基于ORB和LATCH相結(jié)合的特征檢測與描述算法
大小:0.77 MB 人氣:0 2017-12-01 需要積分:1


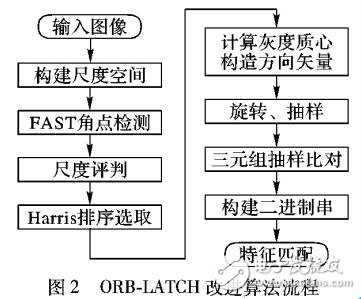
針對基于學(xué)習(xí)安排的三元組( LATCH)二進制描述子不具備尺度不變性且其旋轉(zhuǎn)不變性,需要特征檢測子輔助的問題,提出了一種基于快速定向旋轉(zhuǎn)二進制穩(wěn)健基元獨立特征( ORB)和LATCH相結(jié)合的特征檢測與描述算法。首先,在圖像金字塔尺度空間上進行加速段測試特征( FAST)檢測;然后,采用ORB灰度質(zhì)心方法來進行方向補償;最后,對特征進行LATCH描述。實驗結(jié)果表明,所提算法具備運算量小、實時性高以及旋轉(zhuǎn)和尺度不變性的特點,在相同的準確率下,其召回率優(yōu)于ORB和哈里斯-LATCH( HARRIS-LATCH)算法,其匹配內(nèi)點率比ORB算法提高了4.2個百分點。該算法在保持實時性的同時進一步縮小了與基于直方圖的尺度不變特征變換(SIFT)和加速健壯特征( SURF)算法之間的精度差距,可對圖像序列進行快速且精確的實時處理。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
基于ORB和LATCH相結(jié)合的特征檢測與描述算法下載
相關(guān)電子資料下載
- OpenCV攜Orbbec 3D相機亮相CVPR 2024,加速AI視覺創(chuàng)新 291
- Element Six與Orbray同盟致力于頂尖晶圓級單晶(SC)制造 356
- 羅克韋爾通過增強型ArmorBlock 5000 IO-Link主模塊提高自動化效率 116
- 適合單片機裸機的開源軟件框架:Zorb 396
- 工程實踐中VINS與ORB-SLAM的優(yōu)劣分析 1279
- 時序電路為什么在FPGA上綜合成了latch? 408
- 一起聊聊faro orbis-它的商業(yè)價值有哪些 189
- FARO Orbis移動激光掃描助力林業(yè)數(shù)字化轉(zhuǎn)型,實現(xiàn)智能森林 244
- 適合單片機裸機的開源軟件框架:Zorb 631
- ORB-SLAM3整體結(jié)構(gòu)框架分析 748