基于Kinect深度圖預處理
大小:0.91 MB 人氣:0 2017-12-25 需要積分:3


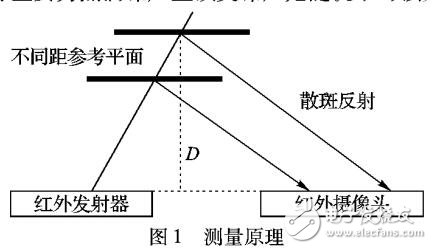
針對應用在機器人三維(3D)場景感知測量中,Kinect深度圖的聯合雙邊濾波(JBF)存在降低原始場景深度信息精確度的制約性問題,提出一種新的預處理算法。首先,通過構建深度圖的測量和采樣模型,得到深度圖的蒙特卡羅不確定度評價模型;其次,依據該模型計算得到深度值估計區間,實現噪聲點與非噪聲點的判定及濾除;最后,利用估計區間均值完成噪聲點的修復。實驗結果表明,該算法在噪聲濾波的同時保證了非噪聲的不變性;非噪聲的不變性以及基于估計均值的噪聲修復使原始深度梯度具有不變性;與聯合彩色深度圖的雙邊濾波相比,預處理結果圖物體邊緣輪廓清晰不變且其均方誤差降低了15. 25% - 28. 79%。因此,該預處理算法達到了提高三維場景深度信息精確度的目的。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
基于Kinect深度圖預處理下載
相關電子資料下載
- 特征工程與數據預處理全解析:基礎技術和代碼示例 90
- 信號的預處理包括哪些環節 562
- 常見的醫學圖像讀取方式和預處理方法 340
- 利用氨等離子體預處理進行無縫間隙fll工藝的生長抑制 173
- C預處理器及其工作原理 325
- 可片上探測和預處理的仿生視聽光電探測器 166
- C語言中的預處理器 422
- 可片上探測和預處理的仿生視聽光電探測器制造 568
- 數據預處理和特征工程的常用功能 388
- 融合Azure Kinect技術,奧比中光Femto Mega接入Mac生態 399