

















本文利用測量誤差改變調節器的步長,實現PID參數的自動整定,使輸出值平穩快速地達到設定值。首先將采樣值與給定值的誤差絕對值分成若干個區間,各區間設定不同的步長,采用不同的計算式。這里PID參數的調整周期應小于采樣周期,采樣周期由整個放大電路的傳輸延時和后續A/D轉換器的性能指標決定。
3.4 中斷服務程序
中斷服務程序流程圖如圖8所示。
4 實驗結果與分析
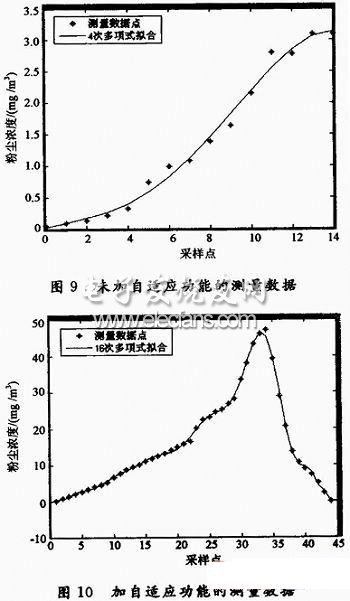
實驗時對煙霧釋放出的粉塵濃度進行了測量。圖9和圖10分別是未加自適應測量功能和加了自適應測量功能測得的粉塵濃度值及其擬合曲線。圖中“*”是采樣得到的粉塵濃度值;“——”是用Matlab對測得的數據點進行擬合后的曲線。由圖9可以看出,當粉塵濃度達到3.1 mg/m3時,濃度不再變化,儀器達到飽和。由圖10可知:濃度較低時,儀器的響應曲線線性度較好,能夠完整地反應粉塵濃度的變化過程,可測得48 mg/m3的濃度值,測量范圍大大地擴大了。采用PID加以控制,數據的平滑度較好,幾乎沒有超調,測量值能夠平穩的上升,達到了預期的效果。
5 結語
通過實驗驗證,采用這種自適應測量的方法可以使測量范圍達到0.01~48 mg/m3。采用PID參數的自校正調節,可以使測量曲線平穩地過渡到設定值。PID控制結果幾乎沒有超調,穩定時間短,在設定的目標角度值附近振蕩少,有效抑制了調節傳感器接收靈敏度時引起的振蕩。









 工商網監
工商網監
用戶評論
共 0 條評論