 電子發燒友App
電子發燒友App


永磁直流無刷電機(BLDCM)是一種典型的機電一體化電機,除了有普通直流電機調試性能好、調速范圍寬和調速方式簡單的特點外,還有功率因素高、轉動慣量小、運行效率高等優點,特別是由于它不存在機械換相器與電刷,大大的減少了換相火花,機械磨損和機械噪聲,使得它在中小功率范圍內得到了更加廣泛的應用,是電機的主要發展方向之一。?
對于永磁直流無刷電機的控制方式,可以分為兩大類:有位置傳感器控制方式和無位置傳感器控制方式。典型的有位置傳感器控制方式是使用霍爾傳感器控制方式。無位置傳感器控制方式是目前比較廣泛使用且較為新穎的一類控制方式,包含有:反電動勢控制方法、磁鏈計算法、狀態觀測器法和人工神經網絡(ANN)控制法等。反電動勢控制方法中對驅動橋和電機在外電路過流時的保護極為重要,對軟件發生錯誤動作時負載的保護也提出了較高的要求,本文采用反電動勢控制方法,以直流無刷稀土電機為研究對象,設計了兩個電流保護模塊和一個數字邏輯保護電路,提高了系統工作時的安全性,具有較大的研究意義。

1?控制系統總體設計?
本系統采用PWM反饋控制方式的典型閉環調速系統其中還創新性的加入了邏輯保護電路和兩路電流保護電路,控制系統總體設計框圖如圖1所示。由轉速參考值n0與實際轉速的反饋值n相比較,得到的偏差送到轉速控制器,經過相應的計算后輸出控制信號到PWM控制器,PWM控制器則產生三相橋試逆變器主開關的控制信號,然后由主開關完成對永磁無刷直流電機定子電流的通斷,并產生平均意義上旋轉的定子電樞合成磁勢,由定子電樞合成磁勢帶動永磁體轉子旋轉,實現了永磁無刷直流電機的自同步控制。?
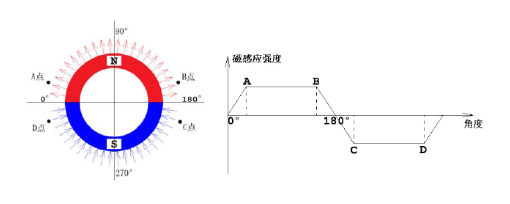
研究對象永磁直流無刷稀土電機將磁體粘貼到轉子鐵心表面,組成所謂的隱極式轉子結構。其定子三相對稱繞組采用整距、集中繞組,無中線引出線,由電機學原理可知反電動勢的波形為一梯形波,而且電機中A、B、C三相是對稱的,它們的反電動勢只在相位上依次落后120度。再考慮到定子每相繞組的反電動勢正比于轉子角速度,有圖2所示關系。?
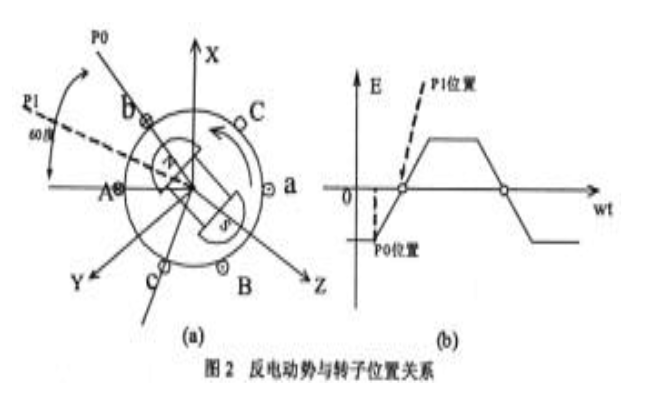
由此得出反電動勢法控制規律的重要結論為:通過測量反電動勢獲取轉子位置信號,并不是測量反電動勢大小,而是反電動勢的過零點信號,當反電動勢出現過零點后再延時30度電度角就是轉子電流下一次換相時刻。但反電動勢無法直接測量得到,可通過測量電機端電壓來間接獲取電機反電動勢。?
2?系統硬件設計?
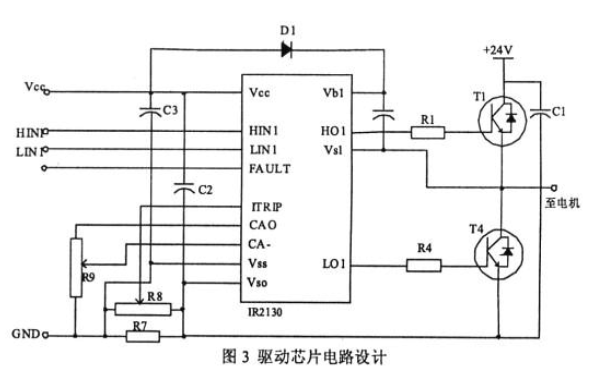
該系統硬件電路設計重難點在于驅動逆變電路,轉子位置檢測電路和電路保護模塊三大部分。驅動逆變電路包含驅動芯片和驅動橋式電路兩個部分,驅動芯片采用IR2130驅動芯片,它是專用的三相橋式電路驅動芯片,可以直接驅動中小容量的MOSFET、IGBT、MCT等,而且只需一個供電電源,工作頻率從幾十赫茲到上百千赫茲,內部還設置有過流和欠壓保護使得在驅動功率管時更加安全可靠。?
驅動橋式電路常用方案有:三相半橋驅動,電容儲能驅動和三相全橋驅動。三相全橋驅動由六只功率管構成三相六臂全控橋,雖然增加了功率開關管的數量,但增大了轉矩輸出且轉矩波動小于三相半橋驅動,復雜性與可靠性上也優于電容儲能驅動,而且起動特性和低速平穩性都較好,因此本系統采用此方案。如圖3所示,為驅動芯片和驅動橋式電路(只接了一相的上下橋臂)的硬件電路設計。?
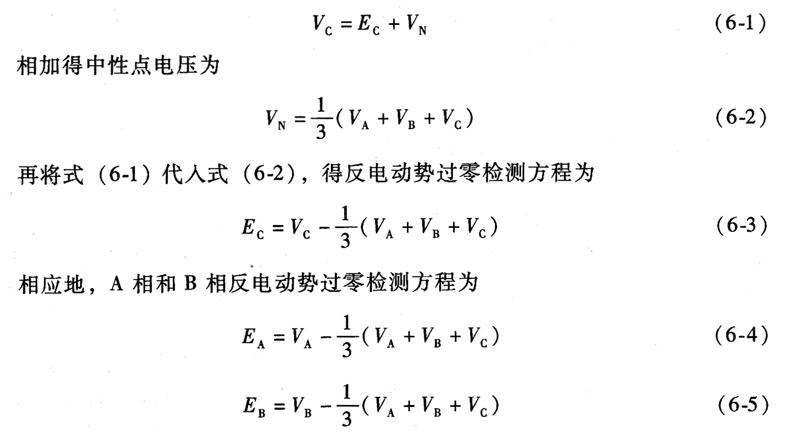
轉子位置檢測電路用于測取電機反電動勢過零點信息,從而獲得轉子位置,而且是通過檢測電機的端電壓來實現的。電路設計如圖4所示。
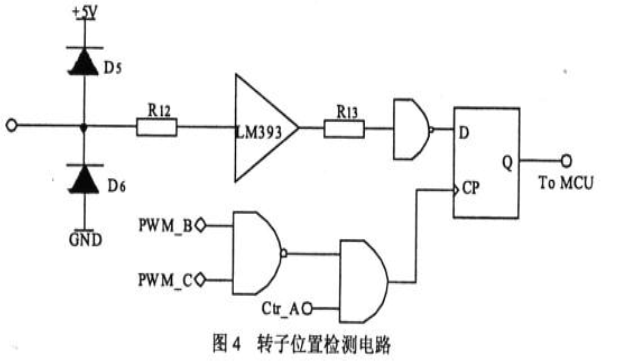
電機端電壓檢測共分為A、B、C三相,現以A相為例,先將輸入到IR2130的B和C相驅動控制信號PWM?B和PWM?C通過與非門反相,得到B、C兩相上橋臂的PWM驅動信號相與的波形,然后跟單片機輸出控制口信號Ctr_A相與。當單片機輸出控制口為l時,D觸發器時鐘端為B、C兩相PWM驅動波形相與的信號;當單片機輸出口為0時,D觸發器時鐘端為低電平,封鎖D觸發器輸出,使D觸發器輸出保持不變,從而通過編寫軟件控制單片機輸出口,使得每個狀態,只有一個D觸發器開通,且在續流階段封鎖D觸發器輸出,這樣可以很大程度的避免反電動勢虛假過零點對零點信息測量的影響。?
電流保護電路包括兩個部分。第一部分如圖3所示。?
通過R7、R8、R9三個電阻將驅動橋的電壓信號采集到IR2130中,一旦外電路發生過流或直通,IR2130內部的電流比較器迅速翻轉,故障處理單元輸出低電平,封鎖驅動輸出口,同時引腳FAULT向MCU發出報警信號,由此完成第一部分電流保護功能且要通過軟件設計實現具體的功能響應。第二部分電流保護主要針對驅動橋,電路設計如圖5所示。
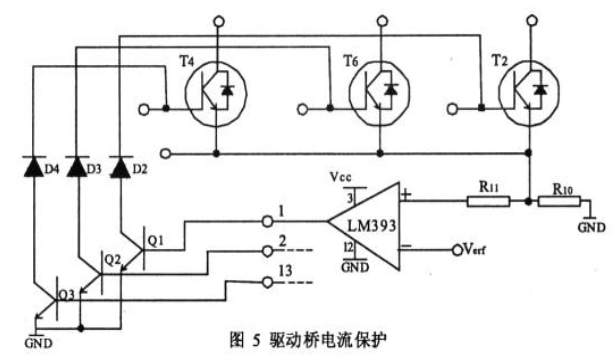
保護電路通過R10于Rll將驅動橋下橋臂的電壓采集到LM393的正向輸入端,可以和事先設定的Verf進行比較,當驅動橋電流過大時,LM393輸出高電平,使得Q1、Q2、Q3都導通,由此降低下橋臂MOS管的柵源電壓,達到保護MOS管的目的。?
三相全橋的驅動控制是由MCU通過PWM方式實現的,當軟件運行出現錯誤時,可能會使得同一橋臂的上下兩個MOS管同時導通,這將造成短路,極易燒壞MOS管,由此設計了邏輯保護電路模塊,使得同一橋臂上下兩個MOS管不會出現同時導通的情況。邏輯保護電路輸入與輸出的邏輯關系如表1所示。?
表1輸入輸出邏輯關系?
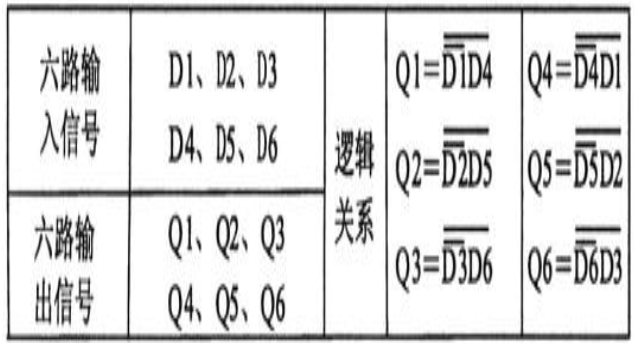
通過表1的邏輯關系,同一橋臂上下橋臂的輸入信號互鎖,使得不會出現同時導通的情況。硬件電路的連接由表l邏輯關系而定,而且可以通過與非門電路搭建而成,在此不再詳述。?
3?系統軟件設計?
MCU輸出控制信號控制三相全橋驅動逆變電路,在軟件實現上可以采用不同的控制規律,常用的控制方式有:三三導通控制方式,兩三輪流導通控制方式和1200導通型控制方式。它們在控制性能上相差不大,本系統采用1200導通型控制方式,控制規律為:(1)每隔600換流一次;(2)任何時候只有兩只開關器件同時導通;(3)每個開關器件導通1200根據硬件電路的設計和1200導通型控制規律,橋臂與MOS管對應關系為:A上橋臂:Tl,A下橋臂:T4;B上橋臂:T3,B下橋臂:T6;C上橋臂:T5,C下橋臂:T2。各MOS管導通順序如表2所示。?
表2MOS管導通規律
采用反電動勢法控制直流無刷稀土電機,在起動時,由于電機轉速很小,無法獲得反電動勢,因此電機起動順利完成要通過軟件編程實現。常用的起動方式有:外同步驅動起動方式和預定位起動方式。外同步驅動方式指以變頻方式同步拖動電機轉子旋轉,這種起動方式的缺點是轉子的旋轉方向是不可知的,轉子可能順時針旋轉也可能逆時針旋轉;另外,如果頻率上升太快,電機很容易失步。預定位方式起動是在起動開始時給電機一個確定的通電狀態,使轉子定位。然后改變電機的通電狀態,在電磁力矩的作用下使轉子向確定方向轉動,在轉動過程中把電機切換到無刷電機運行方式。這樣,一方面使繞組中具有一定大小的反電勢信號,另一方面電動勢的相序是固定的而非隨機的,保證電機有一個確定的轉向,實現電機的順利起動。?
4?總結?
采用以上分析設計的控制方案控制直流無刷稀土電機,實現了反電動勢法無傳感器控制方式。同時采用兩個電流保護模塊,一個從硬件上實現保護,一個從軟件方面設計實現保護,使得電機在外電路過流與直通發生時能更好的保護整個控制系統的安全運行,相比較于只采用硬件保護電路或軟件保護的反電動勢控制方法更加靈活安全。還特別的加入了邏輯保護電路模塊使得在軟件出現問題時能保護驅動電路和電機的安全。整個系統在分析設計方面還有改進的空間,希望其他讀者能從以下方面進行改進。?
(1)更好的解決反電動勢虛假過零點問題。?????
(2)有待研究更快更好的啟動方法。











 工商網監
工商網監
評論