 簡易太陽能跟蹤器制作教程
簡易太陽能跟蹤器制作教程
太陽能裝置通常使用固定太陽能電池板,它們的位置可以產生盡可能多的電力。然而,這些最佳位置僅在太陽處于特定位置時才是好的,并且如果太陽落在該最佳位置之外,則面板不再有效地工作。這就是為什么有些裝置使用跟蹤太陽能電池板,這使得電池板朝向太陽,以確保它們始終以最佳性能運行。在這個DIY Hacking項目中,我們將制作一個簡單的太陽能跟蹤器來做到這一點!
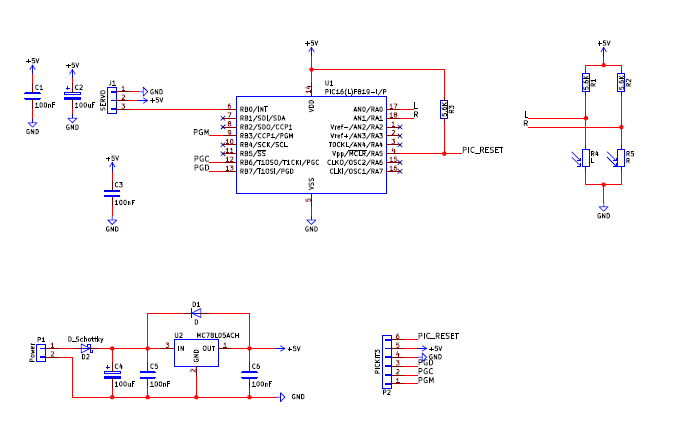
原理圖
太陽能電池板跟蹤系統如何工作
太陽能電池板跟蹤系統項目有兩個主要組成部分:
電路板
微控制器固件
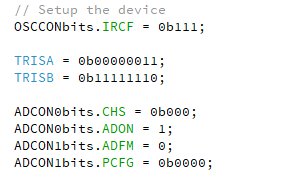
電路本身非常簡單,只有一些部分:伺服連接,微控制器,兩個LDR傳感器和一個簡單的電源管理電路。兩個LDR并排放置在管中,安裝在太陽能電池板上,并指向與太陽能電池板相同的方向。 通過PIC16F819上的固件實現電路的功能,PIC16F819可處理傳感器讀數和電機調整。當PIC導通時,它通過配置振蕩器,配置IO端口和設置ADC模塊來啟動,因此所有PORTA都是具有左對齊結果的模擬輸入。
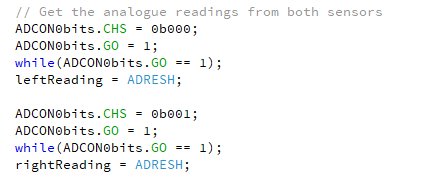
初始配置完成后,PIC啟動主無限循環。微控制器的第一項任務是從兩個傳感器獲取讀數。這可以通過正確調整ADC通道選擇,啟動ADC進行測量,然后將結果放入適當的變量來完成。
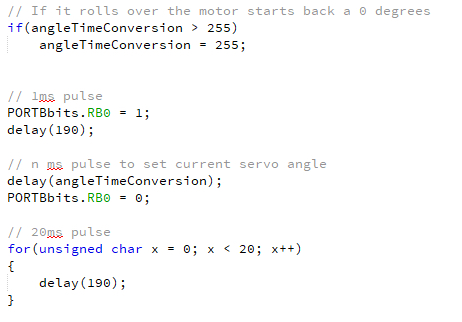
通過兩次測量,是時候確定移動跟蹤器的方法了。如果左側傳感器檢測到的光線比右側傳感器多,則該裝置需要逆時針(向左)轉動。如果右側傳感器檢測到左側傳感器的光線較多,則該裝置需要順時針轉動(向右)。如果兩個傳感器相同,則設備處于最佳位置。一旦調整了請求的角度,就需要對其進行消毒,這是通過范圍檢查完成的(低于0或大于60是TG9e伺服的無效角度)。最后要做的是將角度轉換為時間延遲。這是通過convertAngle()完成的,并且此函數返回一個數字,當輸入delay()時,將導致伺服將正確響應的時間延遲。

完成角度轉換后,可以將伺服轉到正確的位置。伺服系統的脈沖長度在1ms到2ms之間變化。脈沖長度1m是最小長度并且代表0度,而2ms代表最大旋轉角度(對于我使用的伺服,它是60度)。第一個延遲開啟伺服端口1ms(默認值),第二個延遲使端口保持開啟角度位置時間(angleTimeConversion)。
該項目中的電路可以使用許多不同的技術構建,包括條形板,面包板,矩陣板和PCB。對于這個項目,我使用了PCB,因為它比有線電路更容易構建,因為我現在使用SOT-89封裝的7805 IC。太陽能跟蹤器本身可以使用許多不同的機械套件構建,包括Lego和Knex,但這里使用的伺服具有足夠的扭矩,可以將太陽能電池板直接安裝到面板上,然后安裝到伺服電機上。
主PCB
PCB的底面
太陽能跟蹤器完成
伺服電機
LDR傳感器
可下載文件
太陽能電池板跟蹤系統文件
-
太陽能
+關注
關注
37文章
3405瀏覽量
114191 -
跟蹤器
+關注
關注
0文章
131瀏覽量
20026
發布評論請先 登錄
相關推薦
太陽能逆變器技術面臨的挑戰
太陽能模擬器:太陽能研究與應用的得力助手


光學跟蹤器信號源手機怎么設置
Genius Tracker? 安裝速度遠超競爭對手的單軸跟蹤器
Lab Companion太陽能模組試驗
太陽能發電原理及工作過程 太陽能發電原理是光電效應嗎
用于改善太陽能系統的傾角儀傳感器

太陽能電池工作原理 太陽能電池與鋰電池的區別
Wi-SUN 可最大限度地提高太陽能跟蹤器的性能






 工商網監
工商網監
評論