二維網(wǎng)格的室內(nèi)匹配定位算法
大小:0.76 MB 人氣: 2018-01-29 需要積分:2
推薦 + 挑錯(cuò) + 收藏(0) + 用戶評(píng)論(0)
標(biāo)簽:定位算法(14919)
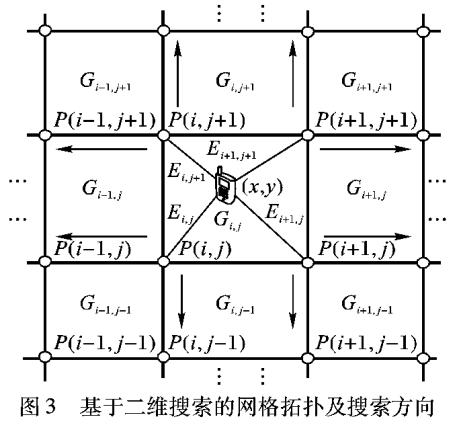
針對(duì)接收信號(hào)強(qiáng)度值( RSSI)的時(shí)變特性降低定位精度的問(wèn)題,提出了一種基于二維網(wǎng)格特征參數(shù)融合的室內(nèi)匹配定位算法。該算法融合RSSI和信號(hào)到達(dá)時(shí)間差(TDOA)構(gòu)建網(wǎng)格特征參數(shù)模型,基于二維網(wǎng)格快速搜索策略降低匹配定位的計(jì)算量,采用網(wǎng)格特征向量的歸一化歐氏距離進(jìn)行最優(yōu)網(wǎng)格匹配定位,最終由匹配網(wǎng)格的參考節(jié)點(diǎn)計(jì)算終端的精確位置。定位仿真實(shí)驗(yàn)中,該算法在3m網(wǎng)格粒度下的定位均方根誤差為1.079 m,平均定位誤差小于1. 865 m;3 m定位精度下的概率達(dá)到94. 7%,相對(duì)于傳統(tǒng)單- RSSI模型法提高了19. 6%。所提算法能夠有效提高室內(nèi)定位精度,同時(shí)減少搜索數(shù)據(jù)量,降低匹配定位的計(jì)算復(fù)雜度。
非常好我支持^.^
(0) 0%
不好我反對(duì)
(0) 0%
下載地址
二維網(wǎng)格的室內(nèi)匹配定位算法下載
相關(guān)電子資料下載
- 藍(lán)牙信標(biāo)室內(nèi)定位算法如何確定 A,n 值 284
- 目前的室內(nèi)定位算法有什么優(yōu)勢(shì) 434
- 【大大芯方案】高精度實(shí)時(shí)定位,大聯(lián)大推出基于NXP UWB 3D定位算法與上位機(jī)方 864
- UWB定位算法介紹 600
- 基于平面投影的單目視覺(jué)AGV定位算法 758
- 基于自動(dòng)駕駛車(chē)輛新型的視覺(jué)語(yǔ)義定位算法 616
- 卡爾曼濾波器原理分析 751
- 卡爾曼濾波器基礎(chǔ)預(yù)測(cè)定位算法原理解析 1200
- 基礎(chǔ)卡爾曼濾波 457
- UWB的定位算法簡(jiǎn)單介紹 2943