機(jī)械式前輪主動轉(zhuǎn)向系統(tǒng)的原理和應(yīng)用知識
機(jī)械式前輪主動轉(zhuǎn)向系統(tǒng)的原理和應(yīng)用知識
一、前言
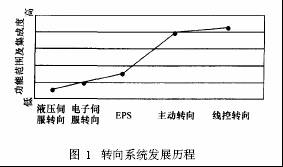
??? 現(xiàn)代車輛轉(zhuǎn)向系統(tǒng)發(fā)展至今大致可以劃分為5個(gè)階段[1],即液壓伺服轉(zhuǎn)向、電子伺服轉(zhuǎn)向、電動助力轉(zhuǎn)向(EPS)、主動轉(zhuǎn)向和線控轉(zhuǎn)向(SBW)。圖1顯示了這5種轉(zhuǎn)向系統(tǒng)與其它電控系統(tǒng)的集成度和功能范圍。電子伺服轉(zhuǎn)向相對于傳統(tǒng)液壓伺服轉(zhuǎn)向最大的優(yōu)點(diǎn)在于,通過引入傳感器技術(shù)使轉(zhuǎn)向助力大小可以根據(jù)車速變化,而EPS系統(tǒng)在此基礎(chǔ)上還具有主動阻尼功能和回正功能。
??? 
??? 在傳統(tǒng)齒輪齒條轉(zhuǎn)向系統(tǒng)中,轉(zhuǎn)向盤到前輪的轉(zhuǎn)向傳動比是固定的。轉(zhuǎn)向系定傳動比設(shè)計(jì)的缺陷主要表現(xiàn)為:低速或停車工況下駕駛員需要大角度地轉(zhuǎn)動轉(zhuǎn)向盤,而高速時(shí)又不能滿足方向穩(wěn)定性要求。同時(shí)滿足轉(zhuǎn)向系統(tǒng)在低速時(shí)的靈活性要求與高速時(shí)的穩(wěn)定性要求,是當(dāng)今車輛轉(zhuǎn)向系統(tǒng)設(shè)計(jì)的核心問題之一。
??? 德國寶馬公司和ZF公司聯(lián)合開發(fā)的前輪主動轉(zhuǎn)向系統(tǒng)(AFS)完美地解決了上述問題,并已裝備于部分寶馬3系列和5系列轎車上[2-4]。該系統(tǒng)能夠?qū)崿F(xiàn)獨(dú)立于駕駛員的轉(zhuǎn)向干預(yù),從而達(dá)到主動改變前輪轉(zhuǎn)向角的目的。
??? 前輪主動轉(zhuǎn)向技術(shù)的核心在于通過對前輪施加一個(gè)不依賴駕駛員轉(zhuǎn)向盤輸入的附加轉(zhuǎn)角來提高車輛的操縱性、穩(wěn)定性和軌跡保持性能。根據(jù)附加轉(zhuǎn)角疊加方式的不同,又可分為機(jī)械式和電子式。機(jī)械式的代表就是文中所介紹的寶馬主動轉(zhuǎn)向系統(tǒng),通過行星齒輪機(jī)械結(jié)構(gòu)增加一個(gè)輸入自由度從而實(shí)現(xiàn)附加轉(zhuǎn)向;電子式的代表就是線控轉(zhuǎn)向技術(shù),綜合駕駛員轉(zhuǎn)向角輸入和當(dāng)時(shí)的車輛狀態(tài)來決定轉(zhuǎn)向電機(jī)的輸出電流,最終驅(qū)動前輪轉(zhuǎn)動。線控轉(zhuǎn)向和機(jī)械式主動轉(zhuǎn)向系統(tǒng)最大的區(qū)別體現(xiàn)在當(dāng)系統(tǒng)發(fā)生故障時(shí),機(jī)械式主動轉(zhuǎn)向系統(tǒng)仍能通過轉(zhuǎn)向盤與車輪間的機(jī)械連接確保其轉(zhuǎn)向性能,而線控轉(zhuǎn)向必須通過系統(tǒng)主要零件的冗余設(shè)計(jì)來保證車輛的安全性。此外,由于機(jī)械式主動轉(zhuǎn)向系統(tǒng)中保留了完整的機(jī)械轉(zhuǎn)向結(jié)構(gòu),在轉(zhuǎn)向過程中可以獲得真實(shí)的路感,這一點(diǎn)是線控轉(zhuǎn)向所不具備的。因此,從轉(zhuǎn)向系統(tǒng)安全性和路感的角度出發(fā),機(jī)械式主動轉(zhuǎn)向是當(dāng)前轉(zhuǎn)向系統(tǒng)發(fā)展的一個(gè)重要方向。線控轉(zhuǎn)向技術(shù)由于受到法規(guī)的約束,可靠性和安全性是阻礙其投入實(shí)際應(yīng)用的最關(guān)鍵因素。
??? 對于機(jī)械式前輪主動轉(zhuǎn)向系統(tǒng)而言,其核心技術(shù)是實(shí)現(xiàn)附加轉(zhuǎn)角的機(jī)械機(jī)構(gòu)及其控制策略。文中以寶馬公司和ZF公司開發(fā)的主動前輪轉(zhuǎn)向系統(tǒng)為例,介紹該系統(tǒng)的組成、雙行星齒輪機(jī)構(gòu)及其工作模式、系統(tǒng)主要功能及其實(shí)現(xiàn)原理、系統(tǒng)的安全性設(shè)計(jì),為今后國內(nèi)轉(zhuǎn)向系統(tǒng)的開發(fā)提供參考。
??? 二、系統(tǒng)組成及核心部件結(jié)構(gòu)
??? (一)系統(tǒng)組成
??? 系統(tǒng)原理圖如圖2所示,主要由三大子系統(tǒng)組成[5]:液壓助力齒輪齒條動力轉(zhuǎn)向系統(tǒng),包括轉(zhuǎn)向齒輪和齒條、液壓伺服閥、轉(zhuǎn)向油泵、儲油器及管路;變傳動比執(zhí)行系統(tǒng),包括無刷同步伺服電機(jī)、雙行星齒輪機(jī)構(gòu)、電磁鎖止單元;電控系統(tǒng),包括裝于小齒輪處的角度傳感器(測量總的轉(zhuǎn)向角)、裝于伺服電機(jī)的角度傳感器、電氣連接及軟件模塊。
??? 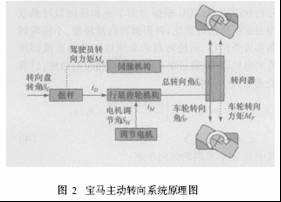
??? 該系統(tǒng)除傳統(tǒng)的轉(zhuǎn)向機(jī)械構(gòu)件外,主要包括兩大核心部件:一是一套雙行星齒輪機(jī)構(gòu),通過疊加轉(zhuǎn)向?qū)崿F(xiàn)變傳動比功能,二是Servtronic液力伺服轉(zhuǎn)向系統(tǒng),用于實(shí)現(xiàn)轉(zhuǎn)向助力功能。駕駛員的輸入包括力矩輸入和角輸入兩部分,共同傳遞給扭桿,其中的力矩輸入由液力伺服機(jī)構(gòu)根據(jù)車速和轉(zhuǎn)向角度進(jìn)行助力控制,而角輸入則通過由伺服電機(jī)驅(qū)動的雙行星齒輪機(jī)構(gòu)進(jìn)行轉(zhuǎn)向角疊加,經(jīng)過疊加后的總轉(zhuǎn)向角才是傳遞給齒輪齒條轉(zhuǎn)向機(jī)構(gòu)的最終轉(zhuǎn)角。與常規(guī)轉(zhuǎn)向系統(tǒng)的顯著差別在于,寶馬主動轉(zhuǎn)向系統(tǒng)不僅能夠?qū)D(zhuǎn)向力矩進(jìn)行調(diào)節(jié),而且還可以對轉(zhuǎn)向角度進(jìn)行調(diào)整,使其與當(dāng)前的車速達(dá)到完美匹配。
??? (二)雙行星齒輪機(jī)構(gòu)
??? 寶馬主動轉(zhuǎn)向系統(tǒng)的核心部件是一套集成在轉(zhuǎn)向柱上的雙行星齒輪機(jī)構(gòu),如圖3所示。這套機(jī)構(gòu)包括左右兩副行星齒輪機(jī)構(gòu),共用一個(gè)行星架進(jìn)行動力傳遞。左側(cè)的主動太陽輪與轉(zhuǎn)向盤相連,將轉(zhuǎn)向盤上輸入的轉(zhuǎn)向角經(jīng)由行星架傳遞給右側(cè)的行星齒輪副。而右側(cè)的行星齒輪副具有兩個(gè)轉(zhuǎn)向輸入自由度,一個(gè)是行星架傳遞的轉(zhuǎn)向盤轉(zhuǎn)角,另一個(gè)是由伺服電機(jī)通過一個(gè)自鎖式蝸輪蝸桿驅(qū)動的齒圈輸入,即所謂的疊加轉(zhuǎn)角輸入。右側(cè)的太陽輪作為輸出軸,其輸出的轉(zhuǎn)向角度是由轉(zhuǎn)向盤轉(zhuǎn)向角度與伺服電機(jī)驅(qū)動的轉(zhuǎn)向角度疊加得到。低速時(shí),伺服電機(jī)驅(qū)動的行星架轉(zhuǎn)動方向與轉(zhuǎn)向盤轉(zhuǎn)向相同,疊加后增加了實(shí)際的轉(zhuǎn)向角度;高速時(shí),伺服電機(jī)驅(qū)動的行星架轉(zhuǎn)動方向與轉(zhuǎn)向盤轉(zhuǎn)向相反,疊加后減少了實(shí)際的轉(zhuǎn)向角度,轉(zhuǎn)向過程會變得更為間接,提高了汽車的穩(wěn)定性和安全性。
??? 
??? 該齒輪機(jī)構(gòu)工作時(shí)具有如下3種驅(qū)動方式。
??? (1)伺服電機(jī)即蝸輪固定不動時(shí),轉(zhuǎn)向盤轉(zhuǎn)角通過主動太陽輪將動力傳遞給行星架,再由從動太陽輪輸出。與此同時(shí),前軸上的地面反力也通過相同的途徑為駕駛員提供轉(zhuǎn)向路感。這也是在不裝備主動轉(zhuǎn)向系統(tǒng)的車輛上駕駛員對于前輪轉(zhuǎn)向的操縱過程。此時(shí)電磁鎖止裝置不起作用,而伺服電機(jī)的輸入電流為零,保證蝸輪不轉(zhuǎn)動。
??? (2)轉(zhuǎn)向盤不動,即主動太陽輪固定時(shí),可由伺服電機(jī)驅(qū)動蝸輪通過行星齒輪機(jī)構(gòu)將動力傳遞給從動太陽輪。
??? (3)在通常情況下,主動太陽輪和伺服電機(jī)是共同工作的,車輪轉(zhuǎn)角是駕駛員轉(zhuǎn)向角和伺服電機(jī)調(diào)節(jié)轉(zhuǎn)向角的疊加。
??? 該布置方式的優(yōu)點(diǎn)[6]如下。
??? (1)保留了原來從轉(zhuǎn)向盤到轉(zhuǎn)向輪的機(jī)械連接,在電機(jī)發(fā)生故障時(shí)仍能保證轉(zhuǎn)向安全性。
??? (2)與傳統(tǒng)轉(zhuǎn)向系統(tǒng)相比,僅在轉(zhuǎn)向管柱上加入雙行星齒輪機(jī)構(gòu),而原有齒輪齒條轉(zhuǎn)向器的摩擦及剛度條件不變,對駕駛員來說有利于保持原有的操縱感覺;由雙行星齒輪機(jī)構(gòu)產(chǎn)生的作用反力矩,可通過改變原有的助力控制進(jìn)行補(bǔ)償。
??? (3)雙行星齒輪機(jī)構(gòu)運(yùn)行于低速條件,有利于減少噪聲。
??? (4)雙行星齒輪機(jī)構(gòu)與轉(zhuǎn)向管柱、轉(zhuǎn)向小齒輪集成在一起,使結(jié)構(gòu)更加緊湊。
??? (三)系統(tǒng)安全性設(shè)計(jì)
??? 為了保證系統(tǒng)實(shí)時(shí)安全可靠,對系統(tǒng)的安全性設(shè)計(jì)是極其必要的,其過程如下:首先對傳感器信號(如車輪轉(zhuǎn)速)進(jìn)行濾波處理,然后根據(jù)一定的預(yù)估算法計(jì)算出某一狀態(tài)變量的參考值(如橫擺角速度、小齒輪轉(zhuǎn)角),接著將由傳感器直接測得的狀態(tài)變量實(shí)際值與參考值進(jìn)行比較,得到一偏差。當(dāng)偏差在一定的門限范圍內(nèi)時(shí),認(rèn)為傳感器工作良好,可以采用該信號;當(dāng)偏差過大時(shí),則必有某一傳感器信號為錯(cuò)誤信號,需結(jié)合其他信號進(jìn)行故障診斷。
??? 蝸桿端部有一圓錐齒輪,如圖3所示,而電磁鎖止裝置中裝有預(yù)緊彈簧,在正常狀態(tài)下AFS的ECU給電磁鎖止裝置供電,保證圓錐齒輪和電磁鎖止裝置分離良好;當(dāng)伺服電機(jī)發(fā)生故障時(shí),ECU停止供電,預(yù)緊彈簧將把電磁鎖止裝置的端部壓入圓錐齒輪的某兩齒間,使得電機(jī)不再轉(zhuǎn)動,此時(shí)整個(gè)轉(zhuǎn)向系統(tǒng)如同一般的定傳動比系統(tǒng)進(jìn)行工作。
??? 三、系統(tǒng)的主要功能
??? 主動轉(zhuǎn)向系統(tǒng)所能實(shí)現(xiàn)的功能分類如圖4所示,主要包括駕駛員輔助功能以及穩(wěn)定車輛功能。下面對這兩大功能的實(shí)現(xiàn)原理作進(jìn)一步的闡述。
??? 
??? (一)駕駛員輔助功能
??? 駕駛員輔助功能主要包括可變轉(zhuǎn)向傳動比和轉(zhuǎn)向靈活性功能。轉(zhuǎn)向靈活性指的是車輛對駕駛員輸入的跟隨性能,可以通過在控制過程中加入諸如微分等環(huán)節(jié)[7-8],改善轉(zhuǎn)向系統(tǒng)的動態(tài)特性,盡可能減小橫擺角速度和側(cè)向加速度相對于轉(zhuǎn)向盤轉(zhuǎn)角輸入的相位滯后,從而達(dá)到轉(zhuǎn)向靈活的目的。
??? 可變轉(zhuǎn)向傳動比是寶馬主動轉(zhuǎn)向系統(tǒng)的核心功能之一,它主要通過疊加轉(zhuǎn)向的方法來實(shí)現(xiàn)。
??? 
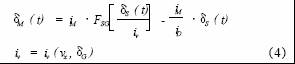
??? 式(1)給出了小齒輪轉(zhuǎn)角、轉(zhuǎn)向盤轉(zhuǎn)角和電機(jī)轉(zhuǎn)角的關(guān)系,δM為電機(jī)轉(zhuǎn)角,δG為小齒輪轉(zhuǎn)角,δS為轉(zhuǎn)向盤轉(zhuǎn)角,iM為電機(jī)頭部處蝸輪蝸桿的傳動比,iD為連接轉(zhuǎn)向盤的行星齒輪機(jī)構(gòu)的傳動比;式(2)中的FSG為δG和前輪轉(zhuǎn)角δF的非線性函數(shù)關(guān)系;式(3)給出了δS和δF的關(guān)系,iv為整個(gè)轉(zhuǎn)向系統(tǒng)傳動比。
??? 為了滿足轉(zhuǎn)向系統(tǒng)低速輕便、高速穩(wěn)定的要求,在設(shè)計(jì)時(shí)可事先根據(jù)理想的轉(zhuǎn)向動態(tài)響應(yīng)特性求出傳動比、轉(zhuǎn)向盤轉(zhuǎn)角和車速的關(guān)系,并做成表格存儲于ECU中,文獻(xiàn)[9]給出了相應(yīng)的推導(dǎo)過程。在實(shí)際行駛過程中,ECU根據(jù)當(dāng)前車速和轉(zhuǎn)向盤轉(zhuǎn)角獲得當(dāng)前所需的傳動比,再根據(jù)轉(zhuǎn)向盤轉(zhuǎn)角、小齒輪轉(zhuǎn)角和齒條位移、前輪轉(zhuǎn)角的非線性函數(shù)關(guān)系推得所需的電機(jī)轉(zhuǎn)角,最后驅(qū)動電機(jī)轉(zhuǎn)過相應(yīng)的角度,計(jì)算公式如式(4)所示。
??? 
??? 其中υx表示車輛的縱向車速。
??? (二)車輛穩(wěn)定性控制功能
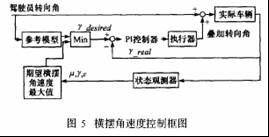
??? 除了可變傳動比設(shè)計(jì)外,穩(wěn)定性控制功能是寶馬主動轉(zhuǎn)向系統(tǒng)最大的特點(diǎn)。危險(xiǎn)工況下,該系統(tǒng)通過獨(dú)立于駕駛員的轉(zhuǎn)向干預(yù)來穩(wěn)定車輛,通過主動改變駕駛員給定的轉(zhuǎn)向盤轉(zhuǎn)角使得車輛響應(yīng)盡可能與理想的車輛響應(yīng)特性相一致。圖5為采用了模型跟蹤的控制策略[10-11]。首先通過線性2自由度參考模型并根據(jù)當(dāng)前駕駛員轉(zhuǎn)向角及車速計(jì)算得到期望的橫擺角速度,但期望橫擺角速度最大值又受到實(shí)際條件限制,|γd_max|=μg/v,μ為通過狀態(tài)觀測器觀測到的路面附著系數(shù),g為重力加速度。當(dāng)獲得了期望橫擺角速度后,對理想與實(shí)際橫擺角速度偏差進(jìn)行PI控制,得到所需的附加轉(zhuǎn)向角并控制伺服電機(jī)進(jìn)行輸出。
??? 
??? 類似于橫擺角速度控制功能,寶馬主動轉(zhuǎn)向系統(tǒng)還提供了橫擺力矩補(bǔ)償功能,以提高在分離系數(shù)路面上車輛的制動穩(wěn)定性。在該工況下由于左右輪上不等制動力會產(chǎn)生繞車輛質(zhì)心的橫擺力矩,使得車輛發(fā)生制動跑偏現(xiàn)象。傳統(tǒng)的電子穩(wěn)定程序(ESP)通過調(diào)節(jié)4個(gè)車輪上的制動力來使得左右車輪的制動力盡量相等,但以減小制動減速度、增大制動距離為代價(jià)。而主動轉(zhuǎn)向系統(tǒng)根據(jù)制動壓力等信號計(jì)算出所需補(bǔ)償?shù)臋M擺力矩并通過調(diào)整相應(yīng)的前輪轉(zhuǎn)向角來實(shí)現(xiàn)方向調(diào)節(jié)。在這一過程中,駕駛員無需對轉(zhuǎn)向盤進(jìn)行修正,減輕了駕駛員的工作負(fù)擔(dān),保持了制動時(shí)的方向穩(wěn)定性,減小制動距離,與傳統(tǒng)ABS/ESP相比可使制動距離最多減少15%。
??? (三)底盤集成控制技術(shù)
??? 與ESP等通過制動干預(yù)來穩(wěn)定車輛的方式相比,轉(zhuǎn)向干預(yù)具有以下優(yōu)點(diǎn):首先轉(zhuǎn)向干預(yù)不易為駕駛員察覺,對乘坐舒適性幾乎沒有影響,而制動干預(yù)不僅會產(chǎn)生較大的制動減速度,而且制動時(shí)發(fā)出的噪聲也會影響乘坐舒適性;其次,轉(zhuǎn)向干預(yù)比制動干預(yù)更加迅速,因?yàn)檗D(zhuǎn)向控制是通過伺服電機(jī)來完成的,而制動干預(yù)必須建立油壓,而這需要一定的時(shí)間;此外轉(zhuǎn)向干預(yù)相比制動干預(yù)對車速的改變較小,在危險(xiǎn)工況下通過轉(zhuǎn)向干預(yù)實(shí)現(xiàn)穩(wěn)定的車輛具有更高的通過速度,從而降低了和對面來車由于避讓不及發(fā)生碰撞的可能性。
??? 但轉(zhuǎn)向干預(yù)的缺點(diǎn)也是顯而易見的。受到原理限制,主動轉(zhuǎn)向的穩(wěn)定性功能只適用于過多轉(zhuǎn)向的工況。該工況下,通過疊加轉(zhuǎn)向減小前輪轉(zhuǎn)向角能夠減小前軸側(cè)向力,從而使得轉(zhuǎn)向過多的趨勢有所減緩;相反,在不足轉(zhuǎn)向工況下,受到輪胎非線性的限制,側(cè)向力達(dá)到飽和狀態(tài),通過增大前輪轉(zhuǎn)向角的方式是很難改變車輛不足轉(zhuǎn)向的趨勢的。此外,受到轉(zhuǎn)向機(jī)構(gòu)機(jī)械布置的限制,前輪轉(zhuǎn)向角的改變量是有限的,也就是說轉(zhuǎn)向干預(yù)穩(wěn)定車輛的能力弱于制動干預(yù),在某些極限工況下必須依賴ESP制動干預(yù)才能實(shí)現(xiàn)穩(wěn)定車輛的目的。
??? 為了充分發(fā)揮主動轉(zhuǎn)向系統(tǒng)和ESP電子穩(wěn)定程序的優(yōu)點(diǎn),最大限度地提高車輛在極限工況下的穩(wěn)定性,將兩者功能融合在一起進(jìn)行集成控制是最為有效的方法。由ContinentalTeves公司推出的第2代ESP系統(tǒng)充分體現(xiàn)了這一思想[12],該系統(tǒng)具有提高車輛穩(wěn)定性,拓寬極限行駛區(qū)域,減小轉(zhuǎn)向幅度,更少產(chǎn)生由于制動干預(yù)引起的急劇減速,從而使車輛行駛安全性、舒適性以及駕駛樂趣得到大大提高。
??? 為了進(jìn)一步提高車輛的動力學(xué)性能,還可以在此基礎(chǔ)之上繼續(xù)引入諸如可調(diào)減振器、主動穩(wěn)定性控制和可調(diào)彈簧等電子底盤控制系統(tǒng)。圖6展示了一種車輛底盤集成控制系統(tǒng)結(jié)構(gòu)[13]。
???
??? 四、結(jié)論
??? 寶馬主動轉(zhuǎn)向系統(tǒng)通過一組雙行星齒輪機(jī)構(gòu)實(shí)現(xiàn)了獨(dú)立于駕駛員的轉(zhuǎn)向疊加功能,完美地解決了低速時(shí)轉(zhuǎn)向靈活輕便,高速時(shí)保持方向穩(wěn)定性的矛盾,并在此基礎(chǔ)上通過轉(zhuǎn)向干預(yù)來防止極限工況下車輛過多轉(zhuǎn)向的趨勢,進(jìn)一步提高了車輛穩(wěn)定性。
??? 同時(shí),該系統(tǒng)能方便地與其他動力學(xué)控制系統(tǒng)進(jìn)行集成控制,為今后汽車底盤一體化控制奠定了良好的基礎(chǔ)。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關(guān)閱讀:
( 發(fā)表人:admin )