微弱GPS信號的數(shù)據(jù)位翻轉(zhuǎn)預(yù)估算法
推薦 + 挑錯(cuò) + 收藏(0) + 用戶評論(0)


全球定位系統(tǒng)( Global Positioning System,CPS)衛(wèi)星信號包括載波、偽碼和數(shù)據(jù)碼三個(gè)信號層次。CPS接收機(jī)接收到衛(wèi)星信號后,要將經(jīng)過載波解調(diào)后的中頻信號與接收機(jī)內(nèi)部產(chǎn)生的C/A碼進(jìn)行相關(guān)運(yùn)算,利用C/A碼的正交性解調(diào)中頻信號,使信號頻寬變回到只含數(shù)據(jù)碼的基帶,這個(gè)過程就稱為捕獲。捕獲是CPS接收機(jī)進(jìn)行導(dǎo)航和定位的關(guān)鍵步驟。在實(shí)際應(yīng)用環(huán)境中,衛(wèi)星信號到達(dá)地面時(shí)其功率為- 130 dBm左右,此時(shí)信噪比( Signal-to-Noise Ratio.SNR)為- 20 dB左右,然而在森林遮擋、室內(nèi)等弱信號環(huán)境下,普通的GPS接收機(jī)很難捕獲到信號,無法實(shí)現(xiàn)定位功能。為此,研制具有弱信號捕獲能力的高靈敏度GPS軟件接收機(jī)越來越有必要。
通用的GPS弱信號的捕獲方法是通過延長相干積分時(shí)間來提高信噪比增益,但是受50 b/s導(dǎo)航數(shù)據(jù)的影響,相干積分時(shí)間一般不能超過20 ms,且要盡量避免導(dǎo)航數(shù)據(jù)位翻轉(zhuǎn)造成的誤捕獲。
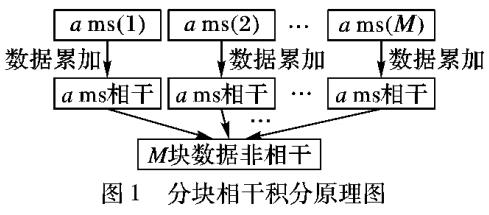
微弱全球定位系統(tǒng)( GPS)衛(wèi)星信號的捕獲需要較長的積分時(shí)間,但受導(dǎo)航數(shù)據(jù)位翻轉(zhuǎn)的影響,一般采用10 ms的相干積分。為進(jìn)一步提高捕獲靈敏度,提出了一種數(shù)據(jù)位翻轉(zhuǎn)預(yù)估算法,該算法通過對多組信號積分結(jié)果的對比估算出翻轉(zhuǎn)位的位置,舍棄存在位翻轉(zhuǎn)的5 ms數(shù)據(jù)從而消除其影響,并對其余數(shù)據(jù)進(jìn)行15 ms的分塊相干積分。同時(shí),為降低分塊相干積分中非相干積分的平方損耗,采用差分相干積分對其進(jìn)行改進(jìn),并在運(yùn)算過程中采用“先累加后相關(guān)”的方式,在進(jìn)一步提高捕獲靈敏度的同時(shí)降低運(yùn)算復(fù)雜度。仿真結(jié)果表明,該算法能高效地捕獲到信噪比低至-50 dB的信號,可有效地提高CPS接收機(jī)的捕獲靈敏度和捕獲效率。
非常好我支持^.^
(2) 50%
不好我反對
(2) 50%
下載地址
微弱GPS信號的數(shù)據(jù)位翻轉(zhuǎn)預(yù)估算法下載
相關(guān)電子資料下載
- 5分鐘讀懂GPS-RTK實(shí)時(shí)動(dòng)態(tài)技術(shù),建議收藏! 118
- 抗干擾強(qiáng)、低功耗、高精度多模衛(wèi)星定位技術(shù)——為您帶來全新的精準(zhǔn)體驗(yàn) 178
- 智慧醫(yī)療——衛(wèi)星同步時(shí)鐘在某婦幼保健院的對時(shí)方案 86
- 車載車庫GPS信號屏蔽器:如何確保您的車輛安全 83
- 中科微ATGM332D-5T:BDS、GNSS全星座定位授時(shí)模塊 129
- 中科微ATGM336H定位模塊的數(shù)據(jù)手冊解讀 203
- 兆越打造 | GPS/北斗高精度時(shí)間同步網(wǎng)絡(luò)方案 314
- 車載車庫GPS信號探測器:讓你“無處不導(dǎo)” 100
- 同步時(shí)鐘:北斗/GPS衛(wèi)星、電信基站、NTP以太網(wǎng)校時(shí)方式的區(qū)別 144
- 安徽京準(zhǔn) GPS北斗衛(wèi)星時(shí)鐘同步裝置:守護(hù)全球精確時(shí)鐘 137