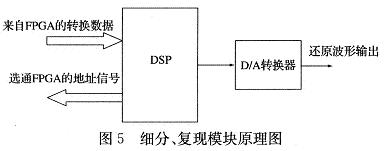
����DSP�cFPGA�Ĺ�ŵ���z��������̖(h��o)̎��
0 �� ��
������ʯ�͵���̽�У������xͨ�^(gu��)����z�����ɼ���̖(h��o)������z�����Ǟ��˽��պ�ӛ䛵����O(sh��)Ӌ(j��)��һ�N���ܵęC(j��)е����ӽM���b�ã��ǵ���̽��(sh��)��(j��)�ɼ��е���Ҫ�h(hu��n)��(ji��)�������ܺÉ�ֱ��Ӱ푵���ӛ��|(zh��)���͵����Y�ϵĽ�ጹ�������ł��м��g(sh��)�İl(f��)չ��z�������O(sh��)Ӌ(j��)�ṩ���������ֶΡ�������̖(h��o)̎�����g(sh��)�Ծ����ڵ��ٶȵ���̖(h��o)̎�����mȻ�y(c��)�������^�ߣ������(d��ng)�B(t��i)�����y�ԝM�����(d��ng)��̖(h��o)�z�y(c��)�ȸ���׃����̖(h��o)��̎��Ҫ�����O(sh��)Ӌ(j��)��һ�N����DSP�cFPGA�Y(ji��)�ϵĹ�����(d��ng)��̖(h��o)̎��ϵ�y(t��ng)������Ҫ��Ɍ�(du��)�������(d��ng)������ݔ���ă�·���������Ҳ���̖(h��o)�IJɼ���Ӌ(j��)��(sh��)���߱���(x��)�ֵȣ��Ķ���(sh��)�F(xi��n)�ˌ�(du��)���ٵ����(d��ng)��̖(h��o)�ď�(f��)�F(xi��n)��
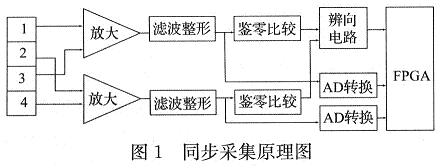
����1 ��ŵ���z�����Ĺ���ԭ��
������ŵ���z������Ҫ�ɹ�Դ(����ɫ��)����(zh��n)ֱ�R����늳ء�ָʾ���(�����)������C����(�����)�M�ɡ�����C����(�����)��z�����ĿɄ�(d��ng)���֣����Ϗ���Ƭ������Ƭ֧�Ρ������r(sh��)���z�����⚤ͨ�^(gu��)�z����β��c����B�Ӳ��̶�����(d��ng)����ܵ���Դ���l(f��)���������������������(d��ng)���z�����⚤Ҳ�S֮����(d��ng)��������������ڏ���Ƭ�ď��Ժͱ����đT�ԣ��б��ֽ^��(du��)����(d��ng)��څ��(sh��)���Ķ��a(ch��n)���˹�������c�⚤������(du��)�\(y��n)��(d��ng)��Ҳ�����f(shu��)��Ÿ��е�������c����ʽָʾ���֮�g�a(ch��n)��������(du��)�\(y��n)��(d��ng)���ɉK�B����һ��Ĺ�ž���������(du��)�\(y��n)��(d��ng)Ҳ�͕�(hu��)�a(ch��n)���c֮����(du��)��(y��ng)��Ī���l�y���Ķ�����λ���90����Ă�(g��)��늳��Ϯa(ch��n)��Ī���l�y��׃�������ǹ���̖(h��o)���D(zhu��n)�������̖(h��o)���ٽ�(j��ng)��ַŴ���γɃ�·��λ���90������һ����Ҳ���̖(h��o)��
����2 �������(d��ng)��̖(h��o)��ͬ���ɼ�
����Ҫ���C����(g��)ϵ�y(t��ng)��(du��)���(d��ng)��̖(h��o)�Č�(sh��)�r(sh��)��(f��)�F(xi��n)���P(gu��n)�I��Ҫ���C��(du��)��·ģ�M���Ҳ���ͬ���ɼ�����ʹ��DSPֱ�ӿ��ƶ�ͨ����ģ��(sh��)�D(zhu��n)�Q�������ھ����Z(y��)�Ե����Y(ji��)��(g��u)�͆�(g��)ģ��(sh��)�D(zhu��n)�Q������ͬ�r(sh��)�ɘӱ��ֵ����ƣ���(du��)�ڶ�·��̖(h��o)�IJɼ�ֻ�ܷ֕r(sh��)��ͨ�����ɼ����@�ӌ�(du��)ͬһ�c(di��n)�ă�·ģ�M���IJɼ��϶���(hu��)�a(ch��n)����λ��@�ӌ�(du��)��(f��)�F(xi��n)����(l��i)��ԭ���(d��ng)��̖(h��o)��(hu��)����ஔ(d��ng)���ʧ�档��������FPGA�ľ����Z(y��)��VHDL��(zh��)�Еr(sh��)�Dz��l(f��)��(zh��)�еģ������ܵ�����?c��)����Y(ji��)��(g��u)�еľ�������Ӱ푡�����(j��)�������c(di��n)����(du��)�ڱ�ϵ�y(t��ng)���O(sh��)Ӌ(j��)���Էֳ�����(g��)�����M(j��n)�̣��քe��2��(g��)�����̖(h��o)�ɼ����M(j��n)�̺�һ��(g��)�ӜpӋ(j��)��(sh��)�����M(j��n)�̡�
����AD�D(zhu��n)�Q���x�õ���LINEAR��˾���a(ch��n)��LTC1606��ԓ�����Ǿ��вɘӱ��ֹ��ܵ�16λ250kHzADC��ԓADC�ֱ��ʸߣ��ɘ����ʸߡ�����С�����ڸ߾��ȵĔ�(sh��)��(j��)�ɼ�ϵ�y(t��ng)�ЏV����(y��ng)�á�
����������(d��ng)Ī���l�y����̖(h��o)�ɼ����ó�ֱ�����е���λ���90����Ă�(g��)��늳أ��քeӛ��1��2��3��4����D1��ʾ�����������ɱ��y(c��)���(d��ng)��̖(h��o)�{(di��o)�Ƶ�Ī���l�y����ͨ�^(gu��)���(d��ng)�Ŵ��������ΞV����ݔ����·������������̖(h��o)���@��·��̖(h��o)�ֳɃɽM������һ�M��(j��ng)�^(gu��)�b����^�·�D(zhu��n)�Q�ɷ�����������·��FPGA�мӜpӋ(j��)��(sh��)���ṩӋ(j��)��(sh��)�ۼ�ֵ�ͱ�����̖(h��o)����һ�M�tֱ�ӌ��Ŵ��ģ�M늉���̖(h��o)�����·AD�D(zhu��n)�Q���D(zhu��n)�Q�ɔ�(sh��)����������FPGA����FPGA���_(k��i)��3��(g��)�p��RAM�惦(ch��)���Á�(l��i)�����ÿһ�c(di��n)��������Ӌ(j��)��(sh��)ֵ�̓�·���εĔ�(sh��)��������DSP�M(j��n)�и߱���(x��)���ṩ���A(ch��)��(sh��)��(j��)��
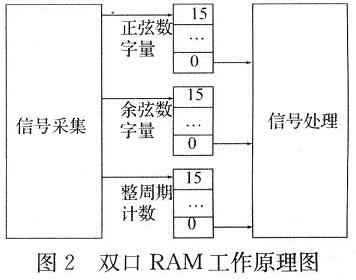
����2��1 �p��RAM���O(sh��)Ӌ(j��)
�����p��RAM�dz�Ҋ(ji��n)�Ĺ���ʽ��˿ڴ惦(ch��)�����p��RAM�������c(di��n)�Ǵ惦(ch��)��(sh��)��(j��)������һ��(g��)�惦(ch��)�������ת�(d��)���ĵ�ַ����(sh��)��(j��)�Ϳ��ƾ������S�ɂ�(g��)��(d��)����CPU�������ͬ�r(sh��)�������L��(w��n)�惦(ch��)��Ԫ������Ӳ���p��RAM�ӿڕr(sh��)���(f��)�s���ɱ���Ҳ��(hu��)�oϵ�y(t��ng)����(l��i)����(w��n)���ԣ���˱�����FPGA���O(sh��)Ӌ(j��)��һܛRAM���Á�(l��i)���_��(sh��)��(j��)�ɼ��c̎��֮�g�a(ch��n)���Į����r(sh��)�
�����乤��ԭ����D2��ʾ�����O(sh��)Ӌ(j��)�Ĵ惦(ch��)���g��3��(g��)16���������p��RAM����(d��ng)��̖(h��o)�ɼ��������µ�ַ����ÿһ��(g��)���(d��ng)�c(di��n)������(g��)��Ϣ���r(sh��)(�D����ʾ��ַ��15)����̖(h��o)̎�����քt�xȡ��ǰ���(d��ng)�c(di��n)������(g��)��Ϣ���M(j��n)�м�(x��)�ֵ�̎��(�D����ʾ��ַ��0)����(d��ng)�p��RAM���M��(sh��)��(j��)����ַָ��֕�(hu��)���¶�λ����ַ�����µĔ�(sh��)��(j��)���@�N����Y(ji��)��(g��u)���O(sh��)������(hu��)�Gʧ��Ϣ�c(di��n)�����C��߀ԭ��̖(h��o)���B�m(x��)�ԺͿɿ��ԣ��mȻ߀ԭ��̖(h��o)����Դ��̖(h��o)3��4��(g��)�ֵĕr(sh��)�g�������C��ÿһ��(g��)�c(di��n)����(g��)��Ϣ����ͬ���ԣ��@��C�Z(y��)�Ե����Y(ji��)��(g��u)�Z(y��)�����o(w��)���_(d��)���ġ�
����2��2 �p��RAM�����̈D�O(sh��)Ӌ(j��)
���������Ƕ��x��(sh��)�w�c�ⲿ�˿ڣ������r(sh��)犡�ݔ��ݔ�����x����ַ�˿ڡ����������÷քe�ǣ�
����1)�r(sh��)状˿ڣ����Õr(sh��)犵��}�_߅��(l��i)�|�l(f��)�x���M(j��n)�̣�ʹ�����f��(sh��)��(j��)���p��RAM�н����M(j��n)����
����2)ݔ��ݔ���˿ڣ��քe��16λ��λʸ����ͣ��Á�(l��i)���C�c16λAD��DSP�Ĕ�(sh��)��(j��)��ʽƥ�䡣
����3)�x����ַ�˿ڣ�2λ��λʸ����ͣ��Á�(l��i)�O(sh��)��16λ�ֵĴ惦(ch��)�������������x��RAM�����r(sh��)�ṩ��ַ�xַ��̖(h��o)��
��������Ƕ��x�Y(ji��)��(g��u)�w���������x��(n��i)�����_��ַ��̖(h��o)�������x��һ��(g��)������16�ֵ�Mem(�惦(ch��)�����)��׃����
��������Dz��l(f��)�M(j��n)�̵Ķ��x���������M(j��n)�̺��x�M(j��n)�̵Ķ��x���ԕr(sh��)犵��}�_��̖(h��o)����������̖(h��o)��(l��i)�|�l(f��)�M(j��n)�̵Ć���(d��ng)��ÿһ��(g��)�r(sh��)��������һ�Ό�(du��)RAM���x�������Еr(sh��)��l����FPGA����(j��)AD�IJɘ��ٶȺ�DSP��̎���ٶȁ�(l��i)�O(sh��)����Ҫ���C��(d��ng)�ɼ���̖(h��o)����β��ַ�ĕr(sh��)�̣�����Ҫ���C��ַ�ѽ�(j��ng)��DSP���xȡ���D3���p��RAM�������̈D��
����2��3 �p��RAM�ķ���Y(ji��)��
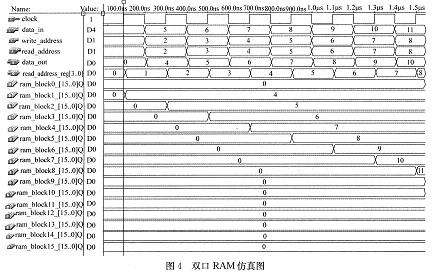
�����D4��ԓ�M(j��n)�̵ķ���r(sh��)��D���ɈD��Ҋ(ji��n)��һ��(g��)�r(sh��)犵�������?c��i)?sh��)��(j��)ݔ��˿�data_in��ֵ��4���@�r(sh��)���xͨ�˿�write_address�xͨ��ַ1��Ȼ��(du��)��(y��ng)����ַ1�Ĵ惦(ch��)��ģ�Kram_block1�ă�(n��i)��ֵ�ڴ˿�ˢ��4���@�f(shu��)�����M(j��n)�����_��ͬ�r(sh��)��(y��ng)ע��x��ַ�xͨ��̖(h��o)read_address��ֵ�����f���x��ַ�Ĵ���read_address_reg�У�read_address_reg�е�ֵ��ˢ��1����(d��ng)?sh��)�һ��(g��)�r(sh��)犵��½��ص���(l��i)�r(sh��)����̖(h��o)ݔ���˿�data_out����(j��)�x��ַ�Ĵ���read_address_reg�еĵ�ֵַ1�xͨram_block1���˕r(sh��)data_out��ֵˢ��4���@�f(shu��)���x�M(j��n)��Ҳ���_��
����3 DSP��ܛ����(x��)��
�������ô�(sh��)����Ӌ(j��)��(sh��)�cС��(sh��)��(x��)��Ӌ(j��)��(sh��)��ܛ����(x��)�ּ��g(sh��)�����д�(sh��)Ӌ(j��)��(sh��)�nj�(du��)Ī���l�y�����ڔ�(sh��)�M(j��n)�п���ļӜpӋ(j��)��(sh��)���@���ֹ����вɼ�ģ�K�е�FPGA��(l��i)��ɣ�С��(sh��)Ӌ(j��)��(sh��)�nj�(du��)Ī���l�y����һ��(g��)������̖(h��o)��(x��)�ֽY(ji��)���M(j��n)��Ӌ(j��)��(sh��)���书����DSP��(l��i)��ɡ��\(y��n)��ĽY(ji��)�����(sh��)Ӌ(j��)��(sh��)�Y(ji��)�����Թ�Ŗž��cС��(sh��)Ӌ(j��)��(sh��)�Y(ji��)�����Լ�(x��)�֮�(d��ng)��֮�ͣ����м�(x��)�֮�(d��ng)�����Ŗž���Լ�(x��)�ֱ���(sh��)��ԓģ�K��Ӳ��ԭ��D��D5��ʾ��
����ͨ�^(gu��)DSP�ĵ�ַ�xͨ�������xͨ�xȡFPGA������(g��)��(sh��)��(j��)����^(q��)�еĔ�(sh��)��(j��)������^(q��)�քe��Ń�·ģ�M��̖(h��o)�Ĕ�(sh��)�����c�ӜpӋ(j��)��(sh��)�����ۼ�Ӌ(j��)��(sh��)ֵ��Ȼ�����ù�ʽR=N*w+K*L�������һ�c(di��n)�C���ӵķ�ֵ��ݔ����ʽ��N�������ڵ��ۼ�Ӌ(j��)��(sh��)ֵ��W���Ŗž࣬K�鼚(x��)��Ӌ(j��)��(sh��)��L=W��M��M�鼚(x��)�ֱ���(sh��)��ԓ��(x��)��ģ�K��Ҫ����Ɍ�(du��)��(x��)��Ӌ(j��)��(sh��)Kֵ���ͷ�ֵRֵ����ȡ������Ɍ�(du��)��ֵ�Ĕ�(sh��)�����D(zhu��n)�Q��ݔ����
�������м�(x��)�ַ���Ҳ���nj�(du��)Kֵ����ȡ�����˰�����ֵ�ָ������(j��)���������O(sh��)Ӌ(j��)�˼�(x��)�ֱ���(sh��)��׃�ļ�(x��)���㷨������DSP C�Z(y��)�ԵČ��Î�(k��)����(sh��)��(sh��)�F(xi��n)�˼�Ӌ(j��)����㷨����(x��)���㷨������D6��ʾ��
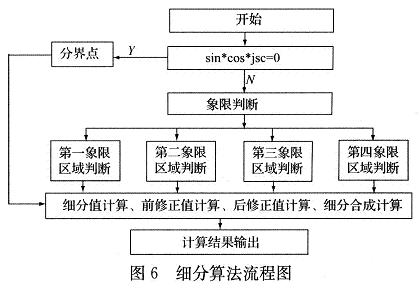
�����ɷ�ֵ��(x��)�ַ���֪��ܛ����(x��)���㷨�O(sh��)Ӌ(j��)���P(gu��n)�I��(w��n)�}�Ǹ���(j��)��·��̖(h��o)�ı�ֵ��(du��)ԓ�c(di��n)����λ�ǵ����_��λ��ԓ�c(di��n)��λ���ЃɷN��r��һ�N�����ڸ�����߅���ϣ���һ�N�����ڸ�����֮�С�����(j��)��(x��)��߅��l���Д�ԓ�c(di��n)�IJɘӔ�(sh��)��(j��)�Ƿ�l(f��)�����Ă�(g��)���ķֽ羀�ϣ�����Д�˴ΓQ��l(f��)�������ķֽ羀�ϣ��t��(x��)��?j��n)?sh��)��̶�ֵ������ͨ�^(gu��)������ؓ(f��)�P(gu��n)ϵ�Ϳ��Դ_�����w��(x��)��?j��n)?sh��)ֵ������Ҫ�M(j��n)�Џ�(f��)�s��Ӌ(j��)�㡣���ԓ�c(di��n)���ǰl(f��)�������ֽ羀�ϣ��t�����(j��)������ؓ(f��)�P(gu��n)ϵ�Д��Q��l(f��)���ľ��w���ޣ���ͬ���ތ�(du��)��(y��ng)��ͬӋ(j��)�㹫ʽ����(x��)���㷨�������£�
��������(j��)��(bi��o)־���Д���λ�c(di��n)��λ�ã�����(j��)����(y��ng)λ�ò�ͬ��ʽ��ȡ��(x��)��ֵ
����Ȼ�����ù�ʽR=N����+d��L�������һ�c(di��n)�C���ӵķ�ֵ��ݔ����ʽ��N�������ڵ��ۼ�Ӌ(j��)��(sh��)ֵ��W���Ŗž࣬d�鼚(x��)��Ӌ(j��)��(sh��)��L=�أ�m��m�鼚(x��)�ֱ���(sh��)��
����4 �Y(ji��)���Z(y��)
�����O(sh��)Ӌ(j��)�Ĺ�ŵ���z������ֽY(ji��)����FPGA�ď�(qi��ng)����ƹ��ܺ�DSP�����\(y��n)��̎�����ܣ���(sh��)�F(xi��n)����̖(h��o)��ͬ���ɼ����߱���(x��)�ֺ͌�(sh��)�r(sh��)��(f��)�F(xi��n)���p���ˆ�һ̎������ؓ(f��)�ɣ������ϵ�y(t��ng)���ٶȺͷ�(w��n)���ԣ���������(d��ng)��̖(h��o)̎�������һ��(g��)��˼·������Ӳ���p��RAM�ӿڕr(sh��)���(f��)�s���ɱ���Ҳ��(hu��)�oϵ�y(t��ng)����(l��i)����(w��n)���ԣ���˱�����FPGA���O(sh��)Ӌ(j��)��һܛRAM����(du��)�����(d��ng)��̖(h��o)��ֵ��Ӌ(j��)��t���ڌ�(du��)�����ڵ�Ī���l�y�M(j��n)��Ӌ(j��)��(sh��)��ͬ�r(sh��)������ܛ����(x��)�ַ���(sh��)�r(sh��)��Ӌ(j��)����������ڵ�Ī���l�y��̖(h��o)��������С��(sh��)ֵ������(sh��)�r(sh��)��������Ӻ����Ī���l�y��(d��ng)��(ÿ��(g��)Ī���l�y��������λ����)�����ɵõ���̖(h��o)�Č�(sh��)�r(sh��)���(d��ng)��ֵ��