

















| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
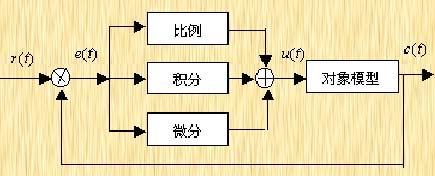
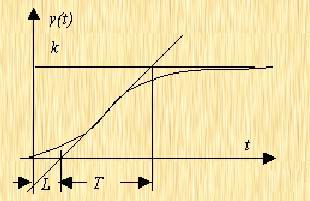
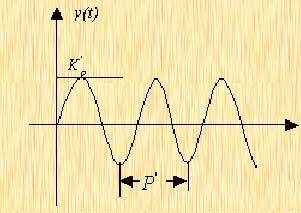
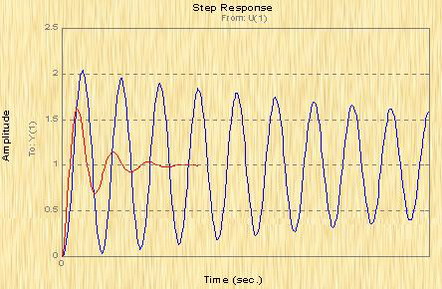
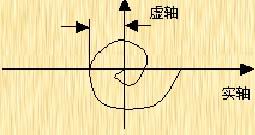
自動(dòng)控制系統(tǒng)的設(shè)計(jì)--PID校正
來(lái)源:本站整理 作者:佚名2009年07月27日 14:33
0
分享
[導(dǎo)讀] 自動(dòng)控制系統(tǒng)的設(shè)計(jì)--PID校正
關(guān)鍵詞:PID






精品文章
更多>>




推薦閱讀
- ·轉(zhuǎn)矩補(bǔ)償對(duì)單轉(zhuǎn)子壓縮機(jī)低速運(yùn)轉(zhuǎn)的影響
- ·多種工業(yè)觸摸屏的原理及特性解析
- ·伺服電機(jī)三環(huán)控制原理與MES-100控制方式
- ·多看看多學(xué)學(xué) 六個(gè)方法幫助你初學(xué)PLC
- ·工控現(xiàn)場(chǎng)中PLC控制系統(tǒng)需要注意的要點(diǎn)
- ·MCP8063三相正弦無(wú)傳感器無(wú)刷電機(jī)工業(yè)控制驅(qū)動(dòng)方案
- ·采用ARM Cortex-M0處理器內(nèi)核 英飛凌XMC1302馬達(dá)控制解決方案
- ·一篇文章帶你了解步進(jìn)電機(jī)的驅(qū)動(dòng)方式
每月人物

正面迎戰(zhàn)智慧家庭:從稱體重到“稱”健康,芯海智慧測(cè)量全包
隨著科技的發(fā)展,人們對(duì)生活質(zhì)量的追求越來(lái)越高,傳統(tǒng)的家庭生活方式已經(jīng)無(wú)法滿足現(xiàn)代人的家居生活,智慧家庭的新型生活理念成為很多人夢(mèng)寐以求的...

依托AI平臺(tái),涂鴉智能開(kāi)啟全屋智能2.0時(shí)代!
隨著物聯(lián)網(wǎng)技術(shù)的突飛猛進(jìn),生活中越來(lái)越多的家庭設(shè)備將會(huì)聯(lián)上網(wǎng)絡(luò),變得“智慧”起來(lái),智慧家庭的概念成了這幾年媒體、企業(yè)、用戶關(guān)注的焦點(diǎn),而...
每周排行
創(chuàng)新實(shí)用技術(shù)專題

資料下載
精品文章
- ·工業(yè)機(jī)器人技術(shù)科普及全球知名企業(yè)盤(pán)點(diǎn)
- ·最新知名廠商電機(jī)控制解決方案集錦
- ·工程師電子制作故事:光線探測(cè)器DIY設(shè)計(jì)
- ·工業(yè)控制之伺服系統(tǒng)精選開(kāi)發(fā)資料
- ·FPGA設(shè)計(jì)五大優(yōu)勢(shì) 凸顯工業(yè)應(yīng)用靈活性
- ·掃地機(jī)器人室內(nèi)定位技術(shù)解析
- ·中國(guó)機(jī)器人現(xiàn)狀:核心技術(shù)缺失 ,與人共融成突破點(diǎn)
- ·低成本FPGA搭橋,多通道高清SDI DVR全升級(jí)
- ·飛思卡爾機(jī)器視覺(jué)與智能攝像頭解決方案
- ·工業(yè)攝像機(jī)與傳感器領(lǐng)域 以太網(wǎng)技術(shù)優(yōu)勢(shì)明顯

 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
用戶評(píng)論
共 0 條評(píng)論