ROS 即Robot Operating System,顧名思義,就是機(jī)器人操作系統(tǒng),這個有點(diǎn)像對眼兒版馬力是基于ROS實際應(yīng)用的一個簡易機(jī)器人,雖然造價低廉,賣起萌來可毫不手軟
2012-07-09 09:43:50 19572
19572 ROS 2 Crystal Clemmys版機(jī)器人操作系統(tǒng)補(bǔ)充說明
2020-06-10 11:29:00
ROS是什么?ROS元操作系統(tǒng)有何作用?
2022-02-11 07:40:46
,ROS已經(jīng)開始為工業(yè)提供各種選項了,我們可以通過這三個方面進(jìn)一步了解ROS——ROS 1、ROS 2和ROS Industrial。讓我簡單解釋一下:ROS 1機(jī)器人操作系統(tǒng)(ROS)是一種用于編寫
2019-10-17 13:24:25
1、前記:這篇博文為自己學(xué)習(xí)是的記錄,做這一切的目的就是熟悉ROS環(huán)境下如何控制Baxter機(jī)器人做運(yùn)動。以便將來對其控制的擴(kuò)展,如基于視覺(單目,雙目,或Kinect)交互的控制,基于leap
2019-05-28 07:50:49
5、初始化rosdep一、ROS簡介1、什么是ROSros是機(jī)器人操作系統(tǒng)(Robot Operating System)的英文縮寫。ROS是用于編寫機(jī)器人軟件程序的一種具有高度靈活性的軟件架構(gòu)。2、ROS產(chǎn)生、發(fā)展和壯大的原因和意義ROS的發(fā)展逐漸的趨于成熟,近年來也逐步是面對著Ubuntu的更新而更
2021-12-17 08:24:40
ROS系統(tǒng)是什么
ROS(Robot Operating System)是一個適用于機(jī)器人的開源的元操作系統(tǒng)。它提供了操作系統(tǒng)應(yīng)有的服務(wù),包括硬件抽象,底層設(shè)備控制,常用函數(shù)的實現(xiàn),進(jìn)程間消息傳遞
2023-11-30 16:01:01
介紹坐標(biāo)系以及它們之間的變換關(guān)系,數(shù)學(xué)的意味還是很濃的。講了那么多的公式和規(guī)律,它們要怎么用在機(jī)器人上呢?這篇文章將介紹坐標(biāo)系和機(jī)器人之間的紐帶即連桿坐標(biāo)系。完成這篇文章的介紹之后我們就可以利用一些
2021-09-01 06:17:14
請各位大神指導(dǎo),移動式機(jī)器人是怎么做EMC保護(hù)的,機(jī)器人是鋰電池供電,所以就不能接大地了,那么對機(jī)器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
機(jī)器人操作系統(tǒng)淺析
2016-09-28 11:43:46
機(jī)器人的移動通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
機(jī)器人”的額外指導(dǎo)。圖1很好地展示了一個機(jī)器人系統(tǒng),其具有一般受保護(hù)的工作空間和一個協(xié)同操作空間。下面的視頻中對此也有介紹。ISO/TS 15066的關(guān)鍵主題之一是“功率和力限制”。在這種工作模式下
2018-10-30 11:33:11
有知道廣數(shù)或者珞石機(jī)器人的主控操作系統(tǒng)的嗎?做個小小的調(diào)查,可是一直沒問到,
2017-12-25 20:59:16
列舉部分學(xué)習(xí)過程中接觸的部分書籍,部分有中文版,部分有更新版本。1.機(jī)器人基礎(chǔ)書籍適合入門的書籍:機(jī)器人學(xué)機(jī)器人建模規(guī)劃與控制機(jī)器人學(xué)、機(jī)器視覺與控制——MATLAB算法基礎(chǔ)機(jī)器人學(xué)導(dǎo)論——分析控制
2019-05-22 06:53:10
如題。機(jī)器人的這個備份系統(tǒng)問題。想求大神講解一下哈。
2015-01-16 10:38:44
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
Matlab Robotcis Toolbox討論,Ros系統(tǒng)討論,歡迎有興趣做機(jī)器人的朋友一起來交流討論。QQ群,296587243
2016-03-06 10:43:07
最近新開個項目,控制單驅(qū)動輪的AGV小車,通過上位機(jī)(安裝ubuntu的PC機(jī))和下位機(jī)(BBB板)分別安裝ROS,通過ROS進(jìn)行無線通信和控制。不知有哪位高手在BBB板上移植過ROS,并且通過ROS通信時傳輸數(shù)據(jù)是否可靠?
2017-08-26 11:11:55
操作系統(tǒng) ROS ,這是硅谷全面提供機(jī)器人應(yīng)用開發(fā)包公司“柳樹車庫”開發(fā)的系統(tǒng),你既可以給它編程,也可以像教孩子做事一樣,通過動作和語言教會機(jī)器人完成任務(wù)。 現(xiàn)在,他們的重點(diǎn)已經(jīng)從如何制造機(jī)器人轉(zhuǎn)向
2015-01-22 10:04:11
逛街是一件痛并快樂的事,快樂是因為逛街所帶來的滿足,但是滿足之后問題也隨之來了,大包小包的東西要怎么帶回去呢,今天,小編為大家介紹一款購物狂的得力助手---Budgee機(jī)器人。
2020-08-26 07:26:21
NXP的芯片安裝Linux和ROS 是否可以?尋求合作目前我公司在過一個項目需要NXP芯片安裝Linux和機(jī)器人操作系統(tǒng)ROS,請求論壇里的好朋友指點(diǎn)一下,NXP的芯片是否能夠良好的支持,或者別的芯片也可以。
2020-09-04 08:48:07
機(jī)器人的常見機(jī)械系統(tǒng),對其機(jī)座、臂部、腕部、末端執(zhí)行器及傳動機(jī)構(gòu)均做了比較詳細(xì)的介紹;第3章主要介紹了工業(yè)機(jī)器人的運(yùn)動學(xué)及動力學(xué)等數(shù)學(xué)理論基礎(chǔ);第4章介紹了工業(yè)機(jī)器人的控制系統(tǒng);第5章介紹了工業(yè)機(jī)器人
2022-10-16 21:21:57
ROS 簡介雖然 Robot Operating System (ROS) 取名為機(jī)器人操作系統(tǒng),但其實它并不是一個操作系統(tǒng),而是在 Linux 之上開發(fā)的一系列軟件包。為了說明 ROS 開發(fā)的簡單
2022-04-01 11:38:37
全網(wǎng)最實用的STM32和ROS機(jī)器人的串口通信方案
2021-08-11 07:27:07
主控制器ROS控制器采用樹莓派4B或者Jetson Nano,運(yùn)行運(yùn)行Ubuntu Mate18.04或Ubuntu18.04系統(tǒng),具體型號有差異。系統(tǒng)安裝有ROS機(jī)器人操作系統(tǒng), ROS版本為Melodic版本,作為機(jī)器人端ROS節(jié)點(diǎn)控制器。樹莓派4B對比3B+升級明顯,主要功能包括高性能Cor
2021-07-30 06:59:38
申請理由:開發(fā)版可以很好的與機(jī)器人ros系統(tǒng)相配合,實現(xiàn)對機(jī)器人的控制,本人參加過飛思卡爾,對嵌入式有很深的了解項目描述:實現(xiàn)對機(jī)器人自動巡邏控制,實現(xiàn)通過網(wǎng)絡(luò)對機(jī)器人遠(yuǎn)程控制,實現(xiàn)遠(yuǎn)程觀看機(jī)器人視頻信息,實現(xiàn)機(jī)器人照顧老人或兒童,實現(xiàn)遠(yuǎn)程操控家中空調(diào),燈,電視等家電
2015-07-07 00:38:04
目的開源設(shè)計。項目計劃1、移植opencv和機(jī)器人操作系統(tǒng)(ROS)到HarmonyOS中,逐漸優(yōu)化成一個應(yīng)用層框架2、將用于比賽中的視覺目標(biāo)識別定位系統(tǒng)和slm系統(tǒng),代替?zhèn)鹘y(tǒng)使用x86pc系統(tǒng),實現(xiàn)低
2020-10-29 14:20:47
的網(wǎng)絡(luò)控制系統(tǒng)。正好想到,ROS正好有豐富的連接功能,于是移植ROS的驅(qū)動,運(yùn)行在Atom上會相當(dāng)有意思。有這個驅(qū)動,以后就可以在ROS上遠(yuǎn)程訪問IntoRobot板子了。如果你是做機(jī)器人的,還不
2016-04-07 21:25:21
根據(jù)上一篇文章解決Atom搭建機(jī)器人操作系統(tǒng)問題(一),在做庫移植的時候會遇到以下問題。。。。/main.cpp:1:17: fatal error: ros.h: No such file
2016-04-07 22:00:07
來控制。試用計劃主要有:1、開箱測試;2、讓linux操作系統(tǒng)跑起來;3、讓板子連上wifi;4、交叉編譯opencv等模塊;5、讓機(jī)器人實現(xiàn)室內(nèi)避障、導(dǎo)航;6、嘗試跑一跑機(jī)器人操作系統(tǒng)(ROS);7、如有可能,開發(fā)python驅(qū)動,讓小白也能玩轉(zhuǎn)高級機(jī)器人。
2016-10-20 15:49:46
對ROS機(jī)器人操作系統(tǒng)與stm32進(jìn)行交互控制,通過ROS的分布式管理用手柄無線控制小車。步驟1:采用ROS機(jī)器人系統(tǒng)做做處理,發(fā)布節(jié)點(diǎn)信息 2:stm32開發(fā)板采集數(shù)據(jù),通過can總線接收服務(wù),并控制小車
2015-07-23 15:26:44
Tran***ot ROS教育機(jī)器人如果你熱衷于編程探索和DIY創(chuàng)作,恰好又在尋找一款可以讓你自由發(fā)揮,二次開發(fā)的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育機(jī)器人將會非常適合你。對于這款機(jī)器人的裝箱清單,8個字形容:物資豐富,品質(zhì)過硬。
2021-11-25 20:33:50
本帖最后由 mu0543 于 2021-11-25 20:23 編輯
如果你熱衷于編程探索和DIY創(chuàng)作,恰好又在尋找一款可以讓你自由發(fā)揮,二次開發(fā)的ROS平臺,那么我們今天體驗的這款Tranbot ROS教育機(jī)器人將會非常適合你。對于這款機(jī)器人的裝箱清單,8個字形容:物資豐富,品質(zhì)過硬。
2021-11-25 20:13:59
機(jī)器人操作系統(tǒng)(ROS)入門(嵌入式系統(tǒng)應(yīng)用開發(fā))一、ROS 基本問題1. 什么是 ROS2. ROS 產(chǎn)生、發(fā)展和壯大的原因和意義二、安裝 ROS 及體驗小海龜例子1. 安裝 ROS一、ROS
2021-12-17 06:08:09
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
機(jī)器人操作系統(tǒng)入門:四(中科大&&重德智能)
2019-06-11 07:20:58
大家有知道廣州數(shù)控的機(jī)器人的主控操作系統(tǒng)是基于什么做的嗎?還有珞石機(jī)器人?或者我去哪可以查到呢?想做個簡單的調(diào)查~謝謝
2017-12-25 20:57:12
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-07-05 07:08:47
創(chuàng)龍TL5728-EasyEVM-A4開發(fā)板如何移植ros機(jī)器人操作系統(tǒng)?
2020-01-02 09:32:46
領(lǐng)域中。 二、專業(yè)建設(shè)及人才需求前景機(jī)器人制造廠商:需求機(jī)器人組裝、銷售、售后支持的技術(shù)和營銷人才。機(jī)器人系統(tǒng)集成商:需求機(jī)器人工作站的開發(fā)、安裝調(diào)試、技術(shù)支持等專業(yè)人才;機(jī)器人的應(yīng)用企業(yè):需求機(jī)器人
2015-09-02 14:03:18
`日本本田出品的這個ASIMO(阿西莫)機(jī)器人號稱最先進(jìn)仿人機(jī)器人,不知道有沒有大神研究過?求詳細(xì)資料啊`
2015-01-23 11:21:33
本實驗箱以大載重的全向麥輪車為載體,基于ROS系統(tǒng)作為開發(fā)平臺,使用雙驅(qū)和四驅(qū)兩種不同的結(jié)構(gòu)作為機(jī)器人本體,最終通過地面二維碼實現(xiàn)導(dǎo)航機(jī)器人的精確方向和距離控制...
2021-09-03 07:29:36
制造出像人一樣具有智能的能替代人類勞動的機(jī)器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機(jī)器人的研究中,具有視覺的機(jī)器人的研究也就成了第一位的。對機(jī)器人視覺伺服系統(tǒng)的研究是機(jī)器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機(jī)器人自動避障、軌跡跟蹤和運(yùn)動目標(biāo)跟蹤等問題中。
2019-09-27 08:07:35
樹莓派和其他機(jī)器人的控制器有何不同?如何使用樹莓派開發(fā)智能機(jī)器人控制系統(tǒng)?
2021-12-23 06:55:02
如何在ROS上使用其提供的serial包進(jìn)行串口通信。我的環(huán)境介紹:PC:使用的是Ubuntu 16-04 ROS-Kinetic嵌入式端:STM32F071ROS機(jī)器人操作系統(tǒng)是用于創(chuàng)建機(jī)器人系統(tǒng)的功能強(qiáng)大的平臺,其中包括開發(fā)項目所需的一切,從最簡單的軟件組件(稱為“節(jié)點(diǎn)”)和數(shù)據(jù)交換協(xié)議到真.
2022-02-21 07:27:14
,導(dǎo)航技術(shù),計算機(jī)技術(shù),人工智能等多個領(lǐng)域,因而對移動機(jī)器人的控制部分提出很高的要求,特別是視覺傳感器的出現(xiàn),要求控制系統(tǒng)不僅存儲量大,而且處理速度快等。以往基于PLC和單片機(jī)控制的移動機(jī)器人就不能很好
2020-11-23 15:08:52
怎樣去實現(xiàn)ROS機(jī)器人的定位導(dǎo)航呢?如何對ROS機(jī)器人的定位導(dǎo)航進(jìn)行仿真?
2021-12-23 09:22:45
目錄介紹一、底盤主控板二、嵌入式開發(fā)板1. 與上位機(jī)pc的關(guān)系2. 與STM32主控板的關(guān)系介紹自下而上的分析實體機(jī)器人(差分輪速機(jī)器人)搭建中的關(guān)鍵過程。一、底盤主控板本部分搭建實體機(jī)器人ros
2022-01-20 07:36:08
小麥機(jī)器人底盤使用手冊_V1.0文章目錄小麥機(jī)器人底盤使用手冊_V1.0硬件介紹:電源下位機(jī)樹莓派3B+Jetson nanoJetson TK1底盤鏡像以及燒錄過程系統(tǒng)鏡像Win燒錄軟件燒錄
2022-01-25 07:46:11
形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機(jī)器人應(yīng)用情況,是一個國家工業(yè)自動化水平的重要標(biāo)志。 機(jī)器人控制系統(tǒng)是機(jī)器人的大腦,是決定機(jī)器人功能和性能的主要因素。 工業(yè)機(jī)器人控制技術(shù)
2018-11-23 10:40:38
基本的ROS命令,然后對ROS的功能包、節(jié)點(diǎn)、主題以及消息進(jìn)行論述,以此來對ROS機(jī)器人操作系統(tǒng)的整體內(nèi)容進(jìn)行詳細(xì)的闡述。為了對書中選用的機(jī)器人的整體性能進(jìn)行描述,書中還給出了相關(guān)機(jī)器人的技術(shù)資料。9
2020-11-16 16:14:52
。兩家公司宣布,用于 RA MCU 的瑞薩電子 EK-RA6M5 評估套件是 micro-ROS 開發(fā)框架的官方支持硬件平臺。所述微ROS框架,作為業(yè)界機(jī)器人操作系統(tǒng)針對MCU,允許標(biāo)準(zhǔn)化集成的MCU到
2022-02-11 06:19:04
在物流搬運(yùn)行業(yè),拳頭機(jī)器人由于其獨(dú)特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場合。其中,拳頭機(jī)器人的視覺線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
2020-08-06 06:30:31
關(guān)于ros智能機(jī)器人,就是一個寫智能機(jī)器人代碼的一個虛擬機(jī),
2021-10-13 19:20:16
智能監(jiān)控機(jī)器人是近年來機(jī)器人應(yīng)用工程中一項前沿性的題目,智能化探測小車是智能行走機(jī)器人的一種。智能監(jiān)控機(jī)器小車就是針對上述情況,在參考了目前大多數(shù)智能機(jī)器人的基礎(chǔ)上,以降低成本為原則設(shè)計的。小車具備
2019-10-14 07:37:52
全網(wǎng)最實用的STM32和ROS機(jī)器人的串口通信方案小白學(xué)移動機(jī)器人同名公眾號:小白學(xué)移動機(jī)器人創(chuàng)作聲明:內(nèi)容包含虛構(gòu)創(chuàng)作內(nèi)容中的情節(jié)存在虛構(gòu)加工,僅供參考全網(wǎng)最實用的STM32和ROS機(jī)器人的串口
2021-08-20 06:33:28
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-06-30 06:37:34
隨著計算機(jī)科學(xué)和自動控制技術(shù)的發(fā)展,越來越多的不同種類的智能機(jī)器人出現(xiàn)在工廠、生活當(dāng)中,機(jī)器人視覺系統(tǒng)作為智能機(jī)器人系統(tǒng)中一個重要的子系統(tǒng),也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
求一款適合自己的操作系統(tǒng),主要用于機(jī)器人的控制方面的 ,哪位高手推薦一下 謝謝
2019-06-12 03:47:03
,這就對搬運(yùn)機(jī)器人的精準(zhǔn)配合提出了很高的要求。在實際操作過程中,不但在時間間隔上要有一定的分配,更要在完成碼垛的時間上有十分到位的要求。
2016-01-20 14:09:40
不知道是否支持ROS,想用這個板子做路徑規(guī)劃導(dǎo)航的?另外請問這個板子的操作系統(tǒng)是liteOS 還是OpenHarmony OS?謝謝!
2022-01-19 15:26:56
請問一下ROS機(jī)器人的硬件是由哪些部分組成的?分別有何功能?
2021-11-04 06:35:41
掃地機(jī)器人一般是用到什么實時操作系統(tǒng)啊
2020-04-10 04:36:00
菜鳥想要學(xué)習(xí)ROS機(jī)器人操作系統(tǒng),但是沒能找到系統(tǒng)的資料,請問有哪位大神研究過,可以分享一些資料嗎?跪謝了!!!!!!!!!
2019-02-19 23:14:23
的運(yùn)算和控制,相當(dāng)于機(jī)器人的靈魂,目前主流的三大機(jī)器人操作系統(tǒng)有Ubuntu,Android和ROS,Android軟件平臺使用較廣泛,ROS為專用的機(jī)器人的軟件平臺。要實現(xiàn)對服務(wù)機(jī)器人的運(yùn)算和控制
2017-06-09 17:18:49
控制器的主要作用是完成多軸運(yùn)動的計算與控制,因此機(jī)器人控制器的主控就需要擁有高性能的CPU、內(nèi)置實時操作系統(tǒng)、支持EtherCAT工業(yè)總線以及豐富的功能接口。 機(jī)器人控制器 基于以上需求,飛凌
2023-02-24 17:05:21
://emanual.robotis.com/docs/en/platform/turtlebot3/overview/1.先了解turtlebot3機(jī)器人的配置順序(1)配置調(diào)試用的遠(yuǎn)程電腦端,安裝Linux系統(tǒng)、ROS系統(tǒng)
2018-06-08 15:27:18
知識體系分解細(xì)化,對ABB工業(yè)機(jī)器人知識要點(diǎn)做了針對性解析,并配以詳細(xì)的操作步驟。全書以工業(yè)機(jī)器人組成為切入點(diǎn),系統(tǒng)地介紹了ABB工業(yè)機(jī)器人的主要技術(shù)參數(shù)、手動操縱方法、坐標(biāo)系定義流程、I/O配置過程
2018-10-29 17:03:22
江智黨建機(jī)器人是經(jīng)過多年的市場沉淀 ;現(xiàn)已可以提供系統(tǒng) 全方位的黨建機(jī)器人服務(wù)
2022-06-21 07:59:59
ROS 是 Robot Operating System 的縮寫,原本是斯坦福大學(xué)的一個機(jī)器人項目,后 來由 WillowGarage 公司發(fā)展,目前由 OSRF(Open Source
2017-09-13 17:23:23 14
14 ROS為Robot Operating System(機(jī)器人操作系統(tǒng))的簡寫,是一個面向機(jī)器人的開源元操作系統(tǒng)(open-source,me<x>ta-operating system
2017-09-19 18:55:2116 Operating System 的縮寫,原本是斯坦福大學(xué)的一個機(jī)器人項目,后來由 WillowGarage 公司發(fā)展,目前由 OSRF(Open Source Robotics Foundation,Inc)公司維護(hù)的開源項目。 1、首先是一個操作系統(tǒng) 根據(jù) wikipedia 定義,操作系統(tǒng)是用來管理計算機(jī)硬件
2017-09-26 14:08:2812 日前,在西班牙召開的第七屆機(jī)器人操作系統(tǒng)開發(fā)者大會(ROSCon 2018)上,微軟宣布Window10正式引入機(jī)器人操作系統(tǒng)(ROS)。ROS是由Willow Garage 和斯坦福人工智能實驗室維護(hù)的開源系統(tǒng),用于機(jī)器人標(biāo)準(zhǔn)化設(shè)計。
2018-10-10 15:42:073120 拋開它的名字,ROS并不是一個真正的操作系統(tǒng)。相反,它是一個框架和服務(wù)的集合,這些框架和服務(wù)提供了類似操作系統(tǒng)的功能,運(yùn)行在由機(jī)器人硬件支撐的異構(gòu)計算機(jī)集群之上。ROS服務(wù)包括硬件抽象、底層設(shè)備控制、進(jìn)程間消息傳遞和包管理。
2018-10-12 16:53:276550 的增長。機(jī)器人領(lǐng)域之所以快速增長,有一部分原因是得益于開源開發(fā)和機(jī)器人操作系統(tǒng)ROS或ROS2的發(fā)展。
2018-10-18 09:24:311811 機(jī)器人操作系統(tǒng)(Robot Operating System, ROS)是一個應(yīng)用于機(jī)器人上的操作系統(tǒng),它操作方便、功能強(qiáng)大,特別適用于機(jī)器人這種多節(jié)點(diǎn)多任務(wù)的復(fù)雜場景。 因此自ROS誕生以來
2019-10-09 08:00:005 據(jù)悉,ROS是面向機(jī)器人標(biāo)準(zhǔn)化設(shè)計的主流操作系統(tǒng)之一,誕生于2007年,來自Willow Garage和斯坦福人工智能實驗室,廣泛應(yīng)用于許多尖端機(jī)器人項目,每一位機(jī)器人設(shè)計師都可以使用該平臺進(jìn)行機(jī)器人軟件開發(fā)。
2021-01-23 10:29:193040 現(xiàn)在,利用ROS控制UR機(jī)器人的程序員可以使用新版本的機(jī)器人操作系統(tǒng)(ROS)。這個新的ROS版本提供了對機(jī)器人的笛卡爾控制,同時保持了機(jī)器人關(guān)節(jié)的安全速度,以避免超出安全的協(xié)作控制限制。 UR手臂
2021-03-25 16:46:112496 Acceleration Robotics?S.L.是一家位于巴斯克地區(qū)的機(jī)器人半導(dǎo)體初創(chuàng)公司,專注于通過FPGA和GPU為機(jī)器人設(shè)計定制大腦以加快其響應(yīng)速度,公司發(fā)布了機(jī)器人操作系統(tǒng)(ROS
2022-06-16 12:40:201685 8月10日,第八期2022機(jī)器人操作系統(tǒng)(ROS)暑期學(xué)校暨人工智能與機(jī)器人論壇(以下簡稱“論壇”)于合肥工業(yè)大學(xué)智能制造技術(shù)研究院成功舉辦。 本期2022機(jī)器人操作系統(tǒng)(ROS)暑期學(xué)校暨人工智能
2022-08-11 15:31:03804 
ROS全稱Robot Operating System,直接翻譯就是機(jī)器人操作系統(tǒng)。雖然名字里含有“操作系統(tǒng)”的字眼,但ROS與Windows和Linux等操作系統(tǒng)不一樣,它實際上是一套軟件庫和工具
2022-10-28 15:39:56664 近來找到的實習(xí)主要是做智能車控制,用到的也就是ROS機(jī)器人操作系統(tǒng),ROS需要運(yùn)行在一個操作系統(tǒng)上,這個操作系統(tǒng)常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS組合就是實習(xí)的主要學(xué)習(xí)內(nèi)容了。所以我就新開了一個坑,網(wǎng)絡(luò)上ROS的資源很豐富,我在此只是用以分享學(xué)習(xí)筆記。
2023-05-19 17:07:413769 
機(jī)器人操作系統(tǒng)(Robot operating system ,ROS)是一個應(yīng)用于機(jī)器人上的基礎(chǔ)框架,它把原本松散的零部件耦合在一起,提供通信的架構(gòu),近似上ROS是一個中間件。
ros上手簡單適合研究,但是商用缺點(diǎn)明顯。主要是實時通信性能有限,系統(tǒng)穩(wěn)定差。
2023-05-19 17:20:51530 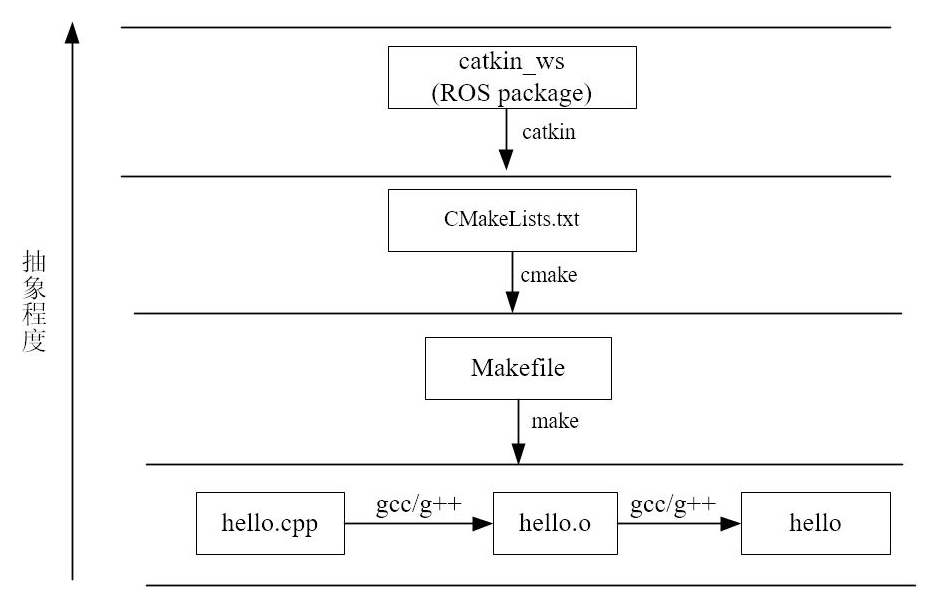
機(jī)器人操作系統(tǒng)(Robot operating system ,ROS)是一個應(yīng)用于機(jī)器人上的基礎(chǔ)框架,它把原本松散的零部件耦合在一起,提供通信的架構(gòu),近似上ROS是一個中間件。
ros上手簡單適合研究,但是商用缺點(diǎn)明顯。主要是實時通信性能有限,系統(tǒng)穩(wěn)定差。
2023-05-19 17:21:18380 本文介紹ROS機(jī)器人操作系統(tǒng)(Robot Operating System)的實現(xiàn)原理,從最底層分析ROS代碼是如何實現(xiàn)的。
**1、序列化**
把通信的內(nèi)容(也就是消息message)序列化是通信的基礎(chǔ),所以我們先研究序列化。
2023-05-19 17:41:47732 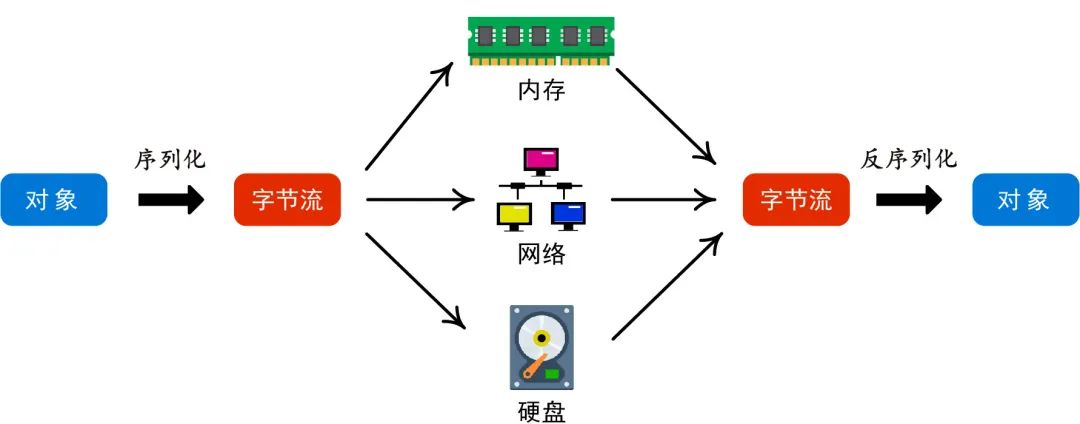
本文介紹ROS機(jī)器人操作系統(tǒng)(Robot Operating System)的實現(xiàn)原理,從最底層分析ROS代碼是如何實現(xiàn)的。
**1、序列化**
把通信的內(nèi)容(也就是消息message)序列化是通信的基礎(chǔ),所以我們先研究序列化。
2023-05-19 17:42:01805 可能很多初學(xué)者聽到機(jī)器人操作系統(tǒng),就被“操作系統(tǒng)”幾個字嚇住了。其實簡單點(diǎn)說,**ROS就是一個分布式的通信框架,幫助程序進(jìn)程之間更方便地通信。
2023-05-19 17:46:401453 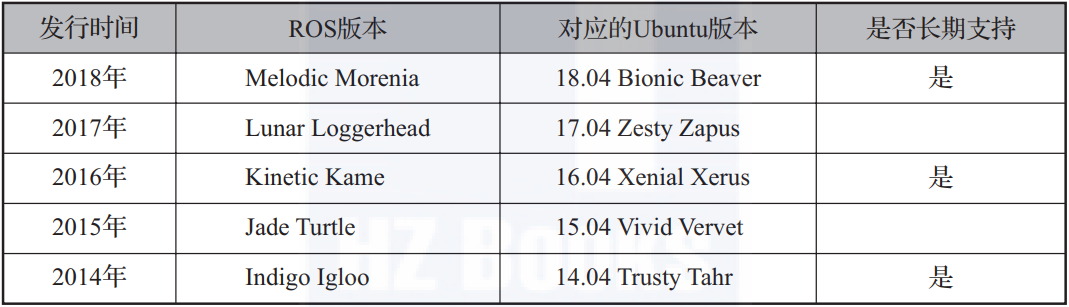
。以Ubuntu操作系統(tǒng)安裝和使用為起點(diǎn),依次介紹了ROS安裝、實體/仿真機(jī)器人搭建、機(jī)器視覺、SLAM建圖、導(dǎo)航、多機(jī)器人系統(tǒng)等知識,最終引導(dǎo)讀者獨(dú)立完成機(jī)器人應(yīng)用開發(fā)的任務(wù)
2023-03-03 14:53:46783 
電子發(fā)燒友網(wǎng)站提供《一個機(jī)器人操作系統(tǒng)(ROS)節(jié)點(diǎn)系統(tǒng).zip》資料免費(fèi)下載
2023-07-06 10:49:240 與ROS1不同的是,ROS2誕生的目的就是為了讓更多機(jī)器人使用,所以在設(shè)計上更加符合技術(shù)的發(fā)展方向,也運(yùn)用了很多最近的技術(shù)框架。
2024-01-02 12:28:40222 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論