 編碼器與計數模塊的連接和編程介紹
編碼器與計數模塊的連接和編程介紹
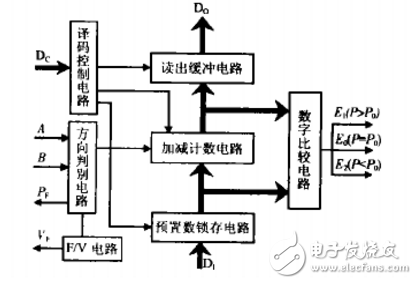
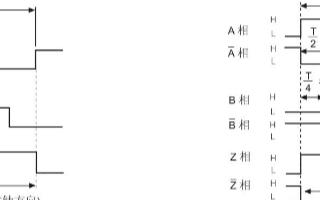
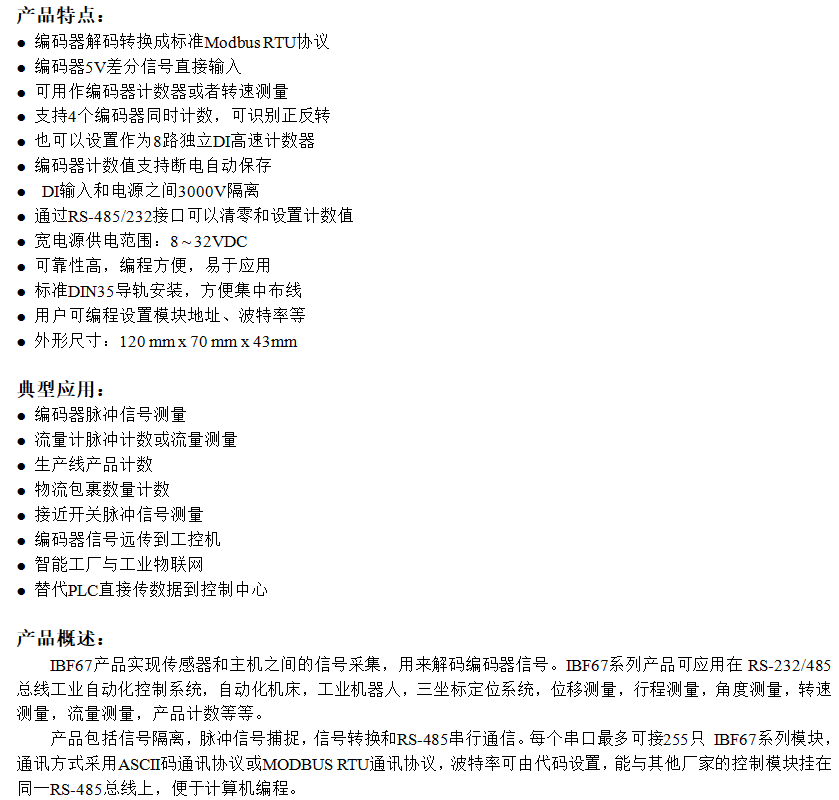
增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90。,從而可方便的判斷出旋轉方向,而Z相為每轉一個脈沖,用于基準點定位。它的優點是原理構造簡單,機械平均壽命可在幾萬小時以上,抗干擾能力強,可靠性高,適合于長距離傳輸。其缺點是無法輸出軸轉動的絕對位置信息。
FM450-1高速計數模塊的端子配置與增量型編碼器的接線
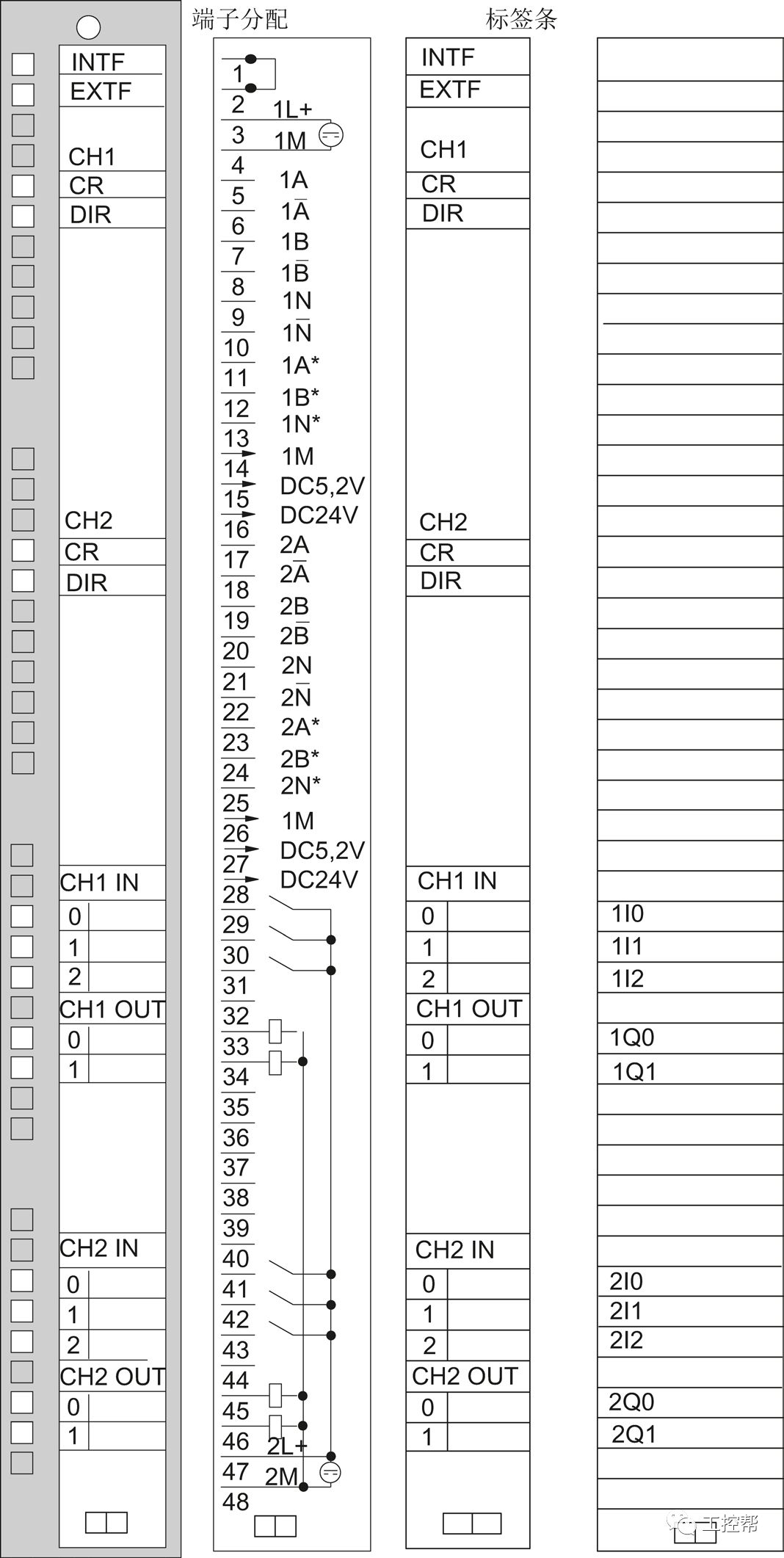
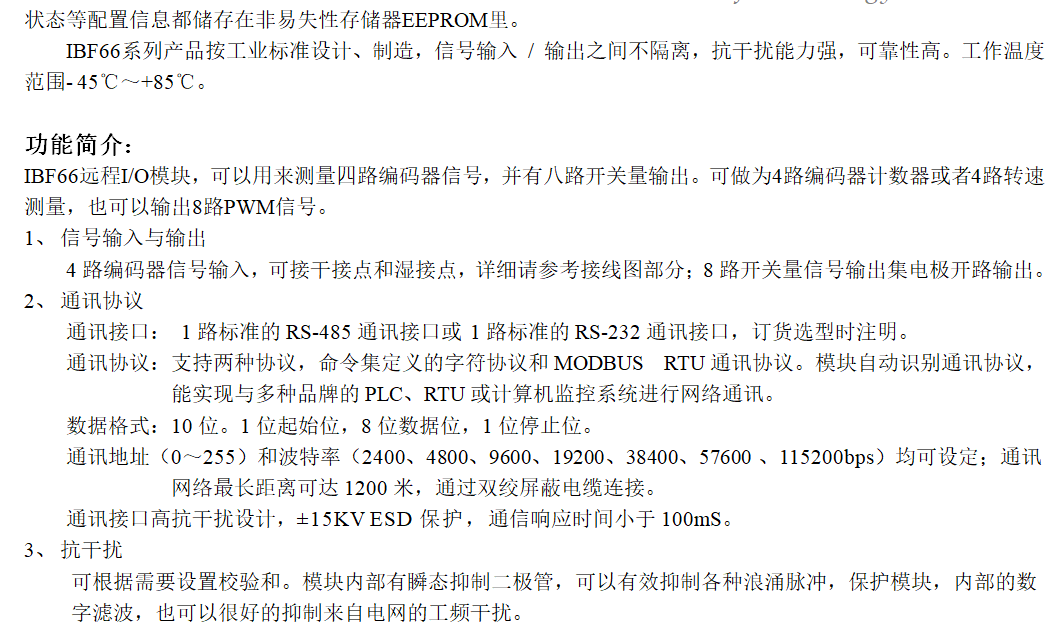
要使用該電壓為5 V 和 24 V 編碼器供電,必須將24 DC V 連接至 1L+ 和 1M 端子。
集成二極管可保護模塊免受輔助電壓反極性的影響。
模塊可監視輔助電壓是否已連接。
5 V 編碼器信號 A 和 /A 、 B 和 /B 、 N 和 /N
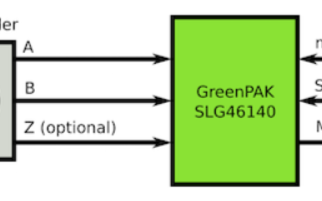
可以按照RS422 連接具有 5 V 差分信號的增量編碼器,即具有差分信號 A 和 /A、B 和
/B、N 和 /N 的增量編碼器。
A 和 /A、B 和 /B、N 和 /N 信號可通過相應標記的端子進行連接
僅當您希望將計數器設置為編碼器的零標記時,才連接信號N 和 /N 。
輸入不與S7-400 總線電隔離。按照5V供電為例,編碼器的接線如圖所示:AB為兩相相位差,確定編碼器的旋轉方向。

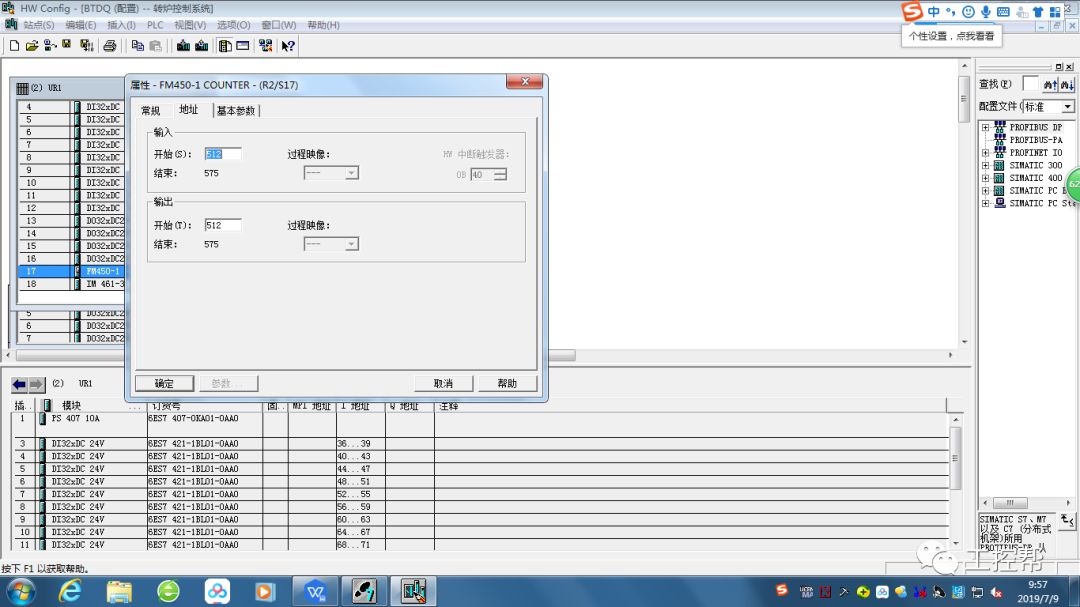
FM450-1高速計數模塊的地址如圖:
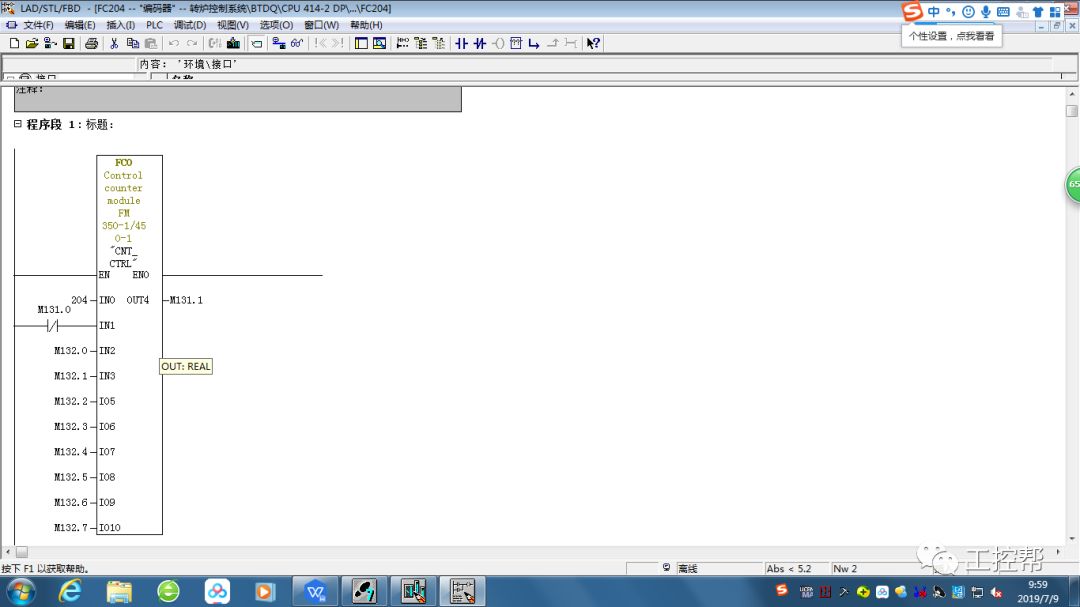
程序的編寫
新建DB數據塊,FC CNT_CTRL 所需的數據存儲在 CPU 上的 DB 中。FC CNT_CTRL
循環地傳送數據從該DB 到 FM,并從 FM 取回數據。與模塊中某個通道相關的所有數據都在 FC CNT_CTRL 的 DB 中。DB 數據結構和長度由
FC CNT_CTRL 中的變量聲明來確定。在配置模塊之前,DB
必須為其分配以下有效數據。
● 模塊地址(地址 6.0)
● 通道起始地址(地址 8.0)
● 用戶數據長度(地址 12.0)
● 當前裝載或鎖存值(地址30.0)
● 當前計數值(地址34.0)
梯形圖程序編寫如下:
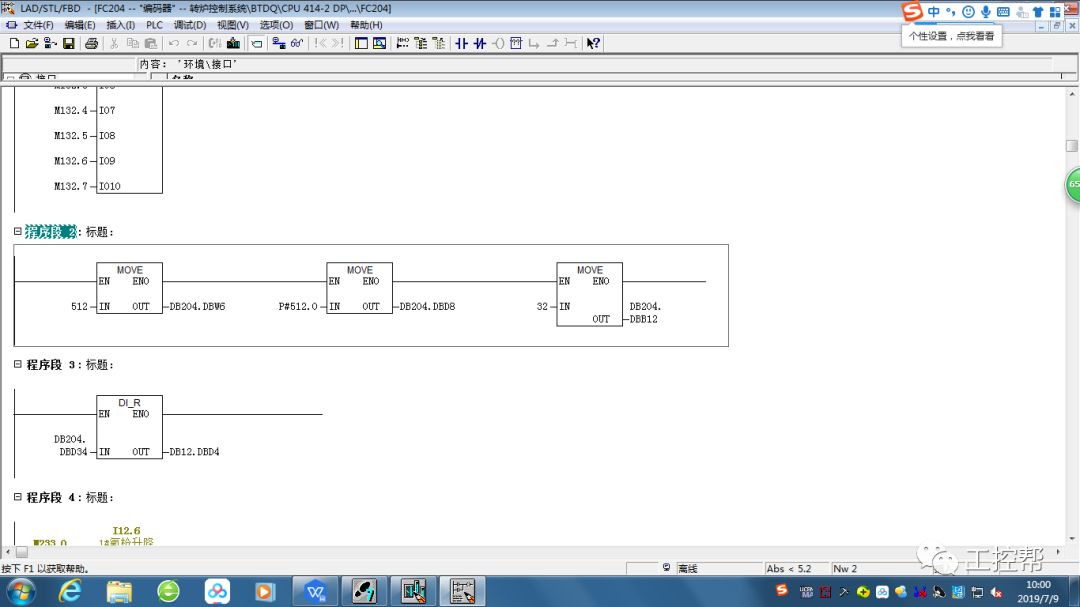
STL語句表程序編制事例如下:
通道1
L512 // 模塊地址 = 512
TDB204.DBW6 // 傳送模塊地址
LP# 512.0// 指針格式的模塊地址
TDB204.DBD8 // 傳送通道 1 的通道地址
L32// 用戶數據接口長度 = 32
TDB204.DBD12 // 傳送用戶數據接口長度
通道2
L512 // 模塊地址 = 512
TDB205.DBW6 // 傳送模塊地址
LP# 512.0 // 指針格式的模塊地址
TDB205.DBD8 // 傳送通道 1 的通道地址
L32 // 用戶數據接口長度 = 32
TDB205.DBD12 // 傳送用戶數據接口長度
-
編碼器
+關注
關注
45文章
3646瀏覽量
134647 -
增量式編碼器
+關注
關注
2文章
38瀏覽量
12624
原文標題:詳解編碼器與計數模塊的連接和編程
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
編碼器與PLC連接及應用

光電編碼器用可編程計數電路的設計與實現
西門子高速計數產品與編碼器兼容性選型參考

如何使用SPI總線設計正交編碼器計數器
開關高速脈沖計數器Modbus RTU編碼器模塊IBF150

如何使用西門子PLC連接編碼器并對編碼器編程
直線光柵尺、角度編碼器、旋轉編碼器、長度計差分信號數據采集模塊
編碼器AB信號脈沖計數器,角度速度位移測量IO采集模塊/轉速測量
1路編碼器脈沖計數器或2路DI高速計數器,Modbus RTU模塊 YL150
旋轉編碼器在PLC中怎么編程
插片式遠程IO模塊:雙通道PNP和NPN高速計數模塊案例說明






 工商網監
工商網監
評論