 電子發燒友App
電子發燒友App


作者:王珍妮?楊功流?蔡慶中
美國物理學會在Physics 雜志上發布了2021 年的物理學年度亮點,其中的一大亮點是“物理學中的俏皮旋轉”,介紹了由天體物理學家肯尼思·布雷徹設計的一種新型旋轉陀螺。肯尼思·布雷徹對陀螺的興趣始于他對中子星旋轉運動的理解,中子星會發生擺動或者進動,這跟陀螺的性質是相似的。后來布雷徹教授開始自己制作陀螺,他利用數學常數設計了一個單項旋轉陀螺DeltaCELT,這種陀螺具有優先旋轉的方向。在陀螺的頂部,有兩個橢圓形的凹坑,頂部的長軸與短軸的比值為Feigenbaum 常數。這種非對稱形狀使得DeltaCELT 陀螺有一個優先的旋轉方向,當陀螺逆時針旋轉時,陀螺正常自由旋轉,當順時針旋轉時,陀螺會迅速減速到停止,并開始來回擺動,然后,它將這種搖擺運動轉換成逆時針方向的旋轉,這是一種很神奇的旋轉方式,可能會對一些數學物理的設計工作有啟發的作用。 ?
在現代物理學發展中,陀螺由于具有定軸性和進動性被應用于角速度的測量。根據牛頓第一定律,當物體不受外力作用時,有保持原有運動狀態的性質。當陀螺高速旋轉時,在沒有外界力的作用下,根據角動量守恒原理,陀螺的角速度大小和方向也都保持不變,即擁有定軸性;當在陀螺上施加外力矩時,根據牛頓第二定律,物體受到的力矩與角動量的時間變化率成正比,方向指向合外力矩方向,陀螺的動量矩矢量會以最小的速度追趕外力矩,因此陀螺會沿著角動量所在的軸向倒向外力矩的方向,進而產生陀螺進動角速度,方向可以根據右手螺旋定則確定,這就是陀螺的進動性。
基于以上原理設計的角速率測量儀器就叫作陀螺儀,1904 年,赫爾曼·安舒茨和埃爾默·斯佩里設計了世界上首個機械陀螺儀,實現了角速度的精確測量。隨后被應用于各類導航與運動控制場景中。近百年來,隨著電子科學、光學、量子科學的發展,陀螺儀技術也經歷了傳統轉子陀螺、光學陀螺、量子陀螺和諧振陀螺這幾個大的發展階段,各種各樣的陀螺儀也在國防、自動駕駛、手機防抖、游戲傳感等方面得到了廣泛的應用。下面我們逐個介紹幾種陀螺儀。
1. 傳統轉子式陀螺
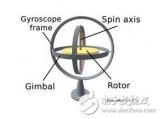
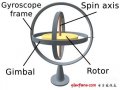
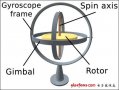
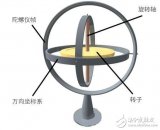
傳統轉子式陀螺是最早的陀螺儀,利用高速旋轉的陀螺具有定軸性和進動性來測量載體的角速度。在使用時,將高速旋轉的轉子固定在框架內部,使其有一個轉動自由度。這種陀螺很容易受到外部振動信號的干擾,并且轉子與支承之間也很容易產生摩擦,因此在傳統轉子式陀螺中,支承系統是很重要的一部分,決定了陀螺的精度。傳統轉子式陀螺按照其支承系統的不同分為:滾珠軸承支承陀螺、氣浮陀螺、液浮陀螺、動力調諧陀螺以及靜電陀螺等。下面將通過介紹三浮陀螺來理解這類陀螺。

圖1 傳統轉子陀螺
三浮陀螺是一種單自由度積分陀螺,其支承系統由液浮、動壓氣浮、磁懸浮三浮組成,故稱為三浮陀螺。三浮陀螺由陀螺馬達、浮子組件、角度傳感器、力矩器、磁懸浮元件、高比重浮油、寶石軸承組件、溫控組件、殼體、端蓋,連接器等組成。電機轉子采用動壓氣體支承技術,陀螺馬達運用液浮技術,磁懸浮技術用來消除陀螺浮子組件與寶石軸承的摩擦力。
圖2 三浮陀螺儀內部結構圖
工作狀態下,陀螺殼體與安裝基座固連,陀螺馬達高速旋轉形成角動量并產生陀螺效應,在沿輸入軸有角速度或力矩時,陀螺儀沿輸出軸進動。在測量過程中,陀螺電機繞陀螺的自轉軸高速旋轉,形成穩定的陀螺角動量H,當載體(基座或殼體)繞輸入軸轉動時,根據陀螺效應,由陀螺電機組成的框架組件將繞輸出軸進動,并在浮油的作用下產生阻尼力矩。穩態時,沿陀螺輸出軸的合力矩為零,浮子轉角是載體角速度ωI 的函數,通過傳感器測量浮子轉角,從而實現對載體角速度ωI 的測量。
傳統轉子式陀螺是目前工程應用中精度最高的陀螺,但其尺寸較大,主要應用于戰略級核潛艇、導彈等對精度要求較高、體積較大的場景中。
2. 光學式陀螺
光學式陀螺的理論基礎是薩格納克效應。20 世紀初,法國科學家薩格納克提出了薩格納克效應。對于一個簡單的理想圓形光路,當光路相對慣性空間沒有轉動時,在一點注入兩束相向傳播的光,兩束光在傳播一周后的光程長度相同,可以同時返回到注入點。當光回路沿順時針旋轉時,光源的注入點也會相應轉動,沿逆時針方向傳播的光波沿閉合光路傳播一周再回到光波注入點時,走過的實際光程小于2πR,沿順時針方向傳播的光經一周回到原點時經歷的光程大于2πR,光程差產生時間差,進而產生相位差。由于這兩束光頻率相同,相位差恒定,當兩束光相遇時會產生干涉,當在環路平面內有旋轉角速度時,屏幕上的干涉條紋將會發生移動,這就是薩格納克效應。
圖3 薩格納克效應示意圖
光學陀螺有激光陀螺和光纖陀螺兩種,其基本原理都是薩格納克效應,下面將介紹光纖陀螺的基本原理。
1976 年,瓦利和肖特希爾成功地制作了第一個光纖陀螺,目前,國內光纖陀螺精度已經可以做到0.001°/h。與機械陀螺相比,光學陀螺抗干擾能力強、無磨損、使用壽命長、信號可靠、動態范圍較寬,結構簡單、價格也較低。
圖4 光纖陀螺原理示意圖
以干涉型光纖陀螺為例,干涉型光纖陀螺由光源、調制器、光纖環(光纖纏繞形成,半徑為R)、耦合器和探測器這五大光學器件構成。光源發出的光經過分束器后變為兩束光,這兩束光分別從光纖環的兩端進入,反向傳輸,之后通過耦合器并產生干涉。當外界沒有轉動時,傳輸后的兩束光相位差為0,當光纖陀螺以一定的角速度Ω轉動時,由于薩格納克效應,會產生相位差:
Δφ = [(8nπ2R2/λc)]Ω
其中n 為光纖匝數;λ為光波長;c 為真空中的光速。相位解調器分析出干涉信號,得到相位差Δφ,利用上式即可求出角速度Ω。
光纖陀螺技術目前已經達到較高的水平,主要的技術指標也接近高性能慣導的需求,具有高精度、高可靠性的特點,已經廣泛地應用于捷聯式慣導中,在飛機、傳播、汽車的導航系統中都有所應用,并且在民用領域,光纖陀螺也在石油鉆井和機器人控制等領域發揮著重要作用。
3. 振動式陀螺
振動式陀螺儀是基于哥氏效應的一種陀螺儀類型,主要有半球諧振式陀螺儀和MEMS陀螺儀兩種。
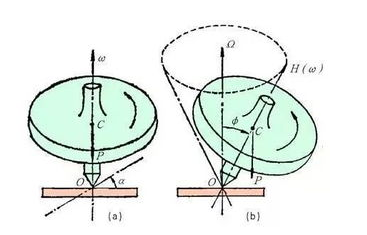
半球諧振陀螺是一種基于哥氏振動效應的固體波動陀螺儀,由激勵罩、激勵電極、諧振子、讀出電極和讀出基座構成,諧振子是其中的核心部件。半球諧振陀螺的陀螺效應是由諧振子中徑向駐波在外界旋轉激勵條件下的哥氏效應引起振型的進動來實現的,具有高精度、高可靠性和長壽命,與光學陀螺相比,其結構簡單,不易損壞,目前精度已經可以達到0.0001°/h,可以達到慣性級,屬于高精度陀螺儀,在哈勃望遠鏡上也使用了半球諧振陀螺。
圖5 半球諧振陀螺組成
半球諧振陀螺的激勵罩、諧振子以及讀出基座都是由熔融石英玻璃材料加工而成,這種材料物理和化學特性都十分穩定,品質因數高。半球諧振陀螺結構簡單,當裝配完成后,整個陀螺可以完全固連,具有非常高的抗沖擊性能,并且諧振子在受激振動時,其振動只有幾微米,因此其內部結構不會有任何破壞并且也不會有集中應力產生。半球諧振子受激產生震動,當諧振子處于二階駐波震動狀態時,會產生4 個波腹和波節,當陀螺儀沒有外界的旋轉時,波腹和波節的位置保持不變,當外界有一個角速度時,哥氏加速度會使得諧振子的振型發生變化,在沿諧振子直徑方向的振動力附加一個切向力,使得振型與諧振子的相對位置發生變化,駐波發生進動,進動角與旋轉角成正比,比例因數只與諧振子的材料屬性相關,與外界角速率大小無關。
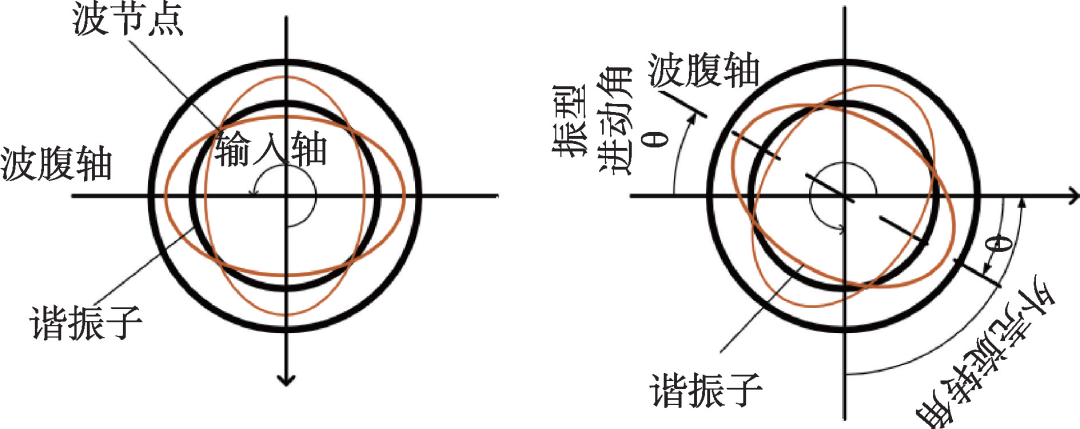
圖6 半球諧振陀螺工作原理
半球諧振陀螺有兩種工作模式,一種是力平衡模式,一種是全角模式。在力平衡模式下,屬于角速率陀螺,四波腹振型由于反饋力的作用克服哥氏力與殼體保持一致,根據所施加反饋力的大小,輸出一個電壓信號,通過轉換得到角速率值。在全角模式下,屬于速率積分陀螺,諧振子中的四波腹振型隨著外界角速度變化自由進動,通過檢測四波腹振型的方位信息來算出外界施加角速率的大小,可以直接輸出角度值。
半球諧振陀螺是目前一種很有前景陀螺儀,可以實現高精度陀螺儀的小型化、低成本等,得到了國內外慣性技術領域的很大關注。
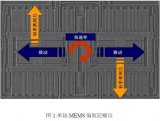
微機電(MEMS)陀螺儀是振動式陀螺的另一個分支,MEMS陀螺儀的體積小、質量輕、功耗低、成本低,在軍用和民用領域都有很廣泛的應用。
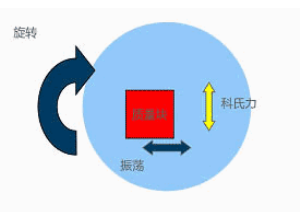
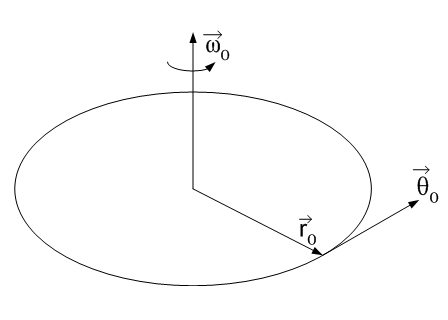
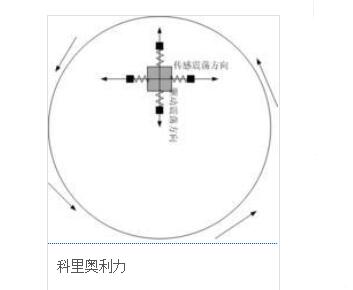
MEMS 陀螺儀的基本原理是科里奧利效應。科里奧利效應是指處于轉動參考系中的物體在運動時受到的一種慣性力,在旋轉坐標系中運動的物體會發生偏移的現象,這種偏移就是由于產生了科里奧利力。當一個質量元件在平面內做正弦振動時,如果該平面同時以一個角速度做旋轉運動,在科里奧利效應的作用下,質量元件將垂直于平面(諧振軸)做正弦振動,方向符合右手螺旋定則,振幅與角速度成正比。MEMS 陀螺是一種振動式陀螺,利用科里奧利力將陀螺的轉動轉化為垂直于平面的正弦振動,通過測量該軸的位移從而得到輸入角速率的大小。不同類型的MEMS陀螺儀就是其檢測科氏力的方式不同。
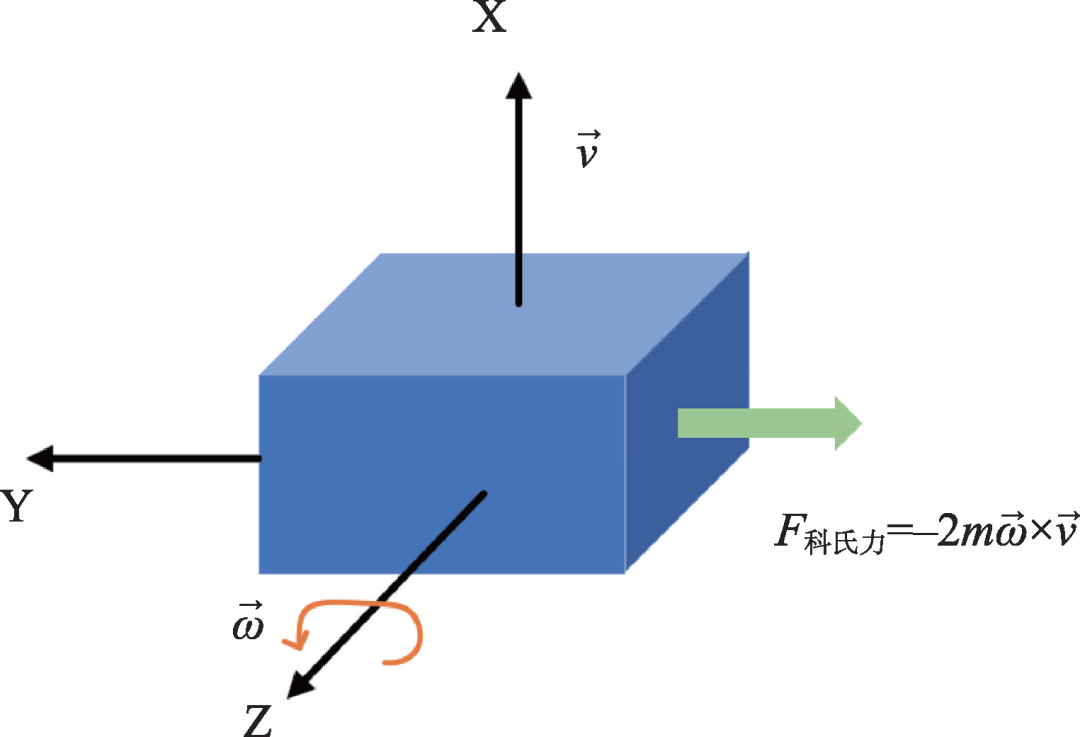
圖7 科里奧利效應
MEMS陀螺儀已經高度集成化,可以大批量生產,在數碼相機、汽車、機器人、手機等一些與我們日常息息相關的方面都有很大的應用,是陀螺儀小型化的一個很大的發展。但MEMS陀螺精度較低,主要應用于軍用戰術級市場以及民用領域。目前,MEMS陀螺的主要研究方向為結構小型化、制造工藝提升、電路的誤差補償等方面。
4. 量子陀螺儀
20 世紀量子技術發展迅速,推動了量子陀螺儀的產生。量子陀螺儀是基于量子力學原理的高靈敏角速度測量裝置,分為原子干涉式陀螺儀和原子自旋式陀螺儀兩種。量子陀螺目前還在實驗研究驗證階段,尚未形成大規模應用。
原子干涉陀螺儀核心原理與光干涉原理相似,其核心在于原子的波動性。原子具有原子波,原子波的波長極短,在室溫下約為1/100 nm,而可見光波長在400~700 nm左右,因此利用原子波可以測量更小的距離差,分辨率更高。目前,原子干涉陀螺最前沿的發展方向為冷原子團型原子干涉陀螺儀。
冷原子團型原子干涉陀螺儀具體形成方法為利用磁光阱“冷卻”原子,確保原子可以保持在磁光阱中央,冷原子團在這種情況下存在時間會變長,從而可以進行物質波干涉。之后利用激光,引導原子團在系統中向特定方向運動。當原子處于同一內態,速度一致時即可發生干涉,可以利用泵浦光改變原子內態,使用推斥光將磁場敏感狀態的原子吹走,運動過快的原子也會在上述過程中與大多數原子分離,實現速度選擇。當光學陀螺儀與原子干涉陀螺儀干涉環路面積相同時,轉動角度產生的相移比激光陀螺儀高出約10個量級。
原子自旋式陀螺儀分為核磁共振陀螺儀(NMRG)、無自旋交換弛豫陀螺儀(SERFG)以及金剛石NV 色心陀螺三種。NMRG是利用原子核自旋敏感載體轉動信息、SERFG是利用電子自旋敏感物體轉動信息、金剛石NV色心陀螺是利用空穴中電子自旋敏感載體運動。這里將重點介紹SER 陀螺儀。
無自旋交換弛豫陀螺儀是一種固態陀螺儀,角動量由原子內部的粒子即堿金屬氣室中的堿金屬原子和稀有氣體原子相互作用而產生。SERFG 的核心就是堿金屬原子的電子和稀有氣體原子的原子核。堿金屬原子由于其內部的電子分布其內部總動量和總磁矩為0,其外部有一個自由電子,因此可以將堿金屬原子看作一個自由電子。稀有氣體原子總的角動量僅為原子核自旋角動量,可以等效為一個原子核。
原子自旋陀螺儀有驅動激光、堿金屬氣室、磁屏蔽裝置、檢測激光等部分。在自然狀態下,電子和核子雜亂無章地分布,當原子外部有磁場和光場作用時,可以控制其中的電子產生自旋極化,極化的電子與核子碰撞使得核子發生自旋,由此產生了原子自旋效應。為使這一過程有定軸性,需要屏蔽外部磁場,減少外界磁場對其影響。當外界施加一個角速度,驅動激光固連在載體上并隨著載體轉動,原子受到驅動激光的控制會產生極化并且進動到驅動激光方向,由于其本身具有定軸性,電子和核子最終會產生一個偏離原方向的一個角度。檢測激光也隨著載體一起轉動,當外界有一個角速度時,電子和核子產生一個偏移的角度,檢測激光可以檢測到這一角度。電子和核子的不同指向會使得檢測激光的偏振方向發生改變,從而反映出原子自旋角度的變化,可以實現對角速度的測量。
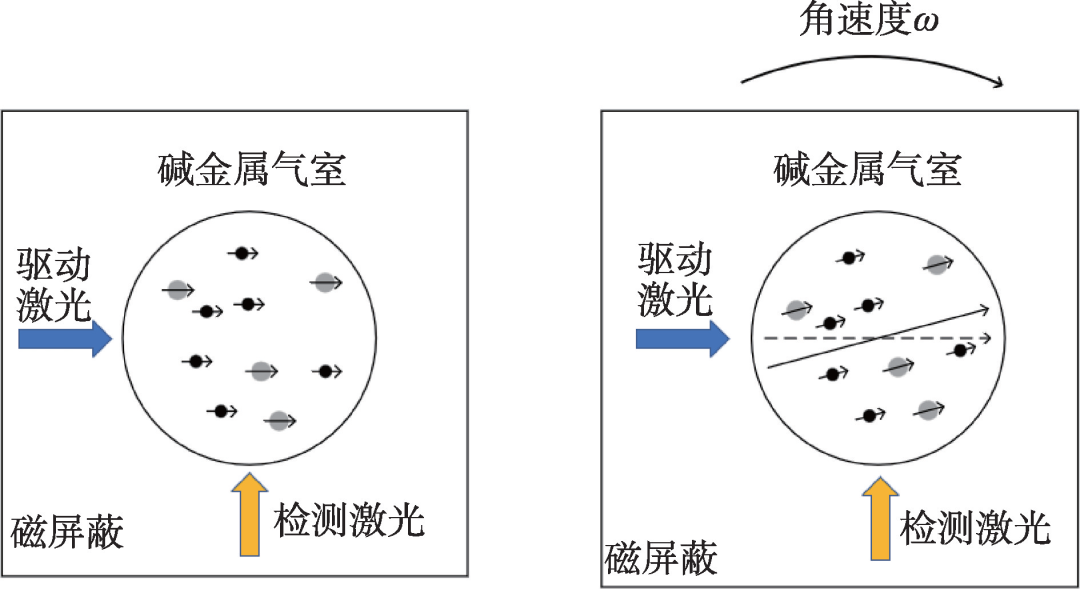
圖8 原子自旋陀螺原理圖
目前,原子陀螺儀處于實驗樣機階段,還沒有投入實際使用,但是其技術已經逐漸成熟,希望能夠盡快實現工程應用,大大提高慣性導航的靈敏度。
5. 總結
不同類型的陀螺儀由于其工作原理和結構特性的不同,其精度、原理、成本也有所不同。隨著物理學以及電子技術和計算機技術的發展,陀螺儀的精度、大小等也在隨著軍用、民用領域的需求不斷進步,各類陀螺儀也在向高精度、低成本、高可靠性等方面發展。相信單向旋轉陀螺DeltaCELT 的出現也會給新型陀螺的研制提供新的思路,并且陀螺中Feigenbaum常數的運用也給我們今后在陀螺研制的過程中提供了新的思維方法,在陀螺的設計中,我們也可以利用這些特殊的常數去設計,可能會有意想不到的效果。總之,不論是將其應用于導航還是其他的應用領域,相信更多的工程師會被這一“俏皮旋轉”所啟發,為我們的生活帶來更大的便利。
編輯:黃飛
?











 工商網監
工商網監
評論