 電子發(fā)燒友App
電子發(fā)燒友App


在駕駛員、汽車和環(huán)境三者組成的系統(tǒng)中,汽車和環(huán)境之間的最基本的聯(lián)系是輪胎與地面之間的作用力。由于汽車行駛狀態(tài)主要是由輪胎與地面之間的縱向作用力和橫向作用力決定的,因此車輪與地面之間的作用力必然要受到輪胎與路面之間附著力的限制。ABS系統(tǒng)可最大限度地利用輪胎與路面之間的縱向和橫向附著系數(shù),從而在制動(dòng)過程中增強(qiáng)汽車的穩(wěn)定性,防止側(cè)滑和擺尾,同時(shí)在緊急制動(dòng)過程中保持轉(zhuǎn)向操作的穩(wěn)定性能,有效利用縱向附著力可以縮短汽車制動(dòng)距離,減輕輪胎磨損。隨機(jī)電子控制ABS系統(tǒng)可根據(jù)其所處的狀態(tài)將車輪的運(yùn)動(dòng)狀態(tài)與路面的附著聯(lián)系進(jìn)行及時(shí)的、準(zhǔn)確的控制,適應(yīng)了汽車制動(dòng)系統(tǒng)日益發(fā)展的需要,是國際ABS的主流。
由于汽車行駛時(shí)輪胎與地面之間的縱向作用力和橫向作用力是非線性的,依舊存在一定的缺陷,通過研究ABS系統(tǒng)制動(dòng)力的非線性變化,提出改進(jìn)對(duì)策。
電子控制ABS的工作原理
汽車制動(dòng)時(shí)由于車輪速度V1與汽車速度V2 之間存在的差異。當(dāng)汽車正常運(yùn)行時(shí),V1≥V2;當(dāng)汽車制動(dòng)時(shí),V1≤V2 ;因而會(huì)導(dǎo)致汽車輪胎 與地面之間產(chǎn)生滑移。如圖1所示,道路附著系數(shù)與車輪滑移關(guān)系曲線可以看出:滑移率
當(dāng)車輪以純滾動(dòng)方式與路面接觸時(shí),其中S=0,為純滾動(dòng)狀態(tài)。當(dāng)汽車車輪速度為汽車速度80%時(shí),S=20%,為連滾帶滑狀態(tài),此時(shí)車輪具有最大的縱向附著力和較高的側(cè)向附著力; 當(dāng)車輪抱死并轉(zhuǎn)速為0時(shí),S=100%時(shí),其側(cè)向附著力最小,只要很小的側(cè)向力干擾,汽車便能產(chǎn)生側(cè)滑。風(fēng)力干擾、制動(dòng)不均、路面傾斜等,都會(huì)使汽車產(chǎn)生側(cè)滑。側(cè)滑在行駛安全中最危險(xiǎn),最易產(chǎn)生交通事故,所以汽車行駛時(shí),首先必需防止制動(dòng)抱死。
研究表明:當(dāng)滑移率8%≤S≤35%時(shí),能傳遞最大制動(dòng)力。制動(dòng)防抱死的基本原理就是依據(jù)上述的研究結(jié)論,通過控制調(diào)節(jié)制動(dòng)力,使制動(dòng)過程中車輪滑移率在合適的范圍內(nèi),以取得最佳的制動(dòng)效果。

圖 1 附著系數(shù)F與滑移率S的非線性關(guān)系曲線。

圖 2 對(duì)角車輪獨(dú)立調(diào)節(jié)控制的FKX-AC型ABS

圖3 全電子自動(dòng)控制ABS的系統(tǒng)方框圖
電子控制ABS的系統(tǒng)結(jié)構(gòu)
ABS系統(tǒng)通常由傳感器、控制器和調(diào)節(jié)器三部分組成,并通過線路連接成一個(gè)有機(jī)體,形成一個(gè)以滑移率為目標(biāo)的自動(dòng)控制系統(tǒng)。按照傳感器、控制器和調(diào)節(jié)器的配置和控制方式不同可組成不同的ABS系統(tǒng)。而不同的系統(tǒng)具有各自的成本和性能。
如圖2是對(duì)角車輪獨(dú)立調(diào)節(jié)控制的ABS系統(tǒng),它由兩套傳感器、一個(gè)兩通道控制器和兩個(gè)調(diào)節(jié)器組成,前軸傳感器布置在右前輪,后軸傳感器布置在左后輪,控制器布置在駕駛區(qū)儀表盤上,調(diào)節(jié)器分別連接到前、后制動(dòng)管路中。
傳感器:由一個(gè)永磁式傳感器和激磁環(huán)組成,傳感器一般固定在車軸或制動(dòng)底板上,激磁環(huán)則固定在輪轂上,它們以非接觸式將車輪傳動(dòng)的脈沖信號(hào)連續(xù)不斷的傳給控制器。
控制器:監(jiān)測(cè)、處理傳感器輸送來的信號(hào),將其信號(hào)處理成車輪的速度、減速度、加速度和滑移率,并按照預(yù)先設(shè)定的減速度、加速度和滑移率的門限值,將指令發(fā)給連接在制動(dòng)管路上的調(diào)節(jié)器,從而實(shí)施加氣、保持和放氣功能,調(diào)節(jié)管路的壓力,以滿足多個(gè)車輪在不同路面狀態(tài)下的最大制動(dòng)的要求。
調(diào)節(jié)器:是ABS的執(zhí)行部分,它負(fù)責(zé)調(diào)節(jié)壓力,以滿足多個(gè)車輪在不同路面狀態(tài)下的最大制動(dòng)力的要求。
電子控制ABS系統(tǒng)通道結(jié)構(gòu)
ABS系統(tǒng)的通道是指連接壓力調(diào)節(jié)器與制動(dòng)器的獨(dú)立液壓回路,按其數(shù)量可分為雙通道、三通道、四通道和六通道結(jié)構(gòu)。雙通道結(jié)構(gòu)有兩個(gè)傳感器,可獨(dú)立進(jìn)行調(diào)整。兩個(gè)后輪裝有一個(gè)傳感器,共用一個(gè)通道,其缺點(diǎn)是當(dāng)其中一后輪要抱死時(shí),另一個(gè)要一同調(diào)整。較為理想的是各個(gè)輪子都裝有傳感器,有自己的通道,都可以獨(dú)立調(diào)整。如二軸四輪汽車使用四通道結(jié)構(gòu)ABS系統(tǒng),三軸六輪汽車使用六通道結(jié)構(gòu)ABS系統(tǒng),確保最短的制動(dòng)距離和最佳的方向穩(wěn)定性。
電子控制ABS系統(tǒng)的非線性分析
根據(jù)圖1附著系數(shù)ф 與滑移率S的非線性關(guān)系可知:
縱向附著力系數(shù)
F縱=-K縱(S-0.2)2+0.825 (S≤20%)---------------------(1)
F縱=K縱(S—0.95)2+0.725 (S≥20%)----------------------(2)
K縱=0.17778
橫向附著力系數(shù)
F橫=—K橫S+ 0.73 -----------------(3)
K橫=0.73
從上述縱、橫向附著力的表達(dá)式可以看出:縱向附著力系數(shù)為S的非線性函數(shù),橫向附著力系數(shù)為S的線性函數(shù)。研究上述兩函數(shù),找出S為何值時(shí),F(xiàn)縱和F橫的諧調(diào)值最大,從而利用S來控制F,以達(dá)到最佳制動(dòng)效果。”
確定S的最佳數(shù)值:參考圖1和上述表達(dá)式(1)、(2)、(3)分析,考慮到縱、橫向附著力系數(shù)的比例關(guān)系。從圖1中可以看出,在20%≤S≤30%的情況下,表達(dá)式(2)的部分可以用表達(dá)式(1)替代;以F縱為函數(shù),S為自變量,可以確定F縱最大值的表達(dá)式,當(dāng)
時(shí),函數(shù)Φ縱有最大值,對(duì)表達(dá)式
進(jìn)行求偏導(dǎo),則有:
從該表達(dá)式可以看出:只有當(dāng)s=0.2時(shí),附著力系數(shù)最大,與k大小無關(guān),并且越小越好,即當(dāng),制動(dòng)效果最好。
根據(jù),確定傳遞函數(shù)的性質(zhì)和傳感器類型:傳遞函數(shù)
可見:f(s)是連續(xù)的線性傳遞函數(shù),但由于
F縱=-K縱(S-0.2)2+0.825 (20%≤S≤30%)是非線性,所以要采用的傳感器依然要用非線性傳感器。
電子控制ABS系統(tǒng)改進(jìn)對(duì)策
目前,傳統(tǒng)電子控制ABS的系統(tǒng)存在的問題:
(1) 采用共用通道時(shí),當(dāng)其中一輪要抱死時(shí),另一個(gè)對(duì)稱輪也要一同調(diào)整。
(2)由于通道內(nèi)的液體壓力受空氣壓縮泵的加氣狀態(tài)的影響,具有時(shí)變性和不確定性等特點(diǎn),因此會(huì)出現(xiàn)有時(shí)防抱死系統(tǒng)效果不佳和系統(tǒng)失靈的情況。
(3)由于通道內(nèi)的液體傳遞采用改變氣壓傳遞方法,在傳遞的過程中由于要進(jìn)行加氣、保持和放氣等過程,反應(yīng)速度較慢。
根據(jù)傳統(tǒng)電子控制ABS系統(tǒng)存在的上述三個(gè)問題,采取相應(yīng)的改進(jìn)對(duì)策:
(1) 采用獨(dú)立通道,當(dāng)其中一輪要抱死時(shí),另一個(gè)對(duì)稱輪不受影響。同時(shí),這樣做可以減少通道長度,提高反應(yīng)速度。
(2) 要解決由于通道內(nèi)的液體壓力(制動(dòng)氣室的氣壓)受空氣壓縮泵的加氣狀態(tài)的影響,導(dǎo)致其具有時(shí)變性和不確定性等特點(diǎn);采用電路替換通道,以提高傳遞速度和可靠性,克服時(shí)變性和不確定性等因素造成的缺陷。
(3) 要徹底解決傳統(tǒng)電子控制ABS系統(tǒng)存在的問題,就要采用全電子自動(dòng)控制ABS系統(tǒng)。將氣壓制動(dòng)改成電磁制動(dòng),以滑移率S為變量,經(jīng)傳感器將滑移率S變?yōu)殡姶判盘?hào),經(jīng)過單片機(jī)(可采用INTEL公司8798單片機(jī))處理,傳遞給電磁制動(dòng)剎車器件,這樣不僅提高了傳遞速度,同時(shí)也提高了可靠性系數(shù)。可確保汽車有最短的制動(dòng)距離和最佳的方向穩(wěn)定性。圖3為全電子自動(dòng)控制ABS的系統(tǒng)方框圖。
全電子自動(dòng)控制ABS系統(tǒng)的工程原理:由于采用電磁制動(dòng)系統(tǒng),當(dāng)緊急剎車時(shí),自動(dòng)進(jìn)入全電子自動(dòng)控制ABS的系統(tǒng),這時(shí)S為自變量,傳感器將此信號(hào)傳遞給單片機(jī)經(jīng)處理后,控制電磁制動(dòng)(電磁剎),如果電磁制動(dòng)過急,則電磁剎將此信號(hào)反饋給傳感器進(jìn)行自動(dòng)控制狀態(tài)調(diào)整。
- 電子控制(21555)
- 理論分析(5945)


聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。 舉報(bào)投訴
相關(guān)推薦
電子控制ABS系統(tǒng)的非線性理論是什么?
電子節(jié)氣門為什么要用非線性彈簧???
線性器件/系統(tǒng)和非線性器件/系統(tǒng)有什么區(qū)別
非線性效應(yīng)測(cè)量
非線性電路混沌實(shí)驗(yàn)誤差分析電感量與哪些因素有關(guān)?
ADC的積分非線性和微分非線性
[下載]現(xiàn)代控制理論課件
關(guān)于電子控制abs系統(tǒng)的知識(shí)點(diǎn)速看
基于FPGA的非線性校正設(shè)計(jì)方案
基于光載無線系統(tǒng)的非線性特征的兩個(gè)不同源分析
如何判斷某個(gè)元件是線性還是非線性?
有源器件系統(tǒng)中產(chǎn)生的非線性效應(yīng)如何避免?
李雅普諾夫穩(wěn)定性理論
汽車ABS臺(tái)架檢測(cè)方法研究
非線性電阻電路分析
 0
0非線性與多變量系統(tǒng)相關(guān)辨識(shí)
0高階非線性控制系統(tǒng)相平面的實(shí)現(xiàn)
33非線性控制系統(tǒng)的全局可鎮(zhèn)定
12現(xiàn)代控制理論電子教案
0現(xiàn)代控制理論精品課程課件 (免費(fèi)下載)
0基于非線性PID 的吊車防擺定位控制Anti-swing a
25基于多模型的非線性系統(tǒng)廣義預(yù)測(cè)控制
24一種非線性反饋線性化的控制方法及其應(yīng)用
21Hammerstein模型非線性預(yù)測(cè)控制的研究
16基于正交小波網(wǎng)絡(luò)的非線性系統(tǒng)辨識(shí)
14非線性電路簡介
0現(xiàn)代控制理論電子書
0不確定非線性系統(tǒng)的弱抖振滑模反演控制
14非線性系統(tǒng)輸出反饋控制
10膜式空氣彈簧非線性彈性特性有限元分析
20一種典型的非線性系統(tǒng)分析
12帶有未建模動(dòng)態(tài)的船舶減搖鰭的魯棒自適應(yīng)控制
16具輸入飽和之非線性系統(tǒng)適應(yīng)控制器之設(shè)計(jì)
30基于非線性控制的異結(jié)構(gòu)混沌同步控制
18非線性系統(tǒng)辨識(shí)
10非線性時(shí)滯系統(tǒng)魯棒控制器設(shè)計(jì)
12電源完整性理論基礎(chǔ)
136大跨度橋梁非線性顫振和抖振時(shí)程分析
12基于非線性控制的異結(jié)構(gòu)混沌同步控制
20帶有非線性擾動(dòng)的不確定奇異時(shí)滯系統(tǒng)的保性能控制
17基于模數(shù)轉(zhuǎn)換原理的非線性校正設(shè)計(jì)
21鉑電阻測(cè)溫非線性補(bǔ)償?shù)难芯?/a>
54典型非線性環(huán)節(jié)的設(shè)計(jì)與分析
 2794
2794
基于模糊理論的PLC鍋爐水位控制器
1362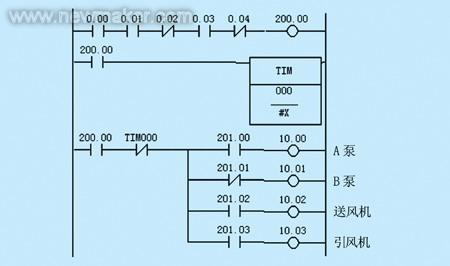
非線性部件的模擬
1249
基于輸入對(duì)狀態(tài)反饋線性化的非線性勵(lì)磁控制
570開槽波導(dǎo)3次諧波回旋行波放大管非線性理論與數(shù)值模擬
892
自激電子鎮(zhèn)流器非線性控制特性研究
55倒立擺的非線性穩(wěn)定控制實(shí)現(xiàn)
41具有非線性不確定性時(shí)滯系統(tǒng)控制算法的研究
16非線性軋機(jī)機(jī)電系統(tǒng)電機(jī)速度魯棒非脆弱控制_韓東穎
0基于Lyapunov穩(wěn)定性理論與Multisim軟件的風(fēng)力發(fā)電機(jī)混沌電路
10一個(gè)超混沌類Lorenz系統(tǒng)的非線性動(dòng)力學(xué)行為
7抑制非線性擾動(dòng)的迭代學(xué)習(xí)控制系統(tǒng)研究
0嵌入式系統(tǒng)的信號(hào)完整性理論分析
1078
風(fēng)電并網(wǎng)中非線性和隨機(jī)噪聲擾動(dòng)的同步控制
0雙向DC-DC非線性控制
1非線性電路的分析方法_非線性電路分析舉例
26727
超級(jí)電容儲(chǔ)能系統(tǒng)的非線性控制算法
1伺服系統(tǒng)復(fù)合控制技術(shù)和非線性補(bǔ)償技術(shù)
3974自動(dòng)控制系統(tǒng)教程之非線性系統(tǒng)分析的資料免費(fèi)下載
4何長安非線性系統(tǒng)控制理論的PDF電子書免費(fèi)下載
29電路分析與電子線路經(jīng)驗(yàn)談 從線性到非線性
5200基于非線性PID控制器的連續(xù)攪拌反應(yīng)釜
6電磁彈性理論及其應(yīng)用—電磁彈性結(jié)構(gòu)力學(xué)的理論模型等
2基于雙曲函數(shù)的Preisach類遲滯非線性建模與逆控制
1653
高壓放大器在非線性超聲傳播研究中的應(yīng)用
354
淺析非線性系統(tǒng)的相平面法
2203
汽輪機(jī)調(diào)速系統(tǒng)的非線性自適應(yīng)控制
0線性負(fù)載什么意思?非線性負(fù)載是什么意思?
1080電力系統(tǒng)中的非線性負(fù)載是怎樣引入諧波的?
423- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論