 電子發(fā)燒友App
電子發(fā)燒友App


伺服電機(jī)(servo motor )又稱(chēng)執(zhí)行電機(jī),是指在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī),是一種補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號(hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動(dòng)控制對(duì)象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號(hào)控制,并能快速反應(yīng),在自動(dòng)控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時(shí)間常數(shù)小、線(xiàn)性度高、始動(dòng)電壓等特性,可把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。分為直流和交流伺服電動(dòng)機(jī)兩大類(lèi),其主要特點(diǎn)是,當(dāng)信號(hào)電壓為零時(shí)無(wú)自轉(zhuǎn)現(xiàn)象,轉(zhuǎn)速隨著轉(zhuǎn)矩的增加而勻速下降。
伺服電機(jī)——基本構(gòu)造
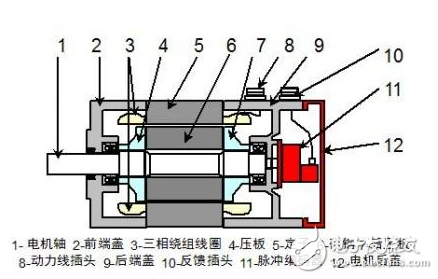
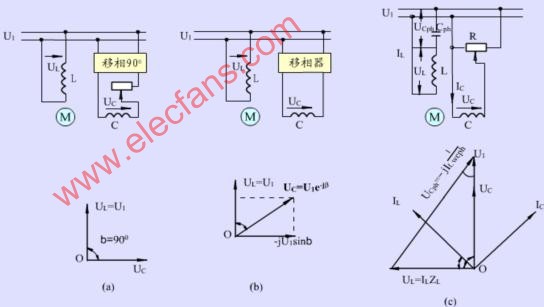
交流伺服電機(jī)也是由定子和轉(zhuǎn)子構(gòu)成。它的定子的構(gòu)造基本上與電容分相式單相異步電動(dòng)機(jī)相似,其定子上裝有兩個(gè)位置互差90°的繞組,一個(gè)是勵(lì)磁繞組Rf,它始終接在交流電壓Uf上;另一個(gè)是控制繞組L,聯(lián)接控制信號(hào)電壓Uc。所以交流伺服電動(dòng)機(jī)又稱(chēng)兩個(gè)伺服電動(dòng)機(jī)。
交流伺服電動(dòng)機(jī)的轉(zhuǎn)子通常做成鼠籠式,但為了使伺服電動(dòng)機(jī)具有較寬的調(diào)速范圍、線(xiàn)性的機(jī)械特性,無(wú)“自轉(zhuǎn)”現(xiàn)象和快速響應(yīng)的性能,它與普通電動(dòng)機(jī)相比,應(yīng)具有轉(zhuǎn)子電阻大和轉(zhuǎn)動(dòng)慣量小這兩個(gè)特點(diǎn)。
最早的伺服電動(dòng)機(jī)是一般的直流電動(dòng)機(jī),在控制精度不高的情況下,才采用一般的直流電機(jī)做伺服電動(dòng)機(jī)。目前的直流伺服電動(dòng)機(jī)從結(jié)構(gòu)上講,就是小功率的直流電動(dòng)機(jī),其勵(lì)磁多采用電樞控制和磁場(chǎng)控制,但通常采用電樞控制。
伺服電機(jī)——工作原理
1、伺服系統(tǒng)(servo mechanism)是使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動(dòng)控制系統(tǒng)。伺服主要靠脈沖來(lái)定位,基本上可以這樣理解,伺服電機(jī)接收到1個(gè)脈沖,就會(huì)旋轉(zhuǎn)1個(gè)脈沖對(duì)應(yīng)的角度,從而實(shí)現(xiàn)位移,因?yàn)椋欧姍C(jī)本身具備發(fā)出脈沖的功能,所以伺服電機(jī)每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量的脈沖,這樣,和伺服電機(jī)接受的脈沖形成了呼應(yīng),或者叫閉環(huán),如此一來(lái),系統(tǒng)就會(huì)知道發(fā)了多少脈沖給伺服電機(jī),同時(shí)又收了多少脈沖回來(lái),這樣,就能夠很精確的控制電機(jī)的轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)精確的定位,可以達(dá)到0.001mm。
2、交流伺服電動(dòng)機(jī)的工作原理
交流伺服電動(dòng)機(jī)在沒(méi)有控制電壓時(shí),定子內(nèi)只有勵(lì)磁繞組產(chǎn)生的脈動(dòng)磁場(chǎng),轉(zhuǎn)子靜止不動(dòng)。當(dāng)有控制電壓時(shí),定子內(nèi)便產(chǎn)生一個(gè)旋轉(zhuǎn)磁場(chǎng),轉(zhuǎn)子沿旋轉(zhuǎn)磁場(chǎng)的方向旋轉(zhuǎn),在負(fù)載恒定的情況下,電動(dòng)機(jī)的轉(zhuǎn)速隨控制電壓的大小而變化,當(dāng)控制電壓的相位相反時(shí),伺服電動(dòng)機(jī)將反轉(zhuǎn)。
3、直流伺服電動(dòng)機(jī)的工作原理
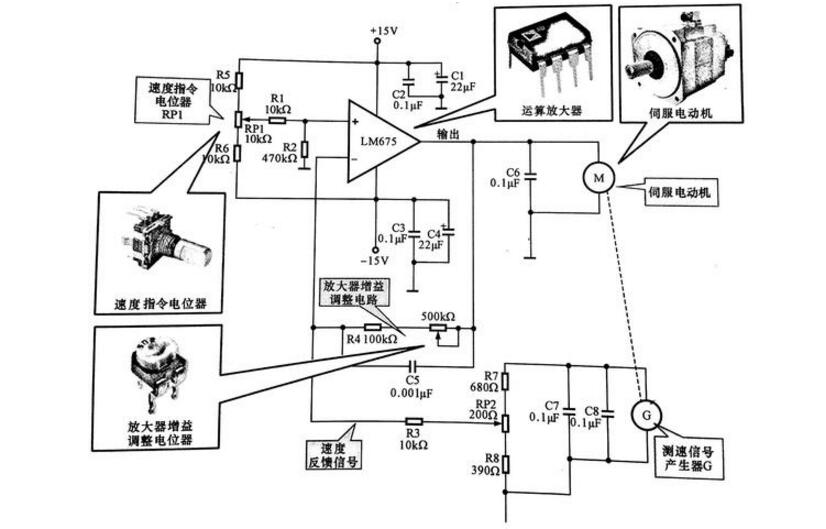
直流伺服電機(jī)的工作原理與普通的直流電機(jī)工作原理基本相同。依靠電樞氣流與氣隙磁通的作用產(chǎn)生電磁轉(zhuǎn)矩,使伺服電機(jī)轉(zhuǎn)動(dòng)。通常采用電樞控制方式,在保持勵(lì)磁電壓不變的條件下,通過(guò)改變電壓來(lái)改變轉(zhuǎn)速。電壓越小轉(zhuǎn)速越低,電壓為零時(shí),停止轉(zhuǎn)動(dòng)。因?yàn)殡妷簽榱銜r(shí),電流也為零,所以電機(jī)不會(huì)產(chǎn)生電磁轉(zhuǎn)矩,既不會(huì)出現(xiàn)自轉(zhuǎn)現(xiàn)象。
伺服電機(jī)——調(diào)試方法
1、初始化參數(shù)在接線(xiàn)之前,先初始化參數(shù)。
在控制卡上:選好控制方式;將PID參數(shù)清零;讓控制卡上電時(shí)默認(rèn)使能信號(hào)關(guān)閉;將此狀態(tài)保存,確保控制卡再次上電時(shí)即為此狀態(tài)。
在伺服電機(jī)上:設(shè)置控制方式;設(shè)置使能由外部控制;編碼器信號(hào)輸出的齒輪比;設(shè)置控制信號(hào)與電機(jī)轉(zhuǎn)速的比例關(guān)系。一般來(lái)說(shuō),建議使伺服工作中的最大設(shè)計(jì)轉(zhuǎn)速對(duì)應(yīng)9V的控制電壓。比如,山洋是設(shè)置1V電壓對(duì)應(yīng)的轉(zhuǎn)速,出廠值為500,如果你只準(zhǔn)備讓電機(jī)在1000轉(zhuǎn)以下工作,那么,將這個(gè)參數(shù)設(shè)置為111。
2、接線(xiàn)將控制卡斷電,連接控制卡與伺服之間的信號(hào)線(xiàn)。以下的線(xiàn)是必須要接的:控制卡的模擬量輸出線(xiàn)、使能信號(hào)線(xiàn)、伺服輸出的編碼器信號(hào)線(xiàn)。復(fù)查接線(xiàn)沒(méi)有錯(cuò)誤后,電機(jī)和控制卡(以及PC)上電。此時(shí)電機(jī)應(yīng)該不動(dòng),而且可以用外力輕松轉(zhuǎn)動(dòng),如果不是這樣,檢查使能信號(hào)的設(shè)置與接線(xiàn)。用外力轉(zhuǎn)動(dòng)電機(jī),檢查控制卡是否可以正確檢測(cè)到電機(jī)位置的變化,否則檢查編碼器信號(hào)的接線(xiàn)和設(shè)置。
3、試方向?qū)τ谝粋€(gè)閉環(huán)控制系統(tǒng),如果反饋信號(hào)的方向不正確,后果肯定是災(zāi)難性的。通過(guò)控制卡打開(kāi)伺服的使能信號(hào)。這是伺服應(yīng)該以一個(gè)較低的速度轉(zhuǎn)動(dòng),這就是傳說(shuō)中的“零漂”。一般控制卡上都會(huì)有抑制零漂的指令或參數(shù)。使用這個(gè)指令或參數(shù),看電機(jī)的轉(zhuǎn)速和方向是否可以通過(guò)這個(gè)指令(參數(shù))控制。如果不能控制,檢查模擬量接線(xiàn)及控制方式的參數(shù)設(shè)置。確認(rèn)給出正數(shù),電機(jī)正轉(zhuǎn),編碼器計(jì)數(shù)增加;給出負(fù)數(shù),電機(jī)反轉(zhuǎn)轉(zhuǎn),編碼器計(jì)數(shù)減小。如果電機(jī)帶有負(fù)載,行程有限,不要采用這種方式。測(cè)試不要給過(guò)大的電壓,建議在1V以下。如果方向不一致,可以修改控制卡或電機(jī)上的參數(shù),使其一致。
4、抑制零漂在閉環(huán)控制過(guò)程中,零漂的存在會(huì)對(duì)控制效果有一定的影響,最好將其抑制住。使用控制卡或伺服上抑制零飄的參數(shù),仔細(xì)調(diào)整,使電機(jī)的轉(zhuǎn)速趨近于零。由于零漂本身也有一定的隨機(jī)性,所以,不必要求電機(jī)轉(zhuǎn)速絕對(duì)為零。
5、建立閉環(huán)控制再次通過(guò)控制卡將伺服使能信號(hào)放開(kāi),在控制卡上輸入一個(gè)較小的比例增益,至于多大算較小,這只能憑感覺(jué)了,如果實(shí)在不放心,就輸入控制卡能允許的最小值。將控制卡和伺服的使能信號(hào)打開(kāi)。這時(shí),電機(jī)應(yīng)該已經(jīng)能夠按照運(yùn)動(dòng)指令大致做出動(dòng)作了。
6、調(diào)整閉環(huán)參數(shù)細(xì)調(diào)控制參數(shù),確保電機(jī)按照控制卡的指令運(yùn)動(dòng),這是必須要做的工作,而這部分工作,更多的是經(jīng)驗(yàn),這里只能從略了。
伺服電機(jī)——注意事項(xiàng)
1、伺服電機(jī)油和水的保護(hù)
① 伺服電機(jī)可以用在會(huì)受水或油滴侵襲的場(chǎng)所,但是它不是全防水或防油的。因此, 伺服電機(jī)不應(yīng)當(dāng)放置或使用在水中或油侵的環(huán)境中。
② 如果伺服電機(jī)連接到一個(gè)減速齒輪,使用伺服電機(jī)時(shí)應(yīng)當(dāng)加油封,以防止減速齒輪的油進(jìn)入伺服電機(jī)
③ 伺服電機(jī)的電纜不要浸沒(méi)在油或水中。
2、伺服電機(jī)電纜→減輕應(yīng)力
① 確保電纜不因外部彎曲力或自身重量而受到力矩或垂直負(fù)荷,尤其是在電纜出口處或連接處。
② 在伺服電機(jī)移動(dòng)的情況下,應(yīng)把電纜(就是隨電機(jī)配置的那根)牢固地固定到一個(gè)靜止的部分(相對(duì)電機(jī)),并且應(yīng)當(dāng)用一個(gè)裝在電纜支座里的附加電纜來(lái)延長(zhǎng)它,這樣彎曲應(yīng)力可以減到最小。
③ 電纜的彎頭半徑做到盡可能大。
3、伺服電機(jī)允許的軸端負(fù)載
① 確保在安裝和運(yùn)轉(zhuǎn)時(shí)加到伺服電機(jī)軸上的徑向和軸向負(fù)載控制在每種型號(hào)的規(guī)定值以?xún)?nèi)。
② 在安裝一個(gè)剛性聯(lián)軸器時(shí)要格外小心,特別是過(guò)度的彎曲負(fù)載可能導(dǎo)致軸端和軸承的損壞或磨損
③ 最好用柔性聯(lián)軸器,以便使徑向負(fù)載低于允許值,此物是專(zhuān)為高機(jī)械強(qiáng)度的伺服電機(jī)設(shè)計(jì)的。
④ 關(guān)于允許軸負(fù)載,請(qǐng)參閱“允許的軸負(fù)荷表”(使用說(shuō)明書(shū))。
4、伺服電機(jī)安裝注意
① 在安裝/拆卸耦合部件到伺服電機(jī)軸端時(shí),不要用錘子直接敲打軸端。(錘子直接敲打軸端,伺服電機(jī)軸另一端的編碼器要被敲壞)
② 竭力使軸端對(duì)齊到最佳狀態(tài)(對(duì)不好可能導(dǎo)致振動(dòng)或軸承損壞)。
伺服電機(jī)——特點(diǎn)
伺服電動(dòng)機(jī)與單機(jī)異步電動(dòng)機(jī)相比,有三個(gè)顯著特點(diǎn):
1、無(wú)自轉(zhuǎn)現(xiàn)象
正常運(yùn)轉(zhuǎn)的伺服電動(dòng)機(jī),只要失去控制電壓,電機(jī)立即停止運(yùn)轉(zhuǎn)。當(dāng)伺服電動(dòng)機(jī)失去控制電壓后,它處于單相運(yùn)行狀態(tài),由于轉(zhuǎn)子電阻大,定子中兩個(gè)相反方向旋轉(zhuǎn)的旋轉(zhuǎn)磁場(chǎng)與轉(zhuǎn)子作用所產(chǎn)生的兩個(gè)轉(zhuǎn)矩特性(T1-S1、T2-S2曲線(xiàn))以及合成轉(zhuǎn)矩特性(T-S曲線(xiàn))
伺服電機(jī)的輸出功率一般是0.1-100W。當(dāng)電源頻率為50Hz,電壓有36V、110V、220、380V;當(dāng)電源頻率為400Hz,電壓有20V、26V、36V、115V等多種。推薦閱讀; 電機(jī)生產(chǎn)廠家
2、運(yùn)行范圍較廣
3、起動(dòng)轉(zhuǎn)矩大
由于轉(zhuǎn)子電阻大,其轉(zhuǎn)矩特性曲線(xiàn)如圖3中曲線(xiàn)1所示,與普通異步電動(dòng)機(jī)的轉(zhuǎn)矩特性曲線(xiàn)2相比,有明顯的區(qū)別。它可使臨界轉(zhuǎn)差率S0>1,這樣不僅使轉(zhuǎn)矩特性(機(jī)械特性)更接近于線(xiàn)性,而且具有較大的起動(dòng)轉(zhuǎn)矩。因此,當(dāng)定子一有控制電壓,轉(zhuǎn)子立即轉(zhuǎn)動(dòng),即具有起動(dòng)快、靈敏度高的特點(diǎn)。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論