 電子發(fā)燒友App
電子發(fā)燒友App


二級倒立擺的模糊控制研究
1 引言
??? 在控制理論發(fā)展的過程中,某一理論的正確性及實(shí)際應(yīng)用中的可行性都需要一個(gè)按其理論設(shè)計(jì)的控制器控制一個(gè)典型對象進(jìn)行驗(yàn)證。倒立擺就是這樣一個(gè)被控制對象。倒立擺系統(tǒng)是一個(gè)多變量、快速、非線性和自然不穩(wěn)定系統(tǒng),在控制過程中該系統(tǒng)能有效反映控制中的許多關(guān)鍵問題,如非線性問題、系統(tǒng)的魯棒性問題、隨動(dòng)問題、鎮(zhèn)定問題及跟蹤問題等。倒立擺在控制理論研究中是一種較為理想的實(shí)驗(yàn)裝置。小車倒立擺系統(tǒng)的控制目標(biāo)是倒立擺通過小車能夠穩(wěn)定在有限長度的導(dǎo)軌上而不倒下,從而達(dá)到動(dòng)態(tài)平衡。本文針對二級倒立擺非線性模型,基于Maminadi模型,通過設(shè)計(jì)融合函數(shù)來設(shè)計(jì)模糊控制器,有效解決規(guī)則爆炸問題,實(shí)現(xiàn)二級倒立擺的有效控制。
2 二級倒立擺的數(shù)學(xué)模型的建立
??? 二級倒立擺由小車、擺桿、水平導(dǎo)軌等組成,小車由伺服電機(jī)、皮帶輪、傳動(dòng)帶帶動(dòng)在水平導(dǎo)軌上左右運(yùn)動(dòng),上下擺可繞各自的轉(zhuǎn)軸在水平導(dǎo)軌所在的鉛垂面內(nèi)自由轉(zhuǎn)動(dòng)。小車和上下擺桿間通過軸承連接,每個(gè)軸承連接處固定有電位器,分別用以檢測兩根擺桿與鉛垂線的角度偏移。小車相對軌道中心點(diǎn)的偏移位置也由固定在皮帶輪軸上的電位器檢測。
??? 其基本原理為:角度、位置信號經(jīng)檢測電路獲取后,再由微分電路得到相應(yīng)的微分信號,這些信號經(jīng)A/D轉(zhuǎn)換器轉(zhuǎn)換為數(shù)字信號傳輸至計(jì)算機(jī)。通過已設(shè)計(jì)的控制程序計(jì)算控制力所需電壓值,經(jīng)D/A轉(zhuǎn)換器轉(zhuǎn)換為模擬信號,功率放大后驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn),電機(jī)再用皮帶拖動(dòng)小車在導(dǎo)軌上往復(fù)運(yùn)動(dòng)實(shí)現(xiàn)對倒立擺的有效控制。忽略空氣阻力和各種摩擦,并認(rèn)為擺桿為剛體。圖1為二級倒立擺示意圖。
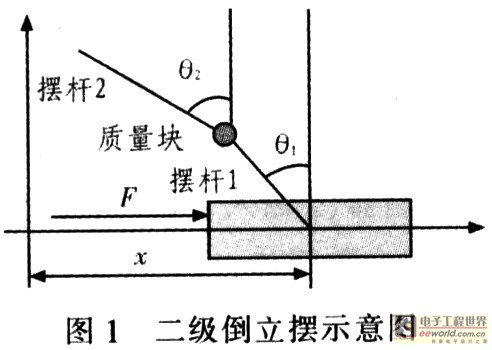
??? 倒立擺參數(shù)定義如下:M為小車質(zhì)量,0.584 kg;m1為擺桿1質(zhì)量,0.05 kg;m2為擺桿2質(zhì)量,0.13 kg;m3為擺桿3質(zhì)量,0.236 kg;l1為擺桿1中心到轉(zhuǎn)動(dòng)中心的距離,0.077 5 m;l2為擺桿2中心到轉(zhuǎn)動(dòng)中心的距離,0.25 m;θ1為擺桿1與豎直方向的夾角;θ2為擺桿2與豎直方向的夾角;F為作用在系統(tǒng)上的外力;g為重力加速度,9.8 m/s2。
??? 利用拉格朗日方程推導(dǎo)運(yùn)動(dòng)學(xué)方程,拉格朗日方程為:
??? ![]()
式中,L為拉格朗日算子,q為系統(tǒng)的廣義坐標(biāo),T為系統(tǒng)的動(dòng)能,V為系統(tǒng)的勢能。
??? 
式中,i=1,2,3…,n,fi為系統(tǒng)在第i個(gè)廣義坐標(biāo)上的外力。
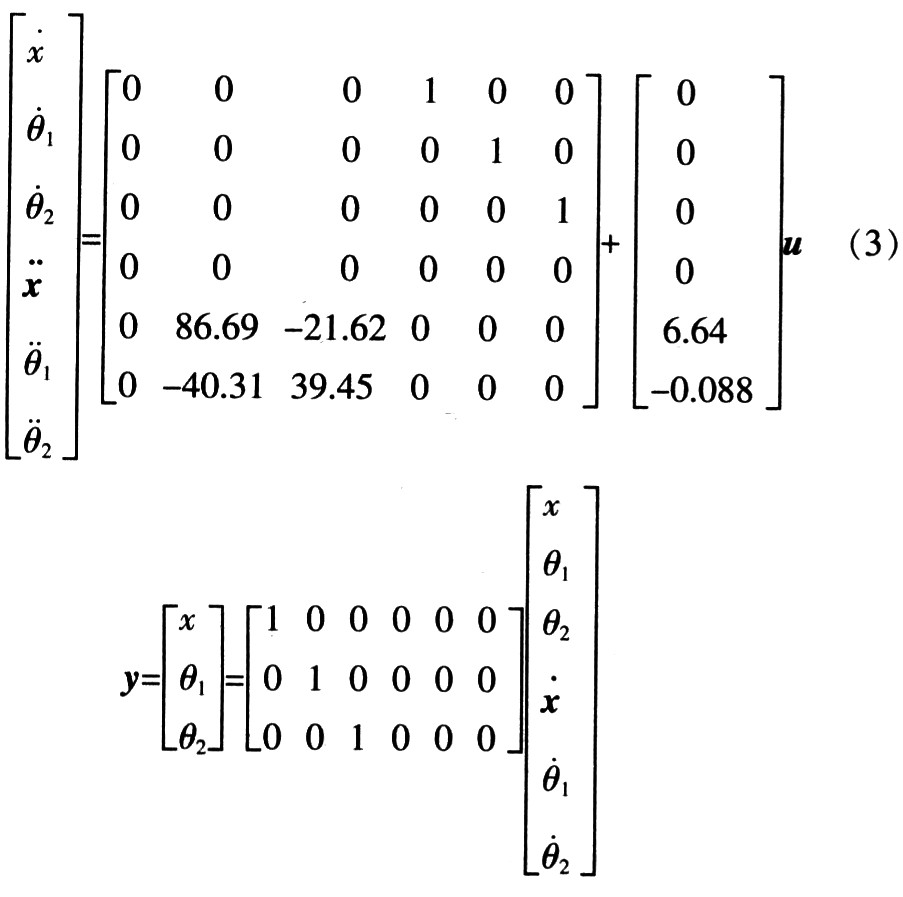
??? 在二級倒立擺系統(tǒng)中,系統(tǒng)的廣義坐標(biāo)有3個(gè),分別為x,θ1,θ2。經(jīng)計(jì)算并線性化并帶人參數(shù)值得到系統(tǒng)的狀態(tài)空間方程:
??? 
3 二級倒立擺模糊控制系統(tǒng)的設(shè)計(jì)與仿真
??? 二級倒立擺系統(tǒng)控制目標(biāo)較多,包括小車位移,下擺擺角,上擺擺角。傳統(tǒng)的模糊控制器采用系統(tǒng)誤差,誤差的導(dǎo)數(shù)作為輸入,若用傳統(tǒng)模糊控制控制二級倒立擺,則模糊控制器有6個(gè)輸入:小車位移、小車速度、下擺擺角、下擺角速度、上擺擺角和上擺角速度。
??? 若對每個(gè)輸入變量定義5個(gè)模糊子集,控制規(guī)則最多有56個(gè),模糊控制規(guī)則設(shè)計(jì)復(fù)雜,可調(diào)參數(shù)非常多,不利于模糊規(guī)則的完整制定,這就是在使用模糊控制研究多變量非線性系統(tǒng)時(shí)的所謂“規(guī)則爆炸(Rule Explosion)”問題。然而,如果用3組二維模糊控制器(2輸入1輸出)通過串行或并行設(shè)計(jì)控制器,由于控制器個(gè)數(shù)增加,大大降低控制實(shí)時(shí)性,甚至由于不能及時(shí)輸出當(dāng)前控制作用力而失控。
3.1 倒立擺控制合成變量
??? 本文是將最優(yōu)控制理論與模糊控制相結(jié)合而采用的一種融合技術(shù)。它是把小車的位移、上擺擺角、下擺擺角綜合成一個(gè)變量E,將小車的速度、上擺的角速度、下擺的角速度綜合成一個(gè)變量EC,E和EC作為模糊控制器的輸入,電壓u作為輸出,減少模糊控制器的輸入,解決規(guī)則爆炸的問題,由此設(shè)計(jì)Mamdani型模糊控制器。
??? 通過LQR仿真,得出輸入輸出數(shù)據(jù)對,根據(jù)得到的數(shù)據(jù)計(jì)算并制定模糊規(guī)則。
??? 對于嵌套函數(shù)Y=f2[f1(x)],先使f1(x)對輸入變量作初步處理,再利用算法f2(x)根據(jù)前級算法的輸出進(jìn)行控制。f1稱為融合函數(shù),f2稱為作用函數(shù)。
??? 首先利用最優(yōu)控制理論中的LQR求得系統(tǒng)的狀態(tài)反饋系數(shù)K和狀態(tài)向量x:
??? ![]()
??? 為實(shí)現(xiàn)變量融合,分別選取兩個(gè)反饋系數(shù)為控制主元,其他輸入變量可根據(jù)與主元的相關(guān)性和可融合性分別歸并到兩主元中。對于二級倒立擺,由于擺桿2的控制難度最大,分別選擇θ2、θ2為控制主元,相應(yīng)系數(shù)為:kθ=kθ2,kθ=kθ2融合函數(shù)的輸出向量為:
??? 融合函數(shù)的輸出方程為:
??? 
??? 通過把輸入狀態(tài)變量降維,得到角度誤差E和角速度誤差EC:
??? 
??? 通過信息融合,將系統(tǒng)的6個(gè)狀態(tài)變量化為2個(gè)狀態(tài)變量,減少系統(tǒng)的輸入,實(shí)現(xiàn)模糊控制器的降維。由降維后得到的2個(gè)變量E和EC做為模糊控制器的輸入,設(shè)計(jì)一個(gè)二維Mamdani型的模糊控制器。利用最優(yōu)控制求得K。最優(yōu)控制性能指標(biāo)函數(shù)為:
??? 
??? 使式(7)為最小,可求得:
??? ![]()
??? 求解如下Ricatti方程可得到矩陣P:
??? ![]()
??? 性能指標(biāo)函數(shù)中,定義矩陣Q和矩陣R用來平衡系統(tǒng)對輸入量和狀態(tài)量的敏感程度。它們對閉環(huán)系統(tǒng)的動(dòng)態(tài)性能影響很大。
??? 在倒立擺系統(tǒng)中,Q,R分別用來對狀態(tài)向量x和輸入控制量u進(jìn)行平衡加權(quán)。一般情況下,P增加時(shí),控制力減小,角度變化變小,跟隨速度變慢。而Q中某元素增加時(shí),其對應(yīng)的狀態(tài)變量的響應(yīng)速度也增加,其他狀態(tài)變量的響應(yīng)速度相對減慢。為了使得反饋矩陣K更合理,對矩陣Q,R的選取一定要盡量恰當(dāng)。通過反復(fù)測試,實(shí)際系統(tǒng)的控制過程選取Q=diag[500 700 700 0 0 0],R=1。
??? 根據(jù)二級倒立擺的參數(shù),基于MATLAB強(qiáng)大的矩陣運(yùn)算及其豐富的內(nèi)部函數(shù),利用K=lqr(A,B,Q,R)命令計(jì)算,可得到狀態(tài)反饋矩陣K:
??? ![]()
??? 
??? 從而得到綜合誤差E和綜合誤差變化率EC。
3.2 降維后設(shè)計(jì)二維Mamdani型模糊控制器
??? 輸入變量E、EC,輸出變量u;E、EC論域設(shè)定:E=[-6,6],EC=[-6,6],輸出論域U=[-1,1]均采用三角型、全交迭、均勻分布隸屬度函數(shù)。每個(gè)變量用5個(gè)模糊子集{NB NS ZE PS PB}來描述,隸屬度函數(shù)曲線圖如圖2、圖3所示。EC的隸屬度函數(shù)曲線同E的隸屬度函數(shù)曲線。

??? 模糊推理采用Mamdani最小運(yùn)算規(guī)則。根據(jù)輸入、輸出論域上的模糊語言變量劃分NB(負(fù)大),NS(負(fù)小),ZE(零),PS(正小),PB(正大),設(shè)計(jì)模糊推理規(guī)則如圖4所示。
??? 模糊控制器采用重心法實(shí)現(xiàn)非模糊化,與一般采用的最大隸屬度法相比較,重心法具有更加平滑的輸出推理控制。通過以上分析和試驗(yàn),并恰當(dāng)?shù)剡x擇模糊邏輯系統(tǒng)的參數(shù),從而設(shè)計(jì)一個(gè)適合被控對象的模糊控制器,如圖5所示。圖5中,Ke、Kec為量化因子,Ku為比例因子,State-Space為系統(tǒng)的狀態(tài)空間方程,Saturation為限幅模塊,Scope為示波器模塊。根據(jù)以上工作,在Simulink環(huán)境中對二級倒立擺系統(tǒng)進(jìn)行仿真,其仿真曲線如圖6所示。

4 結(jié)束語
??? 二級倒立擺是典型的多輸入、非線性、強(qiáng)耦合系統(tǒng)。通過設(shè)計(jì)融合函數(shù)降低控制器的輸入維數(shù),用模糊控制解決多輸入系統(tǒng)時(shí)遇到的模糊規(guī)則爆炸問題,使設(shè)計(jì)的實(shí)用模糊控制器成為可能。融合函數(shù)的設(shè)計(jì)方法還可推廣應(yīng)用到一級、三級倒立擺系統(tǒng)中。該模糊控制器設(shè)計(jì)切實(shí)可行,能較好地控制系統(tǒng),達(dá)到較好的控制效果。模糊控制具有魯棒性和穩(wěn)定性好、算法簡單等特點(diǎn),應(yīng)用在實(shí)時(shí)性要求較高的場合,該控制方法也可應(yīng)用到其他多變量、非線性系統(tǒng)的控制問題。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論