基于平面投影的三維空間定位算法
大小:1.08 MB 人氣: 2018-03-12 需要積分:2
標簽:定位算法(14919)
無線傳感器網(wǎng)絡( Wireless Sensor Network,WSN)可以實現(xiàn)復雜的大規(guī)模監(jiān)測和追蹤任務,而節(jié)點定位技術(shù)是無線傳感器網(wǎng)絡的主要支撐技術(shù)之一。目前一般通過獲得節(jié)點間的距離或者角度信息來對未知節(jié)點進行定位,因此,將定位算法分為基于距離的定位算法以及距離無關(guān)的定位算法。
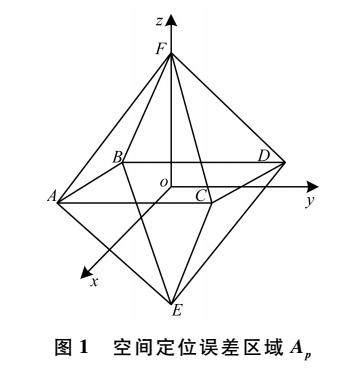
在無線傳感器網(wǎng)絡的節(jié)點定位過程中,未知節(jié)點在x軸和y軸方向上的定位精度較z軸更重要。為此,在RSSI高斯混合(RGM)算法的基礎(chǔ)上提出一種基于平面投影的定位算法。通過縮小未知節(jié)點空間定位誤差區(qū)域在X0Y平面上的投影面積,提高未知節(jié)點在石軸和y軸方向上的定位精度。仿真結(jié)果表明,與RGM算法相比,該算法可在不增加時間復雜度及網(wǎng)絡通信量的基礎(chǔ)上,有效提高節(jié)點的x軸和y軸定位精度。
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
下載地址
基于平面投影的三維空間定位算法下載
相關(guān)電子資料下載
- 藍牙信標室內(nèi)定位算法如何確定 A,n 值 284
- 目前的室內(nèi)定位算法有什么優(yōu)勢 434
- 【大大芯方案】高精度實時定位,大聯(lián)大推出基于NXP UWB 3D定位算法與上位機方 864
- UWB定位算法介紹 600
- 基于平面投影的單目視覺AGV定位算法 758
- 基于自動駕駛車輛新型的視覺語義定位算法 616
- 卡爾曼濾波器原理分析 751
- 卡爾曼濾波器基礎(chǔ)預測定位算法原理解析 1200
- 基礎(chǔ)卡爾曼濾波 457
- UWB的定位算法簡單介紹 2943