基于nRF24L01和PIC16F877的無線數據傳輸系統設計 - 全文
在工業控制現場, 常常需要采集大量的現場數據, 如溫度、濕度、氣壓等, 并將這些數據傳輸到主機進行處理,由主機根據處理的結果, 將控制信號傳輸給現場執行模塊進行各種操作。可以看出數據從采集設備到處理終端,監測控制指令從處理終端到采集設備,均需經過傳輸過程這一重要環節。當數據采集點處于運動狀態,或者所處的環境不允許鋪設電纜,采集設備必須與終端設備分離,此時只能通過無線方式進行數據傳輸。基于此,本文設計了一個無線數據傳輸系統,它應用Microchip公司的PIC16F877單片機控制Nordic公司的無線數字傳輸芯片nRF24L01 ,通過無線方式進行數據雙向傳輸。實驗結果證明:該系統使用靈活、成本低廉,可方便地嵌入到無線監測系統中。
nRF24L01芯片的介紹
nRF24L01是單片射頻收發芯片,工作于2.4~2.5 GHz ISM頻段。工作電壓為1.9~3.6 V,有多達125個頻道可供選擇。可通過SPI寫入數據,最高可達10 Mb/s,數據傳輸率最快可達2 Mb/s,并且有自動應答和自動再發射功能。和上一代nRF2401相比,nRF2401數據傳輸率更快,數據寫入速度更高,內嵌的功能更完備。
芯片內置頻率合成器、功率放大器、晶體振蕩器、調制器等功能模塊,并融進了增強式ShockBurst技術,其中輸出功率和通信頻道可通過程序進行配置。芯片能耗非常低,以-6 dBm的功率發射時,工作電流只有9 mA,接收時工作電流只有12.3 mA,多種低功率工作模式(掉電模式和空閑模式)使節能設計更方便。
系統總體結構設計

圖1為系統設計總體框圖。此無線數據傳輸系統主控制芯片采用Microchip公司的PIC16F877微處理器,它負責控制無線芯片L01,實現數據的無線傳輸。為了進行多通道的數據采集,這里采用10片A/D進行分時采樣,它們的工作時序則由CPLD來控制,每路采集的數據經單片機處理后無線發射,至于何時采樣,則由單片機發的Trigger信號決定。 在與計算機的通訊方面,系統采用USB芯片通過USB口將無線接收數據送入計算機,并存儲在一個二進制文件內,當傳輸完畢后,運行VB讀數軟件,可將采集的信號讀出以供分析。
系統硬件設計
數據采集部分
數據采集部分主要由傳感器、低通濾波放大器、A/D以及CPLD組成,電源管理則主要為各個芯片提供合適工作電壓,并為CPLD提供1MHZ主時鐘輸入。此系統采用10片AD7492,可進行10路模擬信號的采樣。CPLD主要控制10片A/D的采樣和讀數時序,采樣率由CPLD內部分頻器和無線傳輸率大小決定。為了配合無線傳輸模塊的工作,這里采用觸發采樣。即在CPLD內部設計D觸發器,并用VCC連接D輸入端,Trigger信號作為時鐘輸入,如圖2所示。系統上電后,CPLD便檢測其引腳Trigger端,當出現上升沿時, D觸發器輸出高電平,打開與非門,Convast就會輸出1KHz信號,A/D采樣開始。
無線傳輸部分
數據傳輸主要利用PIC16F877單片機對無線射頻芯片L01的控制實現的。nRF24L01是單片射頻收發芯片,工作于2.4~2.5GHzISM頻段,工作電壓為1.9V~3.6V,工作溫度為- 40℃~+ 85℃,有多達125個頻道可供選擇,最高通信速率2Mbit/s ,具有自動應答和重發功能,其工作參數全部通過芯片狀態字配置,而這些配置字是由PIC16F877通過SPI[1]訪問L01的。L01主要技術為:
工作模式 :CE,CSN,SCK,MOSI,MISO,IRQ這6個管腳為該芯片的控制引腳。微處理器通過對這6個引腳的控制就可以決定該芯片的工作模式。當PWR_UP、PRIM_RX和CE為“111”時,L01處于接收模式;為“101”時處于發射模式;為“1X0”時處于空閑模式1;為“0XX”時處于掉電模式。
增強型ShockBurst技術:L01融進了增強型ShockBurst技術,該項技術使得雙向通信協議變得簡單。在一個典型的雙向通信中,接收方在收到發射方的數據時,將會向發射方回傳一個應答信號,若接收方未收到該數據,發射方在等待一定延遲時間后將自動重發此包數據(在自動重發功能開啟的情況下),這都不需要CPU的參與。
數據通道:當L01處于接收狀態時,它可以接收來自6個不同通道的數據。每個通道都有一個屬于自己的通道地址,但共享同一頻道。也就是說,一個配置為接收模式的L01可以和6個配置為發射模式下的L01進行通信,接收機可以根據它們的通道地址進行區分。通道0有一個40位的地址,通道1—5則共享高32位地址,只是低8位不同。每個通道都能開啟自動重發射和自動應答功能。處于接收狀態下的L01在回傳應答信號時,將利用該接收通道的地址作為發射應答信號的發射地址。在發射設備中,通道0常用于接收應答信號。發射數據的地址必須和接收通道0的地址一致 ,這樣才能有效地接收應答信號。
數據包描述:“1字節字頭 + 3~5字節地址 + 9Bit標志位 + 1~2字節CRC”。 當L01要發送數據時,微控制器要先把地址和有效數據寫入L01緩存區,然后由L01自動產生字頭和CRC校驗碼,之后再發射出去。
USB接口設計
系統采用USB芯片FT245,由單片機控制讀寫操作。FT245提供了一些狀態標志位(RXF,TXE)供單片機查詢,以便讓單片機發讀寫脈沖執行讀寫操作,控制非常簡單。
軟件設計
要設計好系統的軟件,必須清楚其工作原理:首先給發射機上電,配置其L01為PRX,使其進入接收模式等待主機的握手指令,此時采集裝置并未開始工作。然后將接收機通過USB接口連接計算機,運行VB程序,點擊開始試驗按鈕,握手指令(H’33’)便通過接收機的L01 (上電配置為PTX)發射出去,發射機在接收到握手指令后,還要做出判斷,若不是H’33’,則繼續等待握手指令;若是,表示雙方建立連接成功,此時發射機的L01便配置為PTX,同時單片機向采集裝置發送一脈寬為3.6us的高電平脈沖以激活A/D,使其開始采樣,采樣率為1KHz。由于每路傳感器信號都要被A/D采樣,并轉換為12bit數字量(認為是2 Byte),那么10通道則為20 Byte,經過單片機處理后再送入L01打包發射。350us之后,接收機收到該數據,并通過單片機和USB芯片實時寫入計算機緩存區內,這樣雙方數據傳輸10000次,每次20Byte,傳輸完畢后數據曲線會在VB界面上實時顯示。
基于以上分析,該系統軟件分為兩部分:單片機控制程序和計算機界面程序。前者主要完成以nRF24L01為核心的多通道信號的采集和無線傳輸,后者則完成信號的顯示,以供研究人員分析。本文只介紹控制程序,它采用模塊化程序設計方法, 分為發射機程序和接收機程序兩部分。其流程圖如圖3所示。
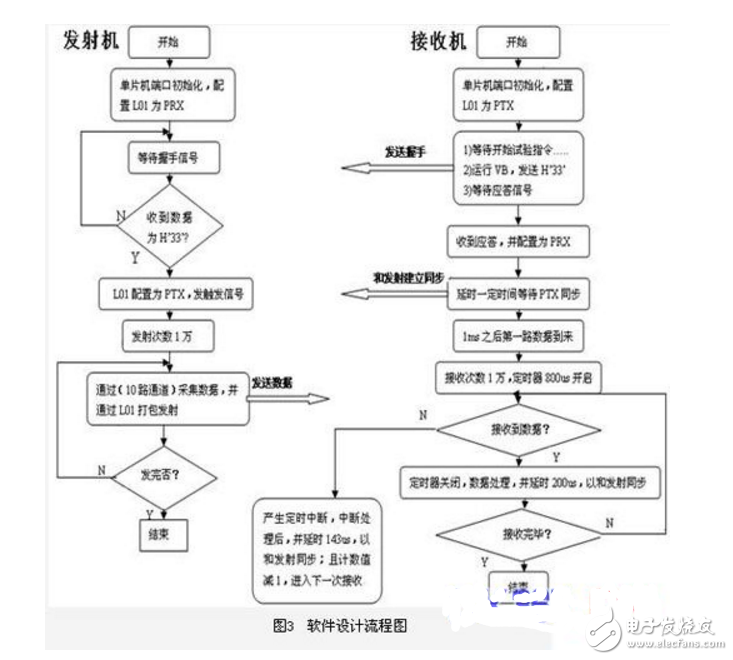
由于采集系統以1KHz進行采樣,即每1ms送20Byte數據,因此無線部分進行一次傳輸需1ms。若接收機執行接收子程序不夠1ms,則必須通過延遲補夠,以和發射同步。另外,在接收機程序中特設置800us定時器中斷,以防接收機因接收不到數據而長時間等待,影響數據的傳輸效率。
問題分析
本系統在運行時出現了一些問題,使其不能正常工作,現說明如下:
① L01在收發轉換時出現問題;
原因:配置字并未寫入L01內。
② 數據傳輸時發現其低八位為零,但高四位有數;
原因:開啟了單片機的PSP功能,導致D口不能用了。
③ 數據傳輸波形圖嚴重失真;
原因:無線模塊在收發同步上存在問題,數據包之間沒有一一對應。
實驗結果
本系統需進行10000次數據傳輸,每次傳輸20字節。傳輸數據時務必保證發射機和接收機的同步性,否則數據包之間將會出現錯位,得到的數據曲線會嚴重失真,影響分析,所以同步問題在無線數據傳輸系統占重要地位。現附上本系統在同步良好情況下的無線數據傳輸波形圖,見圖4。圖中的10條曲線是傳感器信號被10片A/D采樣后經無線傳輸至計算機后通過VB界面顯示出的,中間幅值較高的曲線是兩路正弦波,其余為基線。
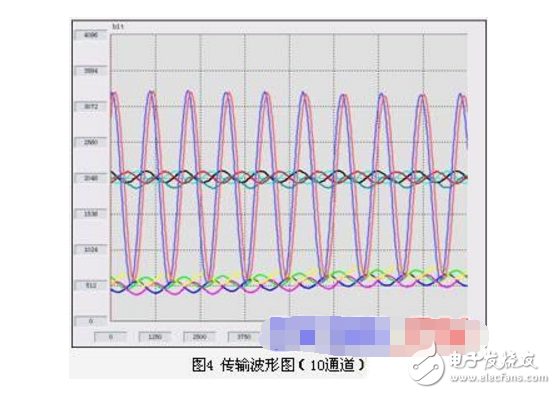
本系統控制方便、工作穩定,能實現可靠的無線數據傳輸。經大量實驗測得:該系統的平均傳輸率可以達到256Kbps,平均誤碼率只有0.2%,可滿足絕大部分無線數據傳輸的需要。
- 第 1 頁:基于nRF24L01和PIC16F877的無線數據傳輸系統設計
- 第 2 頁:軟件設計
- 第 3 頁:問題分析與實驗結果
本文導航
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關閱讀:
- [電子說] 構建一個無線辦公室呼叫鈴電路 2023-07-25
- [電子說] 詳解nRF24L01無線收發模塊設計 2023-05-26
- [電子說] 能2公里無線遙控的2.4GHz遙控器 2023-03-04
- [電子說] nRF24L01+RF模塊教程 2023-02-24
- [電子說] 如何使用PIC16F877A和ACS712-5A制作數字電流表 2023-01-25
- [電子說] 如何在PIC16F877A微控制器中使用EEPROM保存數據 2023-01-25
- [電子說] 如何在PIC16F877A微控制器中使用中斷 2023-01-25
- [電子說] nRF24L01無線通訊模塊的驅動設計與實現 2022-12-08
( 發表人:李倩 )