 如何將紅外傳感器與樹莓派連接
如何將紅外傳感器與樹莓派連接
概述
紅外線傳感器或紅外線傳感器是電子愛好者和制造商常用的傳感器模塊之一。它們通常用作障礙物檢測傳感器或接近傳感器。
IR傳感器也用于非接觸式數字轉速計。實施紅外傳感器的其他一些應用是線路跟隨器機器人,障礙避免機器人,避免機器人邊緣等等。
關于紅外傳感器(紅外接近傳感器)的簡要說明
紅外傳感器發射和接收紅外輻射。它們通常用作接近傳感器,即如果物體靠近傳感器則檢測并報警。
讓我通過提供兩個真實的應用程序來幫助您更好地了解IR傳感器紅外傳感器。第一個是移動電話。
現在幾乎所有移動電話都有紅外傳感器。通常,它們將被放置在手機上的聽筒附近。
當用戶撥打或接聽電話時,紅外傳感器會檢測到手機離用戶耳朵的距離。如果它靠近耳朵,手機的顯示屏將被關閉,以免您意外觸摸屏幕上的任何內容。
另一個重要的應用是汽車。所有現代汽車都配備了倒車停車傳感器,可以感知您可以在多大程度上扭轉汽車而不會碰到任何東西。這些反向傳感器使用紅外傳感器實現。
紅外傳感器模塊基本上由三部分組成:紅外發射器,紅外探測器和控制電路。
通常,紅外LED用作紅外發射器,光電二極管或光電晶體管(較少使用)用作紅外線探測器。控制電路由帶有必要元件的比較器IC組成。
根據應用和要求,IR傳感器可以通過兩種方式實現。在第一種方法中,IR發射器和IR探測器并排放置。在第二種設置中,紅外發射器和紅外探測器彼此相對放置。
第一種實施方式稱為反射型紅外傳感器。在此設置中,紅外發射器連續發射紅外光,如果傳感器前面有任何障礙物/物體,紅外光會撞擊物體并反彈回來。紅外探測器捕獲反射信號,控制電路將在其輸出上反映邏輯高電平。
第二種實施方式,紅外發射器和探測器位于face-t-face,被稱為透射型紅外傳感器。在這里,來自紅外發射器的紅外光總是落在探測器上。
如果發射器和探測器之間有物體,那么紅外線就會受阻燈和控制電路將檢測到這一點并產生適當的輸出。
本項目中使用的紅外傳感器是反射型紅外傳感器。您可以輕松地將這種類型的紅外傳感器構建為DIY項目,因為電路非常簡單。
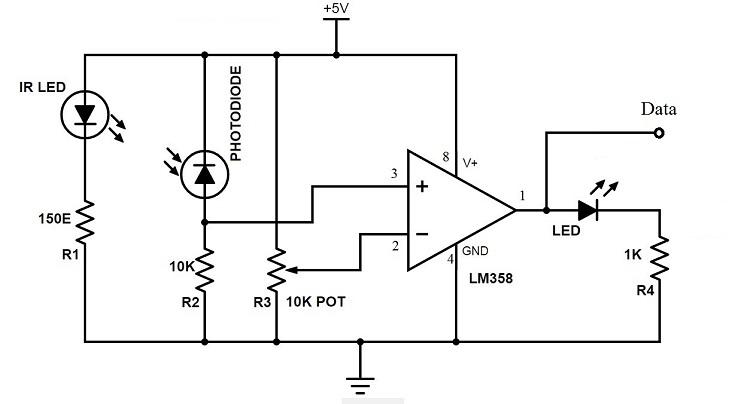
紅外傳感器模塊示意圖
下圖顯示紅外線電路圖傳感器模塊。它由以下組件組成。
紅外LED
光電二極管
150Ω電阻器
10KΩ電阻器
10KΩ電位器
LM358
LED
1KΩ電阻
現在我們已經了解了紅外傳感器模塊及其連接,我們將繼續使用Raspberry Pi連接IR傳感器。
Raspberry Pi紅外傳感器接口可以轉換為接近檢測器,應用程序將檢測對象是否太靠近傳感器。
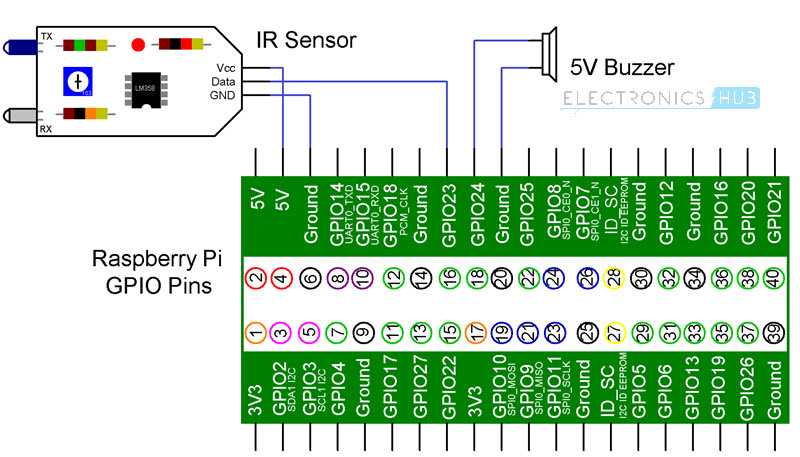
電路圖
下圖顯示了使用Raspberry連接紅外傳感器的連接圖皮。您已經看過IR傳感器模塊的電路圖。
所需組件
Raspberry Pi 3 B型
紅外傳感器
5V蜂鳴器
迷你面包板
連接電線
電源供應
計算機
紅外傳感器模塊只有三個引腳:VCC,GND和數據。將IR傳感器的VCC和GND引腳連接到Raspberry Pi的+ 5V和GND引腳。
然后將IR傳感器的Data引腳連接到GPIO23,即物理引腳16 Raspberry Pi。
為了表示鬧鐘,我使用了一個簡單的5V蜂鳴器。將蜂鳴器的一個端子連接到Raspberry Pi的GND,另一個端子(通常標記為+)連接到GPIO24,即Raspberry Pi的物理引腳18。
代碼
以下是IR Sensor與Raspberry Pi接口的代碼。它是用Python編寫的。
工作
我們已經學會了如何連接IR傳感器與Raspberry Pi。我現在將解釋項目的工作情況。
所有的魔力都發生在紅外傳感器模塊中。由于它是反射型紅外傳感器,每當物體放置在傳感器前面時,來自紅外LED的紅外光在撞擊物體后會反射回來并落在光電二極管上。
然后光電二極管開始導通。因此,LM358的同相輸入端的電壓將大于反相輸入端的電壓。
由于LM358作為比較器,其輸出將變為高電平,板載LED發光。 Raspberry Pi檢測到數據引腳上的HIGH,它會激活蜂鳴器。
使用10KΩ電位計,您可以調整物體放在前面的距離的傳感器,以便檢測。
應用程序
如前面部分所述,接近傳感器或障礙物檢測是紅外傳感器與Raspberry Pi接口的主要應用。一些常見的應用包括:
非接觸式轉速計
線跟隨器機器人
障礙避免機器人
汽車倒車雷達
移動接近傳感器
-
紅外傳感器
+關注
關注
9文章
519瀏覽量
47559 -
樹莓派
+關注
關注
116文章
1706瀏覽量
105607
發布評論請先 登錄
相關推薦
樹莓派傳感器使用方法 樹莓派 Raspberry Pi 4優缺點
紅外傳感器的工作原理及應用
紅外傳感器和超聲波傳感器有什么區別
人體紅外傳感器輸出信號有哪些
人體紅外傳感器的數據屬于什么量
人體紅外傳感器的作用是什么
人體紅外傳感器能穿透玻璃嗎為什么
紅外傳感器電路圖 紅外傳感器的工作原理和應用
光電傳感器/紅外傳感器
熱釋電紅外傳感器的原理
海關機場采用人體紅外傳感器解決安保問題

紅外傳感器種類及功能
紅外傳感器的應用場景有哪些
淺談噪聲源引入對紅外傳感器性能的影響






 工商網監
工商網監
評論