬球。當傳感器接觸物體并產生滑動時,球發生轉動,使球面上的導電與不導電區交替接觸電極,從而產生通斷信號,通過對通斷信號的計數和判斷可測出滑移的大小和方向。
觸覺傳感器在假肢中的應用
假肢可以奇跡般地恢復一些截肢者失去的功能,但它們至今尚無法完成一件事,那就是恢復準確的觸覺。如今,研究人員報告說,在不遠的將來,這些人造的手臂和腿腳有可能獲得接近真實的觸覺。利用一種兩層的柔韌薄塑料,科學家研制出一種新的電子傳感器,能夠模擬人體皮膚中觸覺傳感器的神經信息而向小鼠腦組織傳送信號。
長期以來,多個研究團隊一直試圖為假肢佩戴者恢復觸覺。例如,兩年前,美國俄亥俄州克利夫蘭市凱斯西儲大學的研究人員報告說,通過在假手使用者的手臂外圍神經中連接壓力傳感器從而使其獲得了觸覺。
然而盡管這些成績已經恢復了基本的觸覺,但其傳感器和信號與皮膚中的天然觸覺傳感器——機械性感受器發送的信號仍存在巨大差異。
當人體中的機械性感受器感受到壓力后,它們會發送一股神經脈沖;壓力越大,脈沖頻率越高。而之前的觸覺傳感器在更大的壓力下會產生更強的電信號,而不是高頻脈沖流。電信號必須被發送到另一個處理芯片,該處理芯片將信號的強度轉換成一個數字脈沖流,然后才被發送到周圍神經或腦組織中去。
受到天然機械性感受器的啟發,由加利福尼亞州帕洛阿爾托市斯坦福大學化學工程師鮑哲南率領的研究人員,開始著手研制能夠直接大量產生數字信號的人造皮膚。
據鮑哲南介紹,這是第一種能夠感知壓力并與大腦溝通的柔性人造皮膚,距真正像人類皮膚的柔性人造皮膚“更近一步”。
這種人造皮膚像“一頁紙那么薄”,可以分為兩層,外層是可以感知壓力的傳感器,由塑料材料加上碳納米管制成;內層是由噴墨打印機印刷出的柔性電子電路,可以把壓力信號改變成電信號并傳遞給大腦。
觸覺傳感器在工業制造中的應用
如今大熱的工業互聯網中重要的角色就是工業機器人。著名汽車制造商比如特斯拉、寶馬等等的車間幾乎見不到一個人,全靠工業機器人實現組裝、噴漆、檢測等工作。今年富士康在國內引進數千機器人取代工人更是證明了未來制造業采用工業機器人是大勢所趨。力傳感器賦予機器人的手腕觸覺。力傳感器安裝在機器人和它操作的機臺之間,這樣兩者間的所有力都能被機器人和機臺感知和監控。
2015年問世的一款新型的鍵盤產品“101touch”,其特色在于鍵盤完全是一塊可定制的觸摸屏,你可以根據電腦使用需求來更改鍵盤布局,來適應不同的需求,如打字、游戲操作、視頻播放編輯等等,甚至變成一款專為兒童設計的卡通鍵盤。
觸覺傳感器在可穿戴電子產品中的應用
近年來,便攜式智能電子產品發展日新月異,出現了眾多多功能的可穿戴器件。將電子產品用于手鐲、眼鏡和鞋子等隨身穿戴品一樣“穿戴”在身上已然成為一種新時尚。其中,穿戴式觸覺傳感器是當下科技圈最前沿的領域之一,可模仿人與外界環境直接接觸時的觸覺功能,主要包括對力信號、熱信號和濕信號的探測,是物聯網的神經末梢和輔助人類全面感知自然及自己的核心元件。
發展穿戴式、能夠適應基底任意變形、同時對多種無規則觸覺刺激有準確響應的新型觸覺傳感器件至關重要。隨著石墨烯、碳納米管、氧化鋅、液態金屬等新型功能材料的出現,柔性電子相關制備技術的革新,穿戴式觸覺傳感器的研究在近幾年得到了迅猛的發展。
穿戴式觸覺傳感器通常構建在類似皮膚的彈性基底或者可伸縮的織物上以獲得柔性和可伸縮性。隨著材料科學、柔性電子和納米技術的飛速發展,器件的靈敏度、量程、規模尺寸以及空間分辨率等基礎性能提升迅速,甚至超越了人的皮膚。同時,為了適應對力、熱、濕、氣體、生物、化學等多刺激分辨的傳感要求,器件設計更加更精巧,集成方案也更加更成熟。具有生物兼容、生物可降解、自修復、自供能及可視化等實用功能的智能傳感器件也應運而生。此外,穿戴式電子產品朝著集成化方向發展,即針對具體應用將觸覺傳感器與相關功能部件(如電源、無線收發模塊、信號處理、執行器等)有效集成,打造具有良好柔性、空間適應性和功能性的穿戴式平臺。
目前,穿戴式觸覺傳感器在實際應用仍然面臨很多挑戰,例如傳感器在反復變形過程中的性能退化,多刺激同時探測的串擾解耦,穿戴式平臺內部器件之間的力、熱、電性能匹配等。應對這些挑戰將帶來新的機遇,為相關材料制備、器件加工及系統集成指明未來的發展方向。毫無疑問,穿戴式觸覺傳感器將朝向更加柔性化、小型化、智能化、多功能化、人性化方向發展。觸覺傳感器的適用范圍將大大拓寬,在人機交互系統、智能機器人、移動醫療等領域具有巨大的應用前景。
編輯:黃飛










 工商網監
工商網監
評論