地鐵ATO系統(tǒng)解析,自動(dòng)駕駛?
“什么?地鐵進(jìn)站后是自動(dòng)停車的?”
“還可以自動(dòng)打開車門?”
在過去,或者當(dāng)前的一些陳舊的既有地鐵線路中,地鐵列車多為司機(jī)人工駕駛。隨著地鐵信號(hào)系統(tǒng)的發(fā)展,地鐵列車的控制系統(tǒng)也變得越來越智能,很早,地鐵就已經(jīng)可以像飛機(jī)一樣,實(shí)現(xiàn)自動(dòng)駕駛了。地鐵可以行駛在隧道中,不需要司機(jī)的控制,就像我們知道的定速巡航中的小汽車一樣。
有了自動(dòng)駕駛系統(tǒng),對(duì)地鐵司機(jī)來說——地鐵不是你想開,想開就能開。
那么,什么是地鐵自動(dòng)駕駛系統(tǒng)?
地鐵自動(dòng)駕駛系統(tǒng),又叫做ATO,而ATO這個(gè)稱謂可能早已被廣大信號(hào)人叫到爛。
ATO(英文稱Automatic Train Operation)叫列車自動(dòng)運(yùn)行裝置,現(xiàn)在多稱作列車自動(dòng)駕駛系統(tǒng)。ATO的主要功能為:可以實(shí)現(xiàn)列車的加速、巡航、減速、精確停車以及停車后自動(dòng)開啟車門和站臺(tái)安全門。
那么,地鐵列車實(shí)現(xiàn)自動(dòng)精確停車、開關(guān)車門和屏蔽門都是ATO的功勞了?
這么說,只說對(duì)了一半。
ATO作為地鐵列車車載設(shè)備,只是命令的執(zhí)行者,而這些命令的計(jì)算卻要依靠一些地鐵系統(tǒng)中的其他設(shè)備。
今天,就一起來聊聊列車自動(dòng)精確停車的其他設(shè)備。
試想,地鐵列車在隧道中運(yùn)行,是如何知道:哪里是站臺(tái),哪里是該停車的位置呢,哪里該加速,哪里該減速呢?
解決這些問題,可能還需要引入另外一個(gè)設(shè)備。
都有過這樣的體會(huì):開著小汽車在高速路上行駛,雖然不認(rèn)路,但是基本上毫無壓力,原因很簡單,我們有導(dǎo)航,而導(dǎo)航對(duì)于我們來說就是地圖,有了地圖,就不會(huì)迷路,即便是驅(qū)車駕駛在陌生的高速路上,也可以知道哪里有出口,哪里有服務(wù)區(qū)、哪里有電子狗。所以,導(dǎo)航是高速路上的開車必備。
地鐵也是一樣,地鐵在黑暗的隧道中行駛,同樣裝備一個(gè)類似導(dǎo)航的東西,叫做電子地圖。
電子地圖和不像我們在汽車導(dǎo)航里面見到的地圖,是一個(gè)三維或者二維的地圖,可以直觀的顯示出來,提供給司機(jī)查看。地鐵系統(tǒng)的電子地圖可以說是一個(gè)一維的地圖,把地鐵的線路畫成一條線,在這條線上,把線路中的所有信號(hào)設(shè)備標(biāo)注出來;與汽車導(dǎo)航不同的是,這個(gè)地圖不需要司機(jī)去看,而是需要列車車載設(shè)備在運(yùn)行的過程中不斷地讀取。
而電子地圖的終極形式就是一堆機(jī)器數(shù)據(jù),向刷手機(jī)ROM一樣刷寫在列車車載設(shè)備ATP中。 列車在運(yùn)行的過程中,不斷讀取電子地圖中的數(shù)據(jù),從而獲取線路中的信息,“實(shí)現(xiàn)導(dǎo)航”。
相比于汽車的導(dǎo)航,電子地圖里沒有加油站、服務(wù)區(qū)、十字路口,取而代之的是:站臺(tái)、區(qū)間、信號(hào)機(jī)、道岔信息、應(yīng)答器信息等。
地鐵列車的電子地圖中描繪了整個(gè)地鐵線路的所有信息。在這條線路上,設(shè)計(jì)了很多個(gè)坐標(biāo),列車通過這些坐標(biāo)知道自己的當(dāng)前位置,同時(shí)也可以通過這些坐標(biāo)實(shí)現(xiàn)一些重要的功能。
圖一中,紅色三角表示電子地圖中的坐標(biāo),叫做信標(biāo),又叫做應(yīng)答器。沒有初始位置的列車行駛經(jīng)過應(yīng)答器之后,可以實(shí)現(xiàn)定位,獲取自己在一條地鐵線路中的具體位置;而運(yùn)行中的列車通過不斷經(jīng)過多個(gè)應(yīng)答器而持續(xù)地實(shí)現(xiàn)位置校正,減少行駛過程中產(chǎn)生的累計(jì)誤差,提高列車的測速測距精度,從而計(jì)算出自己在線路中的精確位置。
應(yīng)答器的顏色一般都是黃色,圖二就是應(yīng)答器在站臺(tái)的布置。
這樣的應(yīng)答器一般在站里會(huì)布置3-4個(gè),用于列車的自動(dòng)精確停車,好奇的同學(xué),下次乘坐地鐵的時(shí)候,可以到車站里面看一看。
列車進(jìn)入站臺(tái)后,經(jīng)過第一個(gè)應(yīng)答器的時(shí)候,開始第一次校正,列車計(jì)算自己的位置和當(dāng)前速度,同時(shí)計(jì)算出列車應(yīng)該輸出的牽引力和制動(dòng)力,通過ATO輸出給列車,使列車在進(jìn)站過程中不斷調(diào)整速度。
經(jīng)過第二個(gè)的時(shí)候,列車距離停車點(diǎn)又近了一步,列車?yán)^續(xù)計(jì)算牽引和制動(dòng)力,調(diào)整速度。
同樣的,列車經(jīng)過第三個(gè)、第四個(gè)應(yīng)答器……
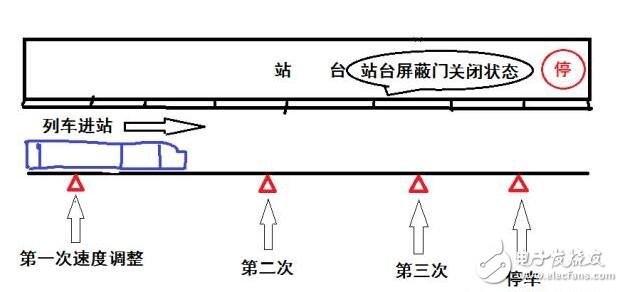
一般來說,列車再經(jīng)過3到4次速度調(diào)整之后,最終可以計(jì)算出一個(gè)可靠的制動(dòng)力,保證列車正好停在的停車點(diǎn)的位置。從而實(shí)現(xiàn)精確自動(dòng)停車。

一般來說,地鐵列車精確自動(dòng)停車的精度在50cm左右,超過50之后,則視為未精確停車,這個(gè)時(shí)候就需要司機(jī)手動(dòng)“給點(diǎn)兒油門兒”或者“掛點(diǎn)倒擋”手動(dòng)把停車位置找準(zhǔn)。
停在停車點(diǎn)位置的列車,即為滿足停車精度的列車,這種情況下,列車的車門與站臺(tái)的屏蔽門是對(duì)齊的。
在列車精確自動(dòng)停車之后,ATO先會(huì)輸出一個(gè)制動(dòng)力,保證列車不會(huì)溜車,先要保證安全嘛;同時(shí)ATO自動(dòng)開啟站臺(tái)側(cè)的車門,并發(fā)送命令給站臺(tái)屏蔽門,使站臺(tái)屏蔽門打開,讓乘客上車。乘客上車后,列車自動(dòng)關(guān)閉車門,列車的站臺(tái)作業(yè)完成,發(fā)車、駛向下一站。
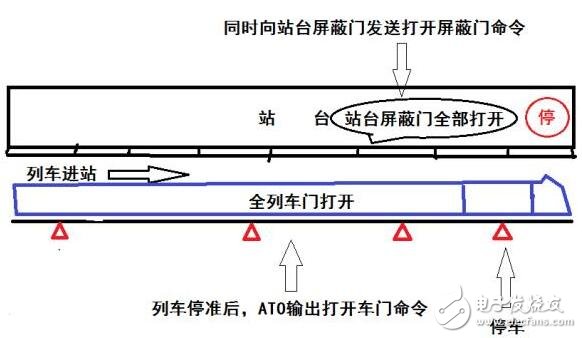
信息過程大概如圖所示,列車停車后打開車門和屏蔽門。
非常好我支持^.^
(255) 91.1%
不好我反對(duì)
(25) 8.9%
相關(guān)閱讀:
( 發(fā)表人:steve )