半導體激光器驅動電路設計(兩款半導體電路設計)
一。半導體激光器驅動器輸出電路的設計
隨著科學技術的飛速發(fā)展,半導體激光器技術已深入到國民經(jīng)濟和國防建設的各個領域。半導體激光器具有其它激光器無法比擬的特性,比如:常見的激光器如He-Ne激光器,采用高壓激發(fā)(約1500V),而半導體激光器采用3~5V的低電壓激發(fā),相比之下,半導體激光器的激勵方式較為安全,并且效率比普通激光器高數(shù)十倍;在一些測量儀器中,選用半導體激光器照明,能滿足單色性好,相干性好,光束準直,精度高等要求,在遠距離通訊、激光雷達、數(shù)字信號的存儲和恢復、激光測距、機器人、全息應用、醫(yī)學診斷等方面都有廣泛的應用。但半導體激光器對工作條件要求苛刻,在不適當?shù)墓ぷ骰虼娣艞l件下,會造成性能的急劇惡化乃至失效。所以,使激光器正常工作的激光器驅動電源就顯得尤為重要。因而在實際應用中對激光器驅動器的性能有著很高的要求。
半導體激光器(LD)具有體積小、重量輕、轉換效率高、工作壽命長等優(yōu)點,在工業(yè)、軍事、醫(yī)療等領域得到了廣泛應用。LD是以電流注入作為激勵方式的一種激光器,其使用壽命、工作特性在很大程度上取決于所用驅動電源的性能好壞。
半導體激光器本身的性質決定其抗浪涌沖擊能力差,這就要求驅動電源的穩(wěn)定度高,浪涌沖擊小,因此驅動電源中需要各種保護電路以滿足實際要求。通常用慢啟動電路、TVS(瞬態(tài)抑制器)吸收電路、限流電路等來防止浪涌沖擊及電流過大。但大功率半導體激光器的工作電流較大,并且半導體激光器比較脆弱,傳統(tǒng)的慢啟動電路、TVS吸收電路不能很好地滿足實際要求。
1 半導體激光器驅動器的理論分析
半導體激光器的應用廣泛,因而其相應的驅動技術也顯得越來越重要。半導體激光器的驅動技術通常采用恒電流驅動方式,在此工作方式中,通過電學反饋控制回路,直接提供驅動電流電平的有效控制,由此獲得最低的電流偏差和最高LD(Laser Diode)輸出的穩(wěn)定性。整體的設計思想是運用負反饋原理穩(wěn)定輸出電流,由此獲得最低的電流偏差和最高的電流輸出穩(wěn)定性。驅動器的框圖如圖1所示:
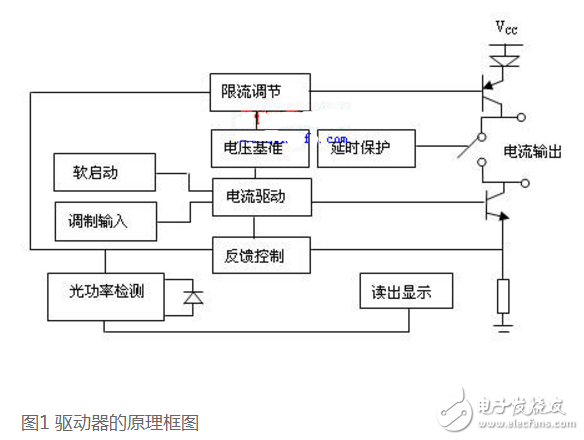
該驅動器由電壓基準電路,末級電路(電流驅動),顯示電路,調(diào)制輸入電路,保護電路等部分組成。驅動器工作在恒流的工作方式時,首先由電壓基準產(chǎn)生一個精度及穩(wěn)定度`比較高的基準電壓,然后由電位器對基準電壓進行取樣,并將取樣值送入電壓-電流轉換器,由此獲得受取樣電壓控制的輸出電流。由于該輸出電流不穩(wěn)定,因此我們需要從電流放大器的輸出電流中進行電壓取樣,并將其送回電壓-電流轉換器與基準電壓共同控制運放,從而形成一個深度負反饋的閉環(huán)系統(tǒng),使得輸出電流保持在設定值上恒定不變[2]。
本文闡述的驅動器采用恒電流驅動,該驅動方式是一種常見的半導體激光器工作方式,當半導體激光器工作在恒電流狀態(tài)時,對驅動器最主要的要求是輸出電流的穩(wěn)定性,這也是驅動器設計需要解決的主要問題。
2負反饋穩(wěn)定輸出電流的原理
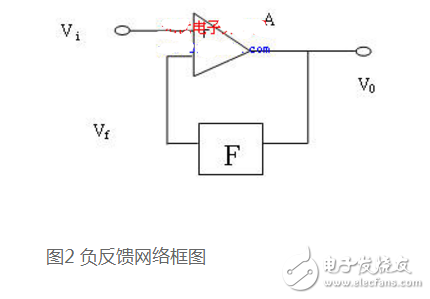
所謂反饋是把電子線路的輸出量的全部或一部分,從輸出端通過一定的路徑(反饋網(wǎng)絡)回送到輸入端的過程。如果引入的反饋信號與輸入信號極性相反,削弱了輸入信號的作用,使放大電路的放大倍數(shù)降低,則稱為負反饋。在各種放大電路中,利用負反饋的方法來改善各項性能,使電路輸出量(電壓或電流)的變化反饋到輸入端,從而控制輸出端的變化,起到自動調(diào)節(jié)的作用。負反饋放大電路主要由基本放大電路及反饋網(wǎng)絡組成,如圖2所示: 在放大電路的輸出端有取樣網(wǎng)絡,對輸出信號V0取樣,放大電路輸入端有相加網(wǎng)絡,用于輸入信號 與反饋信號 的比較,將比較結果作為基本放大電路的輸入信號。
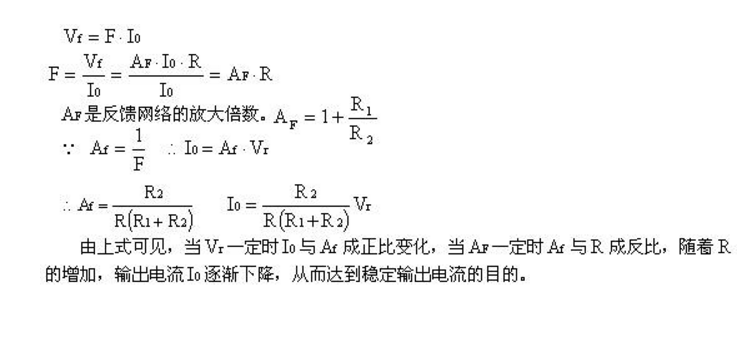
是無反饋時反饋放大電路的放大倍數(shù);F是反饋系數(shù);Vf和V0分別是反饋網(wǎng)絡的輸出和輸入。由于F=Vf/V0是反饋系數(shù),因此設Af是加入反饋網(wǎng)絡后的放大倍數(shù);
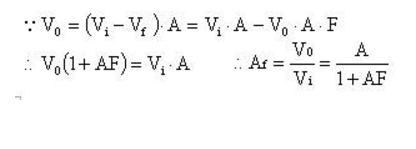
由上式可見,引入負反饋后,放大倍數(shù)改變了,放大倍數(shù)Af的大小與(|1+AF|)有關。若(|1+AF|),即引入反饋后,放大倍數(shù)減小了,這種反饋一般稱為負反饋。引入負反饋后,當輸入信號一定時,負反饋能使輸出保持恒定,就是能維持放大倍數(shù)恒定。從數(shù)學表達式來看,當反饋很深,(|1+AF|)可簡化為Af≈1/F這就是說,引入負反饋后,放大器的放大倍數(shù)只決定于反饋網(wǎng)絡,而與放大器幾乎無關。由于反饋網(wǎng)絡一般都由參數(shù)比較穩(wěn)定的無源元件構成,其傳輸系數(shù) 十分穩(wěn)定。只要反饋放大器的環(huán)路傳輸 足夠大,放大器的閉環(huán)增益可基本不受影響。
3電流控制原理
由于半導體激光器驅動器輸出電流在幾十毫安至幾安之間,因此本文選定輸出電流為 作為驅動器的輸出電流。由上述分析可知:如果把將負反饋原理應用到驅動器的設計中,可以獲得合適的輸出電流,該驅動器的末級電路(電流驅動)設計如圖3所示。
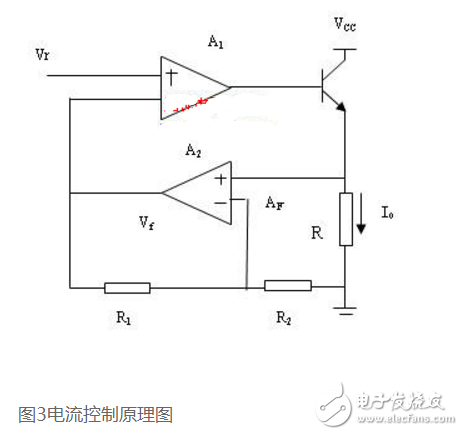
準電壓Vr送入運放A1的同相端,該運放控制放大器的導通程度,并由此獲得相應的輸出電流,輸出電流在取樣電阻上產(chǎn)生取樣電壓,該取樣電壓經(jīng)放大后作為反饋電壓反饋回電壓放大器A1的反相輸入端,并與同相輸入端的電壓(即由基準電壓產(chǎn)生并經(jīng)過前級放大后的電壓)比較,對輸出電壓進行調(diào)整,進而對放大器的輸出電流進行調(diào)整,使整個閉環(huán)反饋系統(tǒng)處于動態(tài)的平衡中,以達到穩(wěn)定輸出電流的目的。
我們也可以通過公式推倒,可以找出輸出電流I0和控制電壓Vt的關系。
4 仿真結果分析
本文借助于Protel99SE軟件進行仿真分析,來驗證電路設計的準確性。該軟件是以PSPICE為核心,對電子電路不僅能進行直流、交流和瞬態(tài)等基本的電路特性分析,還可以進行參數(shù)掃描、靈敏度、蒙特卡諾統(tǒng)計、最壞情況和優(yōu)化分析,并可以將各種仿真分析的結果以波形或圖表的方式直觀地顯示出來,因此它在電子電路的設計中得到了廣泛的應用[1]
瞬態(tài)特性分析
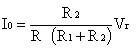
為了檢測輸出電流在一定時間范圍內(nèi)是否恒定為250 ,因此有必要對電路進行瞬態(tài)特性分析。給輸入端的基準電壓提供一個階躍信號。該信號如圖4所示:階躍信號高電平電壓為5V,脈沖寬度為30s,時間變化范圍為0-50s。觀測R上的電流是否是穩(wěn)定輸出電流。從電路原理分析可知,
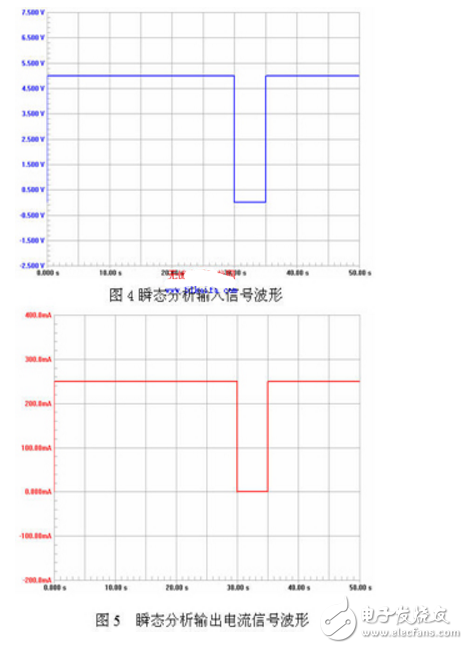
根據(jù)電路原理選定![]() 根據(jù)所設置的參數(shù)若輸入基準電壓 為5V,經(jīng)過計算可知輸出電流 約為250 。結果如圖5所示,經(jīng)過仿真分析驗證了無論時間如何變化,當輸入的基準電壓為5V,輸出電流始終保持250 。
根據(jù)所設置的參數(shù)若輸入基準電壓 為5V,經(jīng)過計算可知輸出電流 約為250 。結果如圖5所示,經(jīng)過仿真分析驗證了無論時間如何變化,當輸入的基準電壓為5V,輸出電流始終保持250 。
直流掃描分析
因為恒電流驅動電路的輸出電流和基準電壓的關系為:
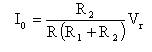
由公式可見,當電阻參數(shù)不變時,I0隨Vr的增加而增加I0與Vr呈線性變化。可以利用直流掃描分析來檢驗這種輸出與輸入的關系。因此選擇Vr作為掃描對象,觀察輸出電流隨基準電壓的變化規(guī)律。仿真結果如圖6所示:
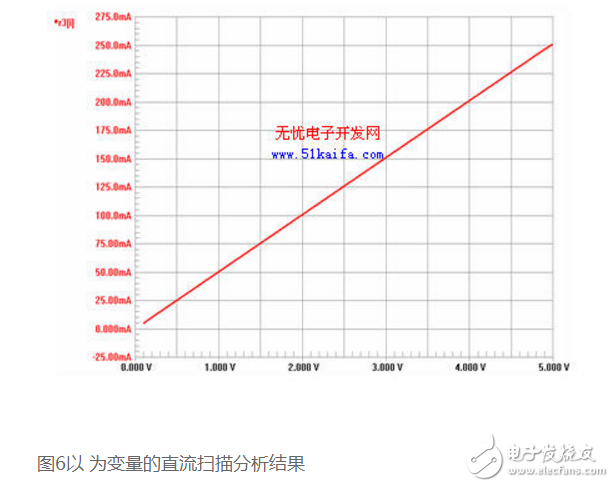
圖6中的曲線反映了基準電壓和輸出電流的關系。從曲線上可以看出,Vr在0-5V范圍內(nèi)I0隨著Vr的增加而增加。如果要改變輸出電流的大小可以在其他參數(shù)不變的情況下通過改變基準電壓來改變輸出電流。例如:輸出電流為200mA ,則輸入電壓等于4V時。所以根據(jù)仿真實驗結果可知,可以由輸出電流來確定基準電壓的大小。
- 第 1 頁:半導體激光器驅動電路設計(兩款半導體電路設計)
- 第 2 頁:調(diào)制型半導體激光器驅動電路設計
本文導航
非常好我支持^.^
(52) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 金川蘭新電子半導體封裝新材料生產(chǎn)線項目主體封頂 2023-10-24
- [電子說] 使用半大馬士革工藝流程研究后段器件集成的工藝 2023-10-24
- [電子說] ESD介紹及TVS的原理和應用 2023-10-24
- [電子說] 怎樣延長半導體元器件的壽命呢? 2023-10-24
- [電子說] 瑞能半導體:碳化硅助力加速新能源汽車行業(yè)發(fā)展 2023-10-24
- [電子說] 氮化鎵充電器如何變得更快更強 2023-10-24
- [應用電子電路] 電池產(chǎn)品電機驅動電路設計 2023-10-24
- [制造/封裝] 晶圓鍵合的種類和應用 2023-10-24
( 發(fā)表人:李倩 )