") 機(jī)器人和信息系統(tǒng)的融合
機(jī)器人和信息系統(tǒng)的融合
無論是德國提出的工業(yè) 4.0參考架構(gòu)(RAMI 4.0),還是美國提出的工業(yè)互聯(lián)網(wǎng)參考架構(gòu)(IIRA),均強(qiáng)化了機(jī)器/設(shè)備與控制/信息系統(tǒng)之間的網(wǎng)絡(luò)連接的互操作性、高級數(shù)據(jù)分析與信息安全方面的功能,從而為智能制造提供信息感知、傳輸、分析、反饋、控制支撐。
從數(shù)據(jù)/信息/知識/智慧的DIKW金字塔模型而言,因?yàn)閿?shù)據(jù)都來自于機(jī)器/設(shè)備層,沒有數(shù)據(jù),則任何工業(yè)互聯(lián)網(wǎng)平臺或者人工智能算法都會成為無源之水。因此,對于機(jī)器人行業(yè)來說,技術(shù)趨勢之一是通過采用最新的ICT技術(shù),強(qiáng)化機(jī)器人(OT)和信息系統(tǒng)(IT)之間的融合。
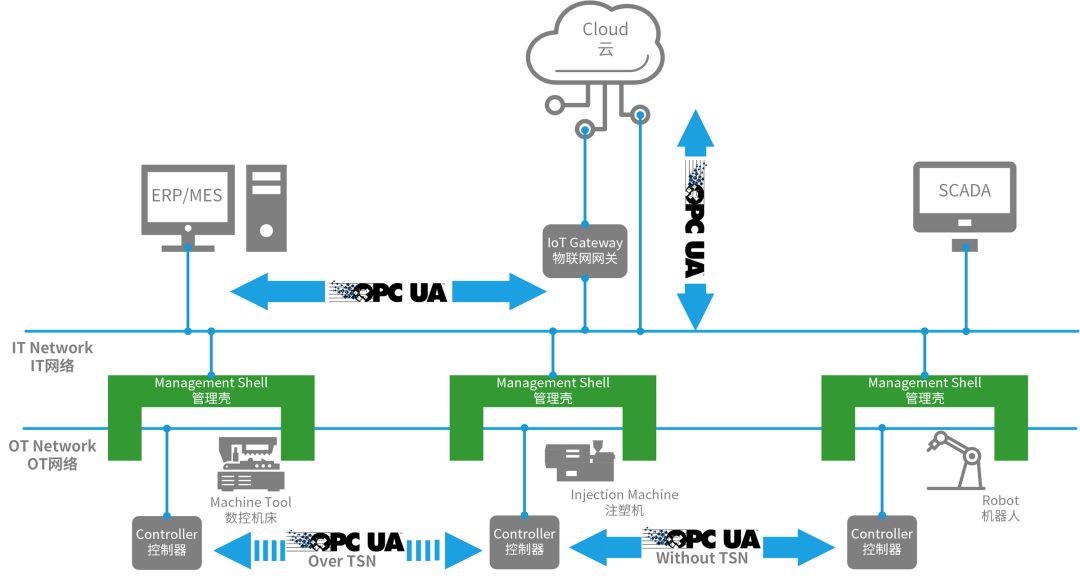
圖1 :機(jī)器人+信息系統(tǒng)
目前,M2M通信一般采用IEC 61158標(biāo)準(zhǔn)的各種現(xiàn)場總線,但因?yàn)闅v史以及商業(yè)方面的原因,IEC 61158標(biāo)準(zhǔn)化了19種現(xiàn)場總線,而這些現(xiàn)場總線的硬件接口以及物理層/應(yīng)用層均不完全相同,除非采用同一廠家(協(xié)議標(biāo)準(zhǔn))的產(chǎn)品,否則在現(xiàn)場無法做到互聯(lián)互通。
從這種現(xiàn)實(shí)困境來說,過多的標(biāo)準(zhǔn)等同于沒有標(biāo)準(zhǔn)。時(shí)間敏感網(wǎng)絡(luò)(TSN)是IEEE 802.1下面的一個(gè)工作組,通過在數(shù)據(jù)鏈路層引入新的時(shí)間同步方面的協(xié)議,解決標(biāo)準(zhǔn)的以太網(wǎng)因?yàn)榉谴_定實(shí)時(shí)傳輸導(dǎo)致無法在工業(yè)現(xiàn)場使用的問題。
從另一個(gè)層面而言,為應(yīng)對設(shè)備層之間(水平集成)和設(shè)備-云端之間(垂直集成)即插即用的挑戰(zhàn),在通信層/信息層會使用獨(dú)立于平臺和供應(yīng)商、集成式地址空間和信息模型、面向服務(wù)架構(gòu)(SOA)的OPC UA規(guī)范。
機(jī)器人和信息系統(tǒng)的融合會給一些新商業(yè)模式提供條件,比如目前主流的機(jī)器人維護(hù)模式還是定期巡檢的方式,通過對機(jī)器人上傳到云端的數(shù)據(jù)進(jìn)行存儲和分析,可以從網(wǎng)關(guān)供應(yīng)商轉(zhuǎn)向預(yù)測性維護(hù)服務(wù)提供商;又比如通過對物流機(jī)器人運(yùn)行數(shù)據(jù)的存儲和分析,可以從物流行業(yè)機(jī)器人供應(yīng)商(提供機(jī)器人集成解決方案)轉(zhuǎn)向物流服務(wù)(按照搬運(yùn)包裹的使用量計(jì)費(fèi))提供商。
圖2 :制造業(yè)的服務(wù)化轉(zhuǎn)
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28387瀏覽量
206921 -
信息系統(tǒng)
+關(guān)注
關(guān)注
0文章
205瀏覽量
20437
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識與基礎(chǔ)模塊
【書籍評測活動(dòng)NO.51】具身智能機(jī)器人系統(tǒng) | 了解AI的下一個(gè)浪潮!
智能移動(dòng)機(jī)器人

東軟在中國醫(yī)保信息系統(tǒng)市場持續(xù)保持行業(yè)領(lǐng)先優(yōu)勢
柔性機(jī)器人和剛性機(jī)器人有什么區(qū)別?

工業(yè)機(jī)器人和機(jī)械臂的設(shè)計(jì)、功能和應(yīng)用有哪些區(qū)別?
柔性機(jī)器人與剛性機(jī)器人區(qū)別與聯(lián)系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論