基于SAR系統的無人機定位導航系統的設計
引言
無人飛機與載人飛機相比,它具有體積小、造價低、使用方便、對作戰環境要求低、戰場生存能力較強等優點,備受世界各國軍隊的青睞。無人駕駛飛機以其準確、高效和靈便的偵察、干擾、欺騙、搜索、校射及在非正規條件下作戰等多種作戰能力,發揮著顯著的作用,并引發了層出不窮的軍事學術、裝備技術等相關問題的研究。
高空長航時無人機的飛行高度利于觀測星體,為此,考慮在慣性/SAR 組合基礎上,采用慣性導航和星光組合,可以為SAR 成像提供高精度的姿態信息,提高SAR 成像質量。
本文以長航高空無人機成像期間對導航高精度要求為應用背景,開展了基于SAR 輔助的慣導/星光組合導航研究,結合SAR 工作的非連續特性,設計了SAR/慣導/星光組合導航定位方案,提出了非同步輸出多傳感器異步集中卡爾曼濾波算法,可有效提高導航定位系統的自主性和精度。
1 卡爾曼濾波器設計
設位移 s 時,飛機的位置坐標為X (s),對于不同的位移值,均有一個X (s)值與之對應,當取樣位移不間斷變化時,就得到位置坐標序列{X (s),X(s+1)……},飛機位置預測序列{X (s+1),X(s+2)……},該序列是系統噪聲等驅動的一階遞歸模型,在x 軸方向推導狀態方程如下:
?
測量方程如下:
?
Zx (s)為s位移時飛機坐標x軸向的測量值。
H 為測量參數,它是由測量系統和測量方法所確定,不隨位移變化的一個常數,因為是單模型,取為1,V(s)為測量噪聲。
均方估計誤差為Px (s+1) = E[Xx (s +1) — Xx (s)]2,在均方估計誤差為最小的準則下,通過數學推導,即可得出飛機自動控制的卡爾曼濾波公式,如下:
預估計方程:
?
計算卡爾曼濾波增益,得:
?
均方預測誤差方程:
?
同理,可以推導y,z 軸向的狀態方程,則飛機位置的狀態方程如下:
?
卡爾曼濾波是以預測加修正來實現濾波遞推的,其這個性質,很容易通過計算機仿真實現,從而可以完成對飛機位置的預測,預估計方程:
?
同時,與地面基站雷達測量值進行比對,調飛機因為機械振動等原因造成的位移偏差,其濾波模型為:
?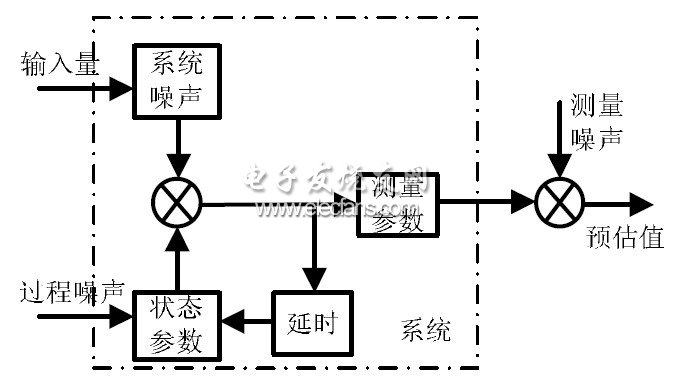
圖 1 卡爾曼濾波的系統模型框圖
2 SAR 輔助的慣導/星光組合導航系統
SAR 圖像導航雖然具備較高的定位精度和自主性,但是其成像時僅能部分時段工作,而且對系統的姿態水平精度要求較高,而基于星敏感器的星光導航系統具有很高的姿態測定精度,因此,在采用慣導/星光姿態組合的同時,分時段地接入SAR 圖像導航信號,能夠保證系統具有較高的定位精度和定姿精度。考慮到SAR 圖像導航僅能分時段工作,在實際應用過程中主要根據任務需要接入SAR 圖像導航系統,本文設計了如圖2 所示的基于SAR輔助的慣導/星光姿態組合導航系統。
將慣性導航系統與衛星定位、地理信息系統、里程儀組合構成的導航定位系統,既具有慣性導航的自主性、實時性又具有衛星定位系統的高精度、誤差無積累等優點,有效地克服了慣性導航系統的累積誤差和漂移誤差,提高了系統的精度和可靠性。組合導航定位系統多用光學陀螺、機械陀螺和加速度表構成捷聯式慣性導航,以地理信息匹配、衛星定位信息、里程計信息等為輔,慣導信息為主,采用卡爾曼濾波技術實現信息的最優綜合以獲得最佳的導航定位參數。
?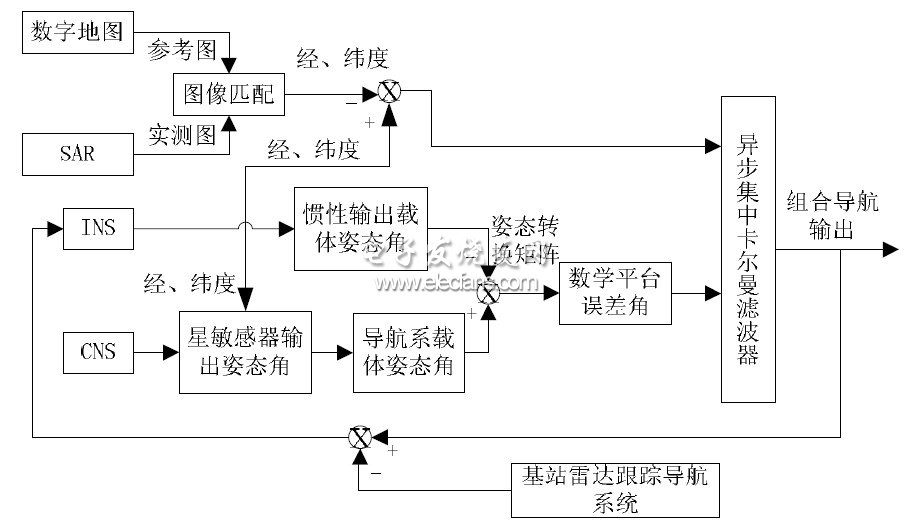
圖2 基于SAR 輔助的慣導/星光組合導航系統
從圖 1 可以看出:SAR 輔助的組合導航系統由按照任務需要可以靈活接入的SAR 圖像導航、慣導/星光姿態組合導航部分和地面基站雷達跟蹤系統三部分構成,激光陀螺捷聯慣導組合最主要的特點是采用了激光陀螺技術,與機械陀螺相比,激光陀螺無需模數轉換脈沖輸出,是捷聯式慣導系統的理想元件,而且構成捷聯慣導系統的慣性敏感元件直接與載體相連,省去了結構復雜的機械平臺,因而較機械慣導系統體積小、重量輕、可靠性高;此外激光陀螺捷聯慣導組合還具有抗干擾能力強、啟動時間短等技術特點,符合飛機快速飛行以及在強電磁干擾背景下精確定位的實際需求,在導航精度、環境適應能力、可靠性等方面可以很好地滿足了使用要求。雷達跟蹤系統導航輸出通過無線模塊發送給無人飛機,其信號與組合導航輸出的信號構成反饋信號。系統綜合運用激光陀螺捷聯慣導、光學測距測角、衛星定位、無線通信、數字地圖和地理信息處理,基站式雷達跟蹤等多項技術,采用組合導航系統和自主式快速標定方法。
3 具體實現
飛機首先通過激光陀螺組合定位定向導航系統實現絕對位置、方向基準的建立和動態保持,并結合地面基站的雷達系統定位結果進行誤差消除,具體實現過程描述如下:
(1)絕對位置和方向基準的確定:飛機處于停機狀態,組合定位導航系統尋北、初始對準,通過激光陀螺、加速度計分別測量地球自轉角速度矢量與重力場矢量方向,根據所在緯度區域,確定真北方向。位置基準的確定是利用衛星定位系統、數字地圖或地理信息得到的。
(2)位置和方向基準的動態保持:組合定位導航系統尋北、初始對準完成后,進入定位定向導航狀態。在飛機飛行過程中,實時測量激光陀螺載體在慣性空間中的姿態,從而可計算出慣性組合坐標系與當地水平地理坐標系的轉換關系,實現動態方向基準保持。同時,利用里程儀信息實現組合導航,確定飛機的位置變化。
(3)地面基站實時定位導航:地面設置多個基站,基站負責對飛機實時定位,并通過無線模塊將位置信息和速度信息發送給飛機。
(4)誤差消除:SAR 輔助的組合導航系統輸出與地面雷達定位輸出形成定位誤差和速度誤差,將定位誤差作為慣性導航系統的輸入,形成一個閉環系統,進行誤差的消除。誤差消除過程中最關鍵的問題在于解決多傳感器組合導航系統存在SAR 和星光信息的輸出不同步的問題,為此采用異步集中卡爾曼濾波器處理不同頻率信息的同步問題。
4 結論
飛機導航定位工作主要由組合定位定向導航系統完成,組合導航系統實時閉環輸出位置和姿態信息,為飛機提供精確的方向基準和位置坐標,同時實時根據姿態信息對飛機飛行狀態進行預測。組合導航系統由激光陀螺捷聯慣性導航、衛星定位系統接收機、組合導航計算機、里程計、高度表和基站雷達系統等組成。結合了SAR 圖像導航的定位精度、自主性和星敏感器的星光導航系統的姿態測定精度,從而保證了無人飛機的自主飛行。
非常好我支持^.^
(5) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 基于Tricore芯片的AUTOSAR架構下的多核啟動 2023-10-23
- [電子說] 如何實現RTOS、中間件和芯片廠商API的跟蹤可觀察性? 2023-10-20
- [電子說] QSPI Flash驅動功能解析和使用注意事項 2023-10-19
- [安全設備/系統] 汽車網絡安全機制關鍵技術 2023-10-18
- [電子說] 車規MCU的軟件開發生態解析 2023-10-18
- [控制/MCU] 基于STM32F407的USB轉串口功能實現 2023-10-16
- [電子說] 思嵐推出搭載全新的SLAM自主定位導航系統及激光視覺多重導航方案 2023-10-13
- [MEMS/傳感技術] 常見的幾種星載SAR傳感器 2023-10-11
( 發表人:大本 )