 電子發燒友App
電子發燒友App


我們駕駛汽車,按著GPS或北斗導航的指示行駛在陌生道路上,當穿越隧道時導航系統依然可以為我們提供方向、速度、里程、時間等行駛數據,我們驚嘆于脫離了衛星系統的信號接收,導航系統如何運行?這就是慣性技術為我們續航。
慣性技術
慣性技術是用來實現運動物體姿態和運動軌跡控制的一門技術,它是慣性儀表、慣性穩定、慣性系統、慣性制導和慣性測量等相關技術的總稱。慣性技術涉及物理、數學、力學、光學、材料學、機密機械學、電子技術、計算機技術、控制技術、測量技術、仿真技術、加工制造及工藝技術等,是一門多學科交叉的技術,主要研究慣性儀表和慣性系統的理論、設計、制造、試驗、應用、維護,廣泛應用于航空、航天、陸地導航和大地測量、鉆井開隧道、地質勘探、機器人、車輛、醫療設備等,以及照相機、手機、玩具等領域,總之,敏感物體的運動姿態和軌跡、定位和定向都少不了它。
慣性技術是現代精確導航、 制導與控制系統的核心信息源.。在構建陸海空天電?(磁)?五維一體信息化體系中,在實現軍事裝備機械化與信息化復合式發展的進程中, 慣性技術具有不可替代的關鍵支撐作用。
慣性技術原理
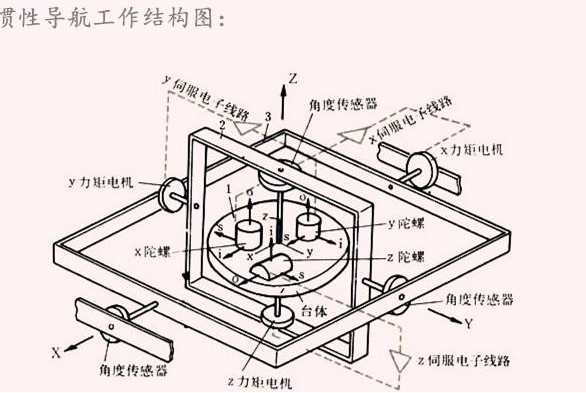
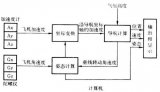
慣性導航技術是慣性技術的核心和發展標志,慣性導航系統?(Inertia navigation system,INS)?利用陀螺儀和加速度計?(統稱為慣性儀表)?同時測量載體運動的角速度和線加速度,并通過計算機實時計算出載體的三維姿態、 速度、 位置等導航信息。
陀螺儀就是慣性制導的基礎
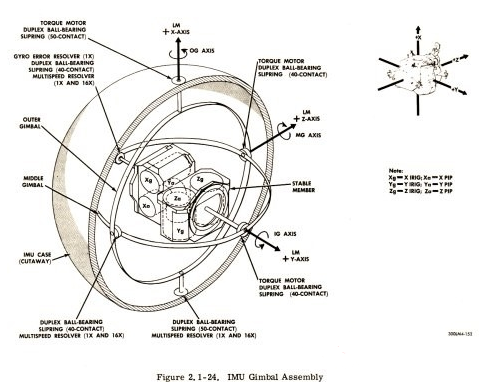
慣性導航系統有平臺式和捷聯式兩類實現方案:前者有跟蹤導航坐標系的物理平臺, 慣性儀表安裝在平臺上, 對加速度計信號進行積分可得到速度及位置信息, 姿態信息由平臺環架上的姿態角傳感器提供;慣導平臺可隔離載體角運動, 因而能降低動態誤差, 但存在體積大、 可靠性低、 成本高、 維護不便等不足。
捷聯式慣導系統沒有物理平臺, 慣性儀表與載體直接固連, 慣性平臺功能由計算機軟件實現, 姿態角通過計算得到, 也稱為 “數學平臺”。
慣導系統的基本方程?(比力方程)?如式?(1)?所示:

式中, 為載體的地速矢量,
為載體的地速矢量, 是加速度計測量值(比力),
是加速度計測量值(比力), 為地球轉速,
為地球轉速, 為平臺相對地球的轉速,
為平臺相對地球的轉速, 為重力加速度,
為重力加速度, 為哥氏加速度項,
為哥氏加速度項, 為離心加速度項。
為離心加速度項。
由于捷聯系統中慣性儀表要承受載體角運動的影響, 故要求其動態范圍大、 頻帶寬、 環境適應性好等, 對導航計算機的速度與容量要求較高. 捷聯系統具有結構緊湊、 可靠性高、 質量輕、 體積小、 功耗低、維護方便、 成本低等優點, 也便于與其他導航系統或設備進行集成化、 一體化設計, 已成為現代慣性系統技術發展的主流方案。
慣性導航技術的特點?
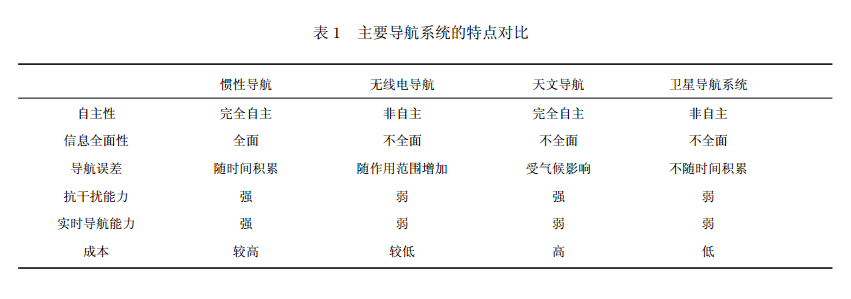
與其他導航系統相比, 慣導系統同時具有信息全面、 完全自主、 高度隱蔽、 信息實時與連續, 且不受時間、 地域的限制和人為因素干擾等重要特性?(見表 1), 可在空中、 水中、 地下等各種環境中正常工作。
在導彈、 火箭、 飛機等需要機動、 高速運行的運載體的導航、 制導與控制?(Guidance navigation and control, GNC)?系統中, 慣性系統因其測量頻帶寬且數據頻率高?(可達數百赫茲以上)、 測量延時短?(可小于 1 ms), 易于實現數字化, 成為 GNC 系統實現快速、精確制導與控制的核心信息源, 其性能對制導精度起著關鍵作用, 例如, 純慣性制導地地導彈命中精度的 70 %?以上取決于慣性系統的精度。
同時, 慣性技術還促進了最優濾波技術等先進控制理論在工程中實際應用. 作為發達國家嚴加封鎖的國防關鍵技術, 慣性技術是現代各類運載體 GNC 系統功能實現的基礎, 是制導武器或武器平臺的支撐性關鍵技術。
除軍用以外, 目前慣性技術在民用領域也有大量應用, 如大地測量、 石油鉆井、 隧道工程、 地質勘探、 機器人、 智能交通、 醫療設備、 照相機、 手機、玩具等。因此凡是需要實時敏感或測量物體運動信息的場合, 慣性技術均可發揮重要作用。
慣性導航系統的主要不足是導航誤差會隨時間積累, 且成本相對較高. 隨著其他導航技術尤其是衛星導航技術, 如 GPS 技術的成熟和廣泛應用, 研究人員曾擔心慣導技術未來的前景。
但是幾次高技術局部戰爭中, 電子戰、 導航戰、 體系化作戰模式的出現證明了幾乎僅有慣性導航系統都能在強電磁干擾的極端惡劣環境下持續、 穩定地工作, 這進一步強化了慣性系統在武器裝備中不可替代的地位。
慣性技術的發展歷程
慣性技術已經歷百余歷史,其發展歷程如圖1所示。圖中,折線下方為該階段主要技術理論,上方為出現的慣性器件及其精度。且各技術發展階段間并無完整界限。由圖可見,按各類陀螺儀、理論和新型傳感器先后,慣性技術發展通常分為四代。
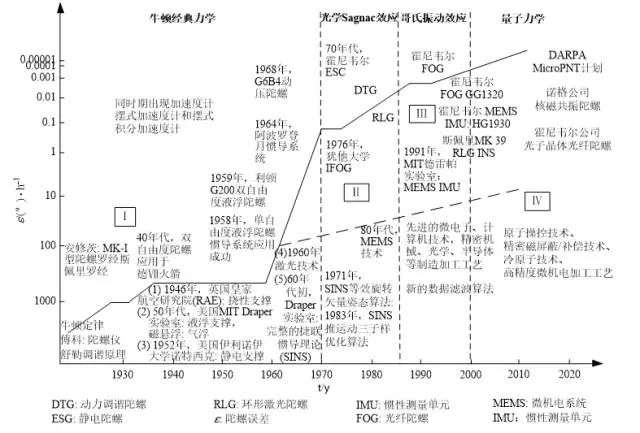
慣性技術發展歷程
第一代,基于牛頓經典力學原理。自1687年牛頓三大定律的建立,到1910年的舒勒調諧原理,第一代慣性技術奠定了整個慣性導航發展的基礎。典型代表為三浮陀螺、靜電陀螺以及動力調諧陀螺。特點是種類多、精度高、體積質量大、系統組成結構復雜、性能受機械結構復雜和極限精度制約,產品制造維護成本昂貴,典型產品有美國MX洲際導彈用三浮儀表平臺系統。
第二代,基于薩格奈克(Sagnac)效應。典型代表是激光和光纖陀螺。其特點是反應時間短、動態范圍大、可靠性高、環境適應性強、易維護、壽命長。典型產品是美國諾格斯佩里公司研制成功的Mk39系列和Mk49型激光陀螺捷聯式艦船慣性導航系統、美國霍尼韋爾公司的激光捷聯慣導系統。光學陀螺的出現有力推動了捷聯慣性系統發展。
第三代,基于哥氏振動效應和微米/納米技術。典型代表是MEMS陀螺、MEMS加速度計及相應系統。其特點是體積小、成本低、中低精度、環境適應性強、易于大批量生產和產業化。典型產品為美國霍尼韋爾公司HG1900、HG1930系列。MEMS慣性儀表的出現,使得慣性系統應用領域大為擴展,慣性技術已不僅僅用于軍用裝備,更是廣泛用于各類民用應用中。
第四代,基于現代量子力學技術。典型代表為核磁共振陀螺、原子干涉陀螺。其目標是實現高精度、高可靠、小型化和更廣泛應用領域的導航系統。其特點是高精度、高可靠性、微小型、環境適應性強。目前,DARPA研制的核磁共振陀螺精度能達到0.01(°/h) (1σ)的水平,斯坦福大學開發的原子陀螺精度可達6×10-5 (°/h)(1σ)水平。
慣性技術國內外發展狀況?
西方發達國家代表了慣性儀表技術的國際先進水平,以陀螺技術為例,其傳統機械轉子陀螺技術在經歷了包括滾珠軸承支承、液浮支承、氣浮支承、磁浮支承、撓性支承、靜電支承在內的多種支承技術之后,已經達到非常成熟的地步;光學陀螺技術經過40余年的發展也已經達到了鼎盛時期;微機電陀螺技術以其產品在成本、尺寸和重量等方面的潛在優勢正在經歷高速發展期;新型陀螺技術也已得到重點關注和大力發展。我國在慣性技術領域與上述國際先進水平相比還存在一定的差距,主要原因在于理論研究的深度和廣度不足,基礎工業條件上的薄弱以及對慣性技術發展規律認識上欠缺。具體到技術上,體現在以下幾個方面。
1、慣性儀表技術
我國的傳統機械陀螺與國際先進水平之間的差距主要體現在儀表材料技術、超精密制造技術等基礎工業方面,在技術的成熟度方面還有較大的發展空間。光學陀螺技術方面,國內在儀表精度、電子技術、儀表環境適應性技術、市場占有率等方面相對落后。國外的微機電慣性儀表技術進展迅速,批量生產的產品已經進入戰術級應用領域,國內在這一精度領域的主導技術仍以動力調諧陀螺和光學陀螺為主,微機電慣性儀表在設計理論、制造工藝、集成電路技術、工程化技術等方面與國外相比還有相當大的差距;我國的微機電加速度計尚未開始廣泛應用,機械加速度計在精度與穩定性方面也相對落后。慣性執行機構方面,國內在磁懸浮變速控制力矩陀螺技術、陀螺/飛輪一體化技術等方面與國外先進水平相比有一定差距。我國的半球諧振陀螺技術在儀表精度與穩定性、工藝技術等方面還落后于國際先進水平。在新型慣性儀表技術的基礎研究上與國外相比也有差距。
2、慣性系統技術
我國的平臺式慣性系統技術在制造工藝水平、元器件穩定性、材料技術等方面與國際先進水平相比有一定差距,在系統的長期穩定性方面也有待提高。捷聯慣性系統技術方面,我國需要在慣性儀表精度、捷聯算法的實際性能、系統成本與體積、功能及可靠性等方面進一步提高。在陀螺監控技術方面,國內的相關研究起步較晚,在一些重點技術環節上與國際先進水平相比還有差距,應用領域也有待拓展。
3、慣性基組合技術
我國慣性基組合技術與國際先進水平的差距主要體現在研究的原創性及工程應用方面,在各種輔助信息的測量獲得、匹配理論、匹配算法等方面也落后于國際先進水平。目前,國內的慣性/衛星組合導航技術在系統的成熟度、新技術研究的驗證和應用方面有待提高;在地磁導航的數據圖精度、抗干擾補償技術方面,在星光導航的星敏感器敏感芯片技術方面,在地形導航、視覺導航的應用技術方面,與國際先進水平相比均有一定的差距。
4、慣性領域測試技術與設備
慣性測試技術領域,我國在慣性儀表尤其是新型慣性儀表的測試方法和技術、誤差來源與補償等方面的研究上與國外先進水平相比還有差距;在慣性測量裝置(IMU)與系統級的測試技術上,國內目前還主要集中在對分立標定方法的研究上,與國外的全參數一體化標定方法相比也有待提高。測試設備領域,我國在設備的角位置分辨率與測角精度、極限轉速、大載荷高動態條件下的跟蹤精度與結構剛性等方面落后于國際先進水平。
5、慣性應用技術
我國在慣性技術的應用方面與國際先進水平相比仍存在差距。在航天、航海、航空領域里,這種差距主要體現在慣性技術的應用范圍、慣性儀表與系統的精度及可靠性、系統的體積與成本等方面;在陸用領域,國內在陸用慣性系統晃動及運動基座情況下的初始對準技術實用化方面,在系統的容錯和故障診斷技術方面與國外相比有差距;在石油地質領域的高端慣性儀表技術方面有待提高;在機器人領域慣性系統的體積、長時間工作能力、精度和智能化等方面相對落后。
慣性導航技術的發展前景
1、慣性傳感器的發展前景
就全球發展現狀而言,現有的慣性傳感器已經可以滿足當前各種不同導航任務的精度指標要求。未來的主要目標是降低器件的成本、體積/重量和功耗等,具體包括以下幾個方面:
① 材料和工藝:生產廠商采用低勞動密集型生產模式和批量處理技術,選用硅片、石英、或結合光電材料(如鈮酸鋰)等新型材料,制造慣性傳感器。
② 成本:包括產品自身成本和操作維護費用。由于大規模的批量生產,慣性傳感器成本在大幅下降。
③ 體積:慣性測量傳感器在不斷向輕量化、小型化、微型化方向發展;未來一些新型的慣性傳感器將無法用肉眼識別,如:NEMS(Nano—Electro—Mechanical System)和光學NEMS 。
④ 研究熱點:一方面集中在小型化MEMS慣性器件的性能提高和有效封裝上,另一方面集中在光學傳感器上,尤其是對采用集成光學的FOG的研究。
⑤ 期望:在各個精度級別上,均能獲得尺寸小且價格低廉的慣性傳感器。
慣性傳感器的發展情況直接決定了慣性導航系統的開發和應用,慣性傳感器自身的成本、體積和功耗影響了慣性導航系統的相應參數指標。因此,慣性測量傳感器的發展須要權衡以下幾個因素:精確性、連續性、可靠性、成本、體積/重量、功耗。
2、慣性導航技術的發展方向
慣性導航系統的設計和發展須要考慮權衡的主要因素有:①必須針對并滿足應用的需求,其中導航性能(尤其是精度)和價格成本是首要的兩個特性指標。價格成本包含系統自身成本、維護成本和使用壽命。因此對于很多導航應用,合理的價格仍然被置于應用要求的最前面。導航性能包括:導航的精確性、連續性、完整性、易用性,易用性是指系統易于使用和維護、系統的自主性等。②實際的應用環境是最大的挑戰。系統的體積、功耗、可靠性和可用性會關系到慣性導航系統能否在具體的應用環境中被采用。③提高慣性導航系統的通用性,拓展應用領域。
慣性導航系統發展和技術進步呈現以下特點:
(1)在無法接收GNSS信號或需要高度導航可靠性的應用場合,高性能的自主INS仍具有不可替代的作用。
(2)GNSS技術的快速發展和進步,將取代部分傳統的INS應用領域。例如:Raytheon Anschütz采用GPS和固態速率傳感器研制的GPS羅經,可以實現0.5°(RMS)的航向精度。上海交通大學導航、制導與控制研究所研制GPS姿態測量儀,在1m基線的情況下可獲得優于0.2°的2-D姿態測量精度。
(3)INS與其他多種導航手段組合,尤其是GNSS/INS組合導航系統 ,受到普遍關注。
(4)地面車輛導航等民用市場發展迅速,價格低廉的一體化、小型化、多模式組合導航設備成為市場發展的三個重要方向,這既是慣性導航系統發展的機遇,也是挑戰。
(5)針對艦船導航系統的設計和發展:①首先從系統的性能和可靠性方面考慮,須要不斷提高慣性導航系統自身的集成度;使其具備與其他導航手段協同工作的組合導航模式,并且提供與艦船的其他操作控制或導航設備靈活接口。② 其次從降低系統成本角度考慮,很多學者嘗試采用中低精度的慣性測量傳感器或MEMS器件,通過改進導航系統配置、與其他導航手段相結合來獲得令人滿意的精度指標H 矧。③ 須要指出的是:INS首先與GNSS組合,然后再結合聲納、圖像等其他導航手段組成艦船一體化組合導航系統,是最受關注的研究熱點和發展方向。
總之,在慣性器件研究方面,體積小且價格低廉的MEMS慣性傳感器,和高精度、高性能FOG在未來一段時間仍將是受關注的焦點。受現代計算機技術快速發展的影響,平臺式導航系統將被捷聯式慣性導航系統所替代。
當前,慣性技術已經成為一國技術水平先進性的重要標志之一,其先進程度和應用水平關系到國家多個行業的信息化水平和自動化控制水平。目前慣性技術正朝著小型化、數字化、智能化、低成本、高可靠性、多領域應用的方向發展,新的應用與產品正加速涌現。隨著國民經濟和技術水平的進一步發展,未來慣性技術的應用領域也將持續擴展。
編輯:黃飛
?














 工商網監
工商網監
評論