 維納和圖靈:AI研究之路的關鍵節點和分歧之處
維納和圖靈:AI研究之路的關鍵節點和分歧之處
圖靈和維納的思想都對人工智能的研究之路產生了重要影響,本文討論了AI發展過程中的主要困難,特別是解釋了圖靈的人工智能方法和維納的人工智能方法之間的關鍵區別,啟發現有AI方法的未來研究方向。
艾倫·圖靈,是天才的計算機科學家、數學家、邏輯學家、密碼分析學家和理論生物學家,他被視為計算機科學與人工智能的奠基者之一。
圖靈對于人工智能的發展有諸多貢獻,例如圖靈曾寫過一篇名為《計算機器和智能》的論文,提問 “機器會思考嗎?”(Can Machines Think? ),作為一種用于判定機器是否具有智能的測試方法,即圖靈測試。至今,每年都有試驗的比賽。此外,圖靈提出的著名的圖靈機模型為現代計算機的邏輯工作方式奠定了基礎。
16歲的圖靈
早在1948 年,圖靈就寫了一篇題為《智能機器》的論文,描繪了現在成為人工智能核心的許多概念,包括遺傳算法、神經網絡、強化學習等。在沒有電子計算機的年代,圖靈用紙和鉛筆做出了這項開創性的研究,在今天引發熱議。
諾伯特·維納,是美國著名應用數學家,控制論的鼻祖。維納在數學、物理、工程學、哲學等領域都頗有建樹,但人們始終將創立控制論視為他對科學發展所作出的最大貢獻,稱其為 “控制論之父”。
自從 1948 年諾伯特?維納發表了著名的《控制論 —— 關于在動物和機器中控制和通訊的科學》一書以來,控制論的思想和方法已經滲透到了幾乎有的自然科學和社會科學領域。
諾伯特·維納
圖靈和維納的思想都對人工智能的研究之路產生了重要影響。為了對當前實現人工智能的方法做一個高層次的總結,本文解釋了圖靈方法和維納方法之間的關鍵共性和主要區別。
圖靈所設想的人工智能設計是一次性成型的,而維納所設想的人工智能設計是自主尋找,反復迭代多次后成型。
作者:清華大學自動化系 李力;西安交通大學人工智能與機器人研究所 鄭南寧;中國科學院自動化研究所復雜系統管理與控制國家重點實驗室 王飛躍
本文討論了AI發展過程中的主要困難,特別是解釋了圖靈的人工智能方法和維納的人工智能方法之間的關鍵區別,此外,本文還強調了人類在開發人工智能方面的作用。
特別地,對維納的觀點所涉及的問題、成功的成果、局限性以及現有方法的未來研究方向分別進行了闡述,旨在為讀者提供一個良好的起點和路線圖。
維納和圖靈:AI研究之路的關鍵節點和分歧之處
萊布尼茨(Gottfried Leibniz)在1676年提出通用語言(universal language)的思想。他希望創造一種通用語言來將所有的任務進行計算式的描述。同時,萊布尼茨還設想了一種機器,能夠根據這種通用語言來計算數學論斷是否正確。
之后,希爾伯特(David Hilbert)于1928 年提出了著名的“判定性問題”(Entscheidungs problem):是否存在一系列有限的步驟,它能判定任意一個給定的數學命題的真假?
邱奇(Alonzo Church)和圖靈(Alan Turing)在1936-1937年各自獨立解決了這一問題。他們的主要貢獻在于將“判定性問題”形式化,詳細定義了何為“一系列有限的步驟”。邱奇描述“有限的步驟”的模型為算子(-Calculus),而圖靈描述“有限的步驟”的模型為圖靈機(Turing Machine)。
從現代的角度來看,“判定性問題”中的“有限的步驟”指的就是由條件語句、循環語句等元素搭建而成的一系列可以由機械執行的過程。而這一執行過程也就是我們常說的“算法”。
邱奇和圖靈還探討了“可計算性”的概念,并提出了“丘奇-圖靈論題”(Church–Turing thesis),斷言:假設不考慮計算資源(腦力體力等)的限制,定義在自然數域,能被人通過算法計算的函數,也能被圖靈機計算;反之亦然。
令人欣喜的是,圖靈敏銳的意識到了計算和智能之間的密切聯系,并開始了關于人工智能的研究。1950年,圖靈發表了“計算機器與智能”一文,提出機器可以“模仿”人的思維活動(Turing, 1950)。圖靈認為在沒有真正理解人的心理和意識活動之前,我們只能以“模仿”方式進行機器思維的研究和測驗。很遺憾,圖靈在其有生之年,沒有進一步對該思想進行更為透徹的闡述。
圖靈提出機器可以“模仿”人的思維活動
而另一方面,維納(Norbert Wiener)于1950年出版《人有人的用處: 控制論與社會》一書,將自動機器和人進行了對比,認為兩者均由感知裝置,信息傳遞裝置和行動裝置等構成一個相對獨立的系統。這一系統接受、處理、儲存和傳遞信息,并籍此做出一系列行動,以實現與系統之外世界的互動。
如果將圖靈和維納的想法比較,我們不難看出兩者對于人的智能的抽象方式有著某些共同之處,更有著顯著不同之處。
維納(前排左起第4位)與清華大學電機系師生合影(1936年)
1956年Dartmouth會議之后,人工智能研究取得了持續不斷的進展。不同研究者提出了多種模型來解決特定的問題。特別的,麥卡洛特(Warren Sturgis McCulloch)和皮茨(Walter Pitts)于1943年首先提出的所謂“神經網絡”人工智能模型的極大關注。在經歷了多次低潮之后,Geoffrey Hinton等提出了深度神經網絡,對于傳統神經網絡的網絡結構,訓練方式等進行了重要變革,極大的提升了模型的能力,在圖像識別,語音處理等領域取得了顯著的進展。
目前,人工智能取得了飛速發展和顯著成就,已成為學界和社會關注的焦點。然而,經過了60多年的發展,我們仍然無法準確的回答“什么是人工智能?”“如何用算法實現人工智能?”“如何判定機器是否具有智能”等問題。因此,我們有必要回顧人工智能研究之路的一些關鍵節點和分歧之處,進一步深入考慮人工智能的本質。
在本文中,我們試圖闡述如下幾個話題:
1)圖靈機(通用計算),圖靈測試和人工智能之間的關系;
2)維納的控制論與人工智能的關系;
3)人類智能與人工智能之間的關系。
為了表達方便,我們將自然的方式順序展開我們的討論,并在這一過程中插入我們對于這些話題的思考和觀點。
計算和人工智能:圖靈的方法
維基百科給出的人工智能定義是人工智能是指機器表現出“智能”。不過這一定義沒有點出“任務”這一概念的重要地位。
有鑒于此,我們提出一個更為明確的人工智能定義:人工智能是指機器(在同樣的任務中)表現出(和人類似或一樣的)“智能”。需要指出的是這里的任務是不是指一般計算理論中的計算過程,而是指的是:希望人或者機器做出一系列行動(activities)來實現某種目的。
和這一定義相比較,我們不難發現圖靈認為的實現人工智能需要大致三步:
Step 1. 使用一種通用語言將現實任務描述成特定的數學命題。(智能的表述)
Step 2. 找到一種算法(也即一臺能夠根據這種算法進行計算的機器)解決用這種通用語言描述的數學命題問題。(智能的設計)
Step 3. 找到一種算法驗證所提算法的正確性。(智能的測試)
如何實現Step 2已有諸多論述。然而,解決Step 1的“描述性問題”并不比Step 2的“解決問題”更加容易。如果我們使用某種圖靈機來完成Step 2,則Step 1需要首先確定構成這一圖靈機的各個組成元素(例如輸入,狀態,運行規則等)。但實際上,無論那個元素都不能簡單的得到其描述方式。茲舉一例。
類似于著名的“猴子和香蕉問題”(Monkey and banana problem),假設我們讓機器人進入一個天花板上掛著香蕉,地上放在椅子和棍子的房間,完成摘取香蕉的任務。機器人的高度無法夠到香蕉;但如果站到椅子上揮動棍子,機器人可以摘到香蕉。
猴子和香蕉問題
如果我們不設定機器人具有移動椅子和站到木塊上這兩種行動,而只設定機器人具有移動自身和摘香蕉的行動;則機器人只能遵循著避撞規則在房間里面逡巡不已,卻一直摘不到香蕉,導致這個任務無法完成。而讓成年人類進入同樣的房間完成摘取香蕉的任務,可能不費吹灰之力就能做到移動椅子到合適的位置、站到椅子上、揮動棍子、完成摘取香蕉的任務這一系列行動。這是因為人類已經通過經驗積累和學習,潛意識中完成了對所允許行動集合更為合理的設定。
縱觀過去多年的人工智能研究可以發現,目前尚未有一種方法能將所有任務自動地轉化為計算式的描述,都需要人先將任務轉為機器可以理解的特定圖靈機模型,才能進行計算和求解。
基于上述以任務為核心的人工智能定義,我們可以得到如下的推論:
其一,特定的人工智能對應特定的任務。
其二,通過特定的測試只代表實現特定的人工智能。茲舉兩例:受過高等教育的盲人無法駕駛普通車輛;而目不識丁的健康人也可以駕車行駛(假定我們不去關心其是否識別交通標識)。
其三,通過特定任務的測試是實現特定人工智能的充分必要條件。該論斷的充分性不言自明。如果機器完成了測試,則表明做出一系列行動來實現某種目的。而該論斷的必要性則來自于定義本身。
這3條推論表明,實現人工智能Step 3必不可少。實際上,算法測試這一問題,其實非常類似于圖靈機的“停機判定”問題。只不過對于人工智能而言,我們通常期望和描述的是:需要檢驗一臺特定機器(也即該機器所運行的算法)是否能夠完成特定的任務。
事實上,智能的驗證同樣困難重重。圖靈提出的圖靈測試這一試驗是研究者為解決這一問題所做出的最早努力(Turing, 1950)。結合近年來的深入探討,(Li et al., 2018)一文指出智能測試的難點主要有四:
1)與之前的分析類似,在當前的人工智能研究中,我們經常面臨因為無法精確將問題表述為數學命題,因此也就難以對設計用于完成某項任務的機器的智能進行正確判定。
一個典型例子是無人車的智能測試經常采用所謂場景測試。如果受試車輛能夠自主行駛通過由眾多交通參與者和特定道路環境共同構成的交通系統,則稱為通過該特定場景的駕駛測試。例如DARPA 2005 年無人車挑戰賽便選取了212 公里的沙漠道路作為測試場景;DARPA 2007 年無人車挑戰賽則選取了96 公里的城市道路作為測試場景(Urban Challenge 2007)。但實際上,無人車到底需要完成什么樣的特定任務并未進行細化。因此,這樣的智能測試難以量化,也不易分析測試的有效性和可靠性(Li et al., 2016; Li et al., 2018)。
另外一個典型例子則是圖靈測試。早期的圖靈測試并未明確的規定測試任務以及何種答案可以視為正確。這導致一些試圖通過圖靈測試的機器經常采用摸棱兩可,王顧左右而言他的方式來試圖避免直接回答(Ackerman, 2014; Levesque, 2017)。
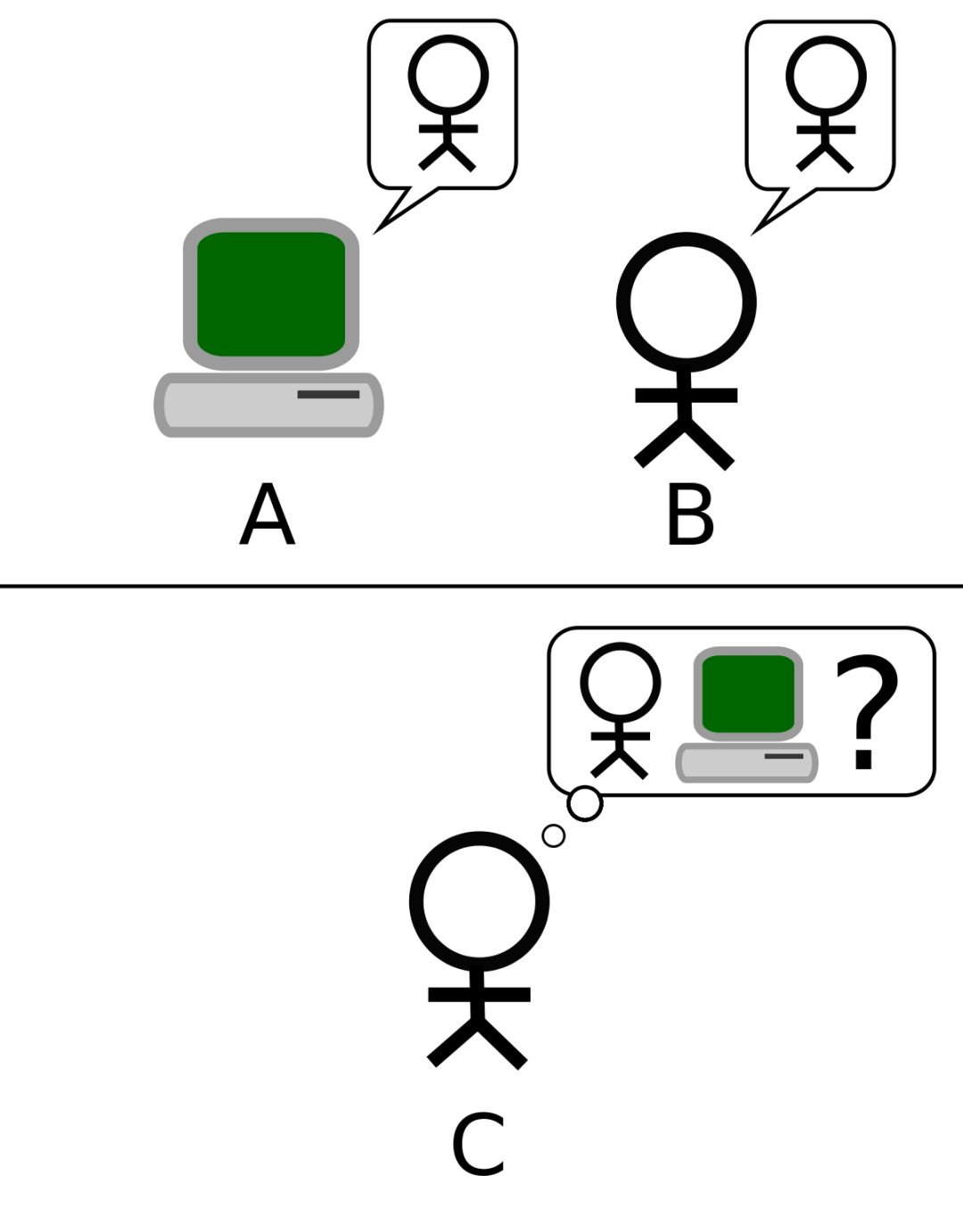
圖靈測試一個標準的模式:C 使用問題來判斷 A 或 B 是人類還是機械
2)隨著任務的難度提升,我們很難驗證受試機器對于任務中出現的任何情況都能做出正確的行動。雖然研究者提出了多種算法來盡量測試可能是最難的特定情況或者盡量覆蓋可能可能出現的所有情況,但我們尚無完善的理論保證受試機器的無懈可擊。
3)為了解決場地實測費時費錢的問題,研究者開始在一些人工智能應用中大量使用仿真虛擬測試的方法。然而,如何保證仿真的真實性和所呈現各種情況的豐富性依舊是目前研究的難點問題之一。
4)在很多應用中,很難直接給出一個非常明確的性能指標來評估所測試的機器是否達到了預期的指標。這個難點經常和難點2)共同出現,且和所考慮的具體人工智能應用密切相關。目前尚不能找到一個通用的模式來建模這一指標。
人工智能的嘗試-測試-調整:維納的方法
維納將1935在中國清華大學的任教和研究經歷視為Cybernetics思想的發軔之初(Wiener, 1964)。最初,Cybernetics研究被設想為:創造一整套表述方法和分析技術,以便統一且有效研究一般的信息、通信和控制問題(Wiener, 1961)。但由于維納使用連續系統的方式來對信息論和通信技術進行建模,導致分析難度很大。而香農(Claude Shannon)使用離散系統的方式來對信息論和通信技術進行建模,獲得了巨大成功(Shannon, 1948)。但維納對于控制技術提出的反饋、穩定和鎮定等概念和理論卻獲得了廣泛認可,導致了現代控制科學理論的誕生。
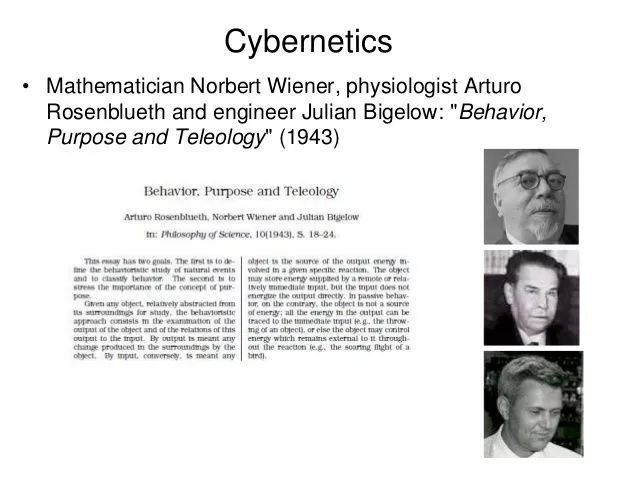
特別的,Rosenblueth,Wiener和Bigelow三人于1943年發表了一篇文章,將控制看作是一個在原因和目的之間隨機試探,不斷驗證和反復調節的過程。在1950年,維納在其著作中將自動機器和人進行了對比,認為這一探索——驗證——調節過程也是人學習新知識,完成各種任務的基本原則(Wiener, 1950)。因此,一些研究者認為維納將反饋控制和智能系統聯系到了一起(Albus and Meystel, 2001; Boden, 2006)。
我們可以根據維納的思路,給出一個新的人工智能的定義:人工智能是指機器通過反復的探索——驗證——調節所獲得的,和人類似或一樣完成特定任務的“智能”。
結合上文的分析,我們不難發現,圖靈所設想的實現人工智能的3個步驟是單向依次進行的。而維納所設想的實現人工智能的3個步驟中,步驟2和步驟3是循環迭代進行,直至所有任務都能被正確解決;參見下圖。換而言之,圖靈所設想的人工智能設計是一次性成型的,而維納所設想的人工智能設計是自主尋找,反復迭代多次后成型。
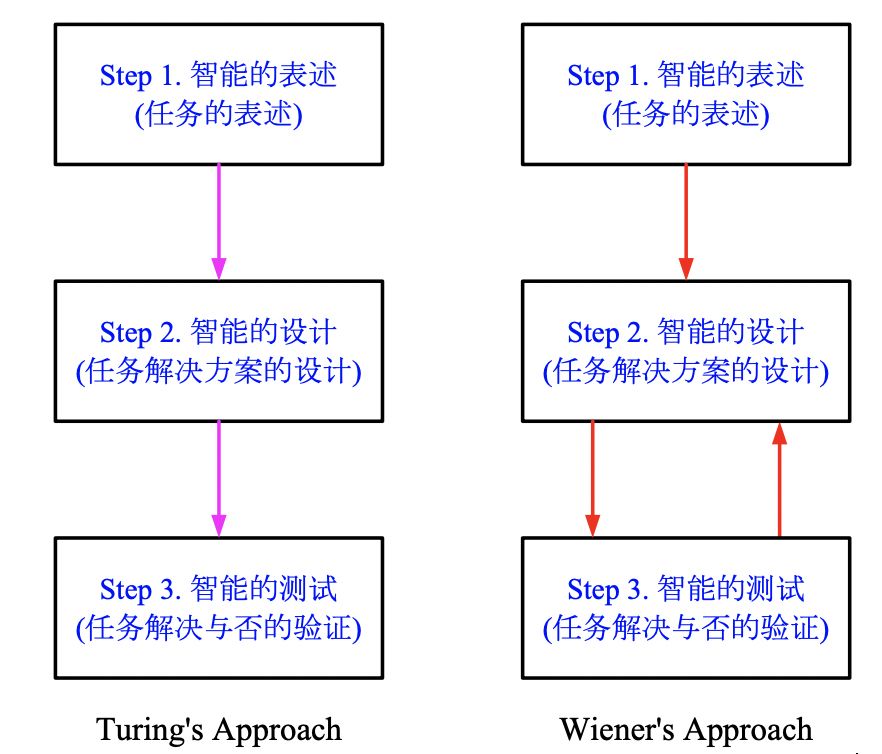
圖靈的人工智能方法和維納的人工智能方法的比較
維納的這一思想為在更少人類智能參與的情況下,實現人工智能帶來了新的解決途徑。但和圖靈一樣,維納未能指明到底應該用何種方式來具體實現人工智能。
踐行維納思想獲得成功的研究首推神經網絡的反向傳播算法在神經網絡中的應用(Werbos, 1975; Rumelhart et al., 1986)。神經網絡一般由多個非線性映射的多層組合構成。我們主要通過不斷修正這些組合之間的初始隨機設定的加權系數來使得使得所研究的神經網絡擬合特定的函數映射。誤差反向傳播是一種根據映射誤差,結合優化方法調整加權系數的方法。神經網絡,特別是深度神經網絡獲得的巨大成功表明維納的探索——驗證——調節框架具有很強的靈活性和適用性(Schmidhuber, 2015; LeCun et al., 2015)。

最近20年來,更值得關注的維納思想成功應用是強化學習(Sutton and Barto, 1998)。強化學習首先界定了機器可能的狀態和所能執行行動的集合;然后借鑒了行為主義理論,界定了行動所獲得的回報函數,并設定任務完成所獲得的匯報最大。接著,機器將按照某種較為簡單的規則來進行探索不同行動獲得的回報如何,驗證當前機器所采取的行動策略是否需要優化,調節更新機器下一步所采取的行動策略,反復迭代直至任務完成。
強化學習首先在維納創立的控制理論中取得了豐碩成果(Wang et al., 2009),接著和人工智能、機器學習的很多領域中都獲得了成功應用。近年來,強化學習和深度學習相結合,使用深度神經網絡來儲存所習得知識,甚至籍此推測未驗證的情況應采取何種行動(Wang, 2016; Wang et al., 2016a; 2016b; 2017; Li et al., 2017)。而這一點又和維納曾經非常關注的神經網絡和聯結主義研究聯系了起來。AlphaGo的大獲成功表明,采用探索——驗證——調節這一框架可以解決一些之前認為難以解決的難題(Silver et al., 2016; 2017a; 2017b)。
但是,目前這一人工智能實現框架依然存在著很多研究問題需要解決,特別是:
1)我們尚沒有很好的方式判斷機器是否已經足夠智能。換而言之,我們經常不能保證機器已經探索和驗證了足夠多的情況,無法保證機器不會遇到不能處理的情況。例如,AlphaGo 雖然打敗了多位人類棋手,但卻在2016年意外犯下錯誤輸給李世石一局(Silver et al., 2016; 2017a; 2017b)。
2)機器可能會記住錯誤的啟發式知識,如何找出這些錯誤的記憶并剔除依然困難。AlphaGo Zero拋棄人類棋手的對弈棋譜似乎避免了記住錯誤的知識(Silver et al., 2016; 2017a; 2017b),但對于其它問題應該如何處理我們尚不得而知。
3)強化學習強烈依賴于我們探索和驗證的情況的數目,如果所需的數據量巨大,則整個問題的求解難度依然不容忽視。AlphaGo Zero雖然能夠在數天內學會下棋,但這是建立在Deepmind公司依靠強大的硬件資源積累了海量模擬對局數據的結果。如何減少對于數據的依賴是今后我們需要深入研究的方向之一。
4)很多問題我們難以直接定義合適的回報函數。為了解決這一問題,研究者提出了很多設想。例如模仿學習就是先從外在表現上模仿人類解決同樣問題的行動,然后籍此建立初步的啟發式知識(Hussein et al., 2017)。但這些研究結果還不具有很廣的普適性。
不難發現,由于探索和驗證是維納設想的實現人工智能的重要步驟,本節提到的很多問題與上節討論圖靈實現人工智能所做測試中遇到的問題有本質的相似性。
人工智能還離不開人類智能的幫助
在當前階段,設計和實現人工智能還不能離開人類智能的幫助。
首先,在智能表述部分,只有人類將特定任務轉為為機器可以理解的特定圖靈機模型,才能將計算和求解的工作留給機器來完成。
其次,圖靈所設想的人工智能算法設計必須人類的參與。而維納所設想的探索——驗證——調節框架中,人類的參與可以大大減少。但目前還沒有一種方式能夠自動定義探索的行動集合,驗證方式和調節方式。
最后,即使是人類可以較少參與的智能驗證部分,尚有評價函數,停止條件等諸多內容需要人類專家來設置。
因此,從這一角度來看,目前的人工智能研究都屬于人類智能和人工智能的混合(Zheng et al., 2017)。人類的奇思妙想和機器的高速低誤差計算的結合,才早就了現在人工智能的成功。
此外需要注意的是,人工智能已經在某些特定的任務上超越了人類。因此,我們對于人工智能的定義或可改為:人工智能是指機器(在同樣的任務中)表現出(和人類似或一樣的,甚至是超越的)“智能”。
但今后人工智能機器是否能在所有任務中完全超越人類尚不得而知。圖靈認為“根據哥德爾定律或者其它類似論據,一個人可以明白,無論機器構造如何,總會遇到一些無法給出答案的情況;但另一方面,一個數學家總可以得到他想得到的東西)”而維納則暗示人和機器是并列甚至等同的地位,兩者實現智能的方式本質并無不同。
因此,如何探究人類智能和人工智能的分野是今后需要關注的方向之一。值得指出的是,雖然研究者在過去幾個世紀中投入了大量的人力物力,但迄今依然不能很好的解釋人腦的運作機制和智能產生的內部過程。也許借鑒人腦的研究成果有助發展出更為強效的人工智能。
一切為了人類心智的榮耀!
本文探討了分別從圖靈和維納而來的,實現人工智能的兩大類思想。可以看到,圖靈的想法接近功能主義,著眼于智能機器內部,主要研究智能機器的內在結構和運行方式,把機器和環境的關系放在次要地位。而維納的想法接近行為主義,強調智能機器和環境的關系,著眼于外部,研究機器與環境各種輸入輸出的關系以及根據這些關系來調節機器。
這兩種不同的思想帶來不同的人工智能理論和實現方法,也各自有困難尚未解決。我們希望本文對于圖靈和維納實現人工智能的兩大類思想的對比,能有助于研究者開闊思路,建立更為強勁的新一代人工智能機器。
在精密加工領域,我們使用粗糙的加工工具(如斧頭和銼刀)制造了最早的機床。然后我們不斷用低級的機床迭代更新制造出更加精密的機床,直到現在我們可以制造CPU和GPU。
類似的,我們也正在用低級的人工智能幫助制造更為高級的人工智能。在這些人工智能的幫助下,人類所能解決的任務也越來越多。
從這個角度來看,人類智能也在不斷的提高。而這一切,正是“為了人類心智的榮耀!”
-
計算機
+關注
關注
19文章
7518瀏覽量
88192 -
人工智能
+關注
關注
1792文章
47409瀏覽量
238924
原文標題:通向人工智能的道路:圖靈機與控制論之分歧
文章出處:【微信號:industry4_0club,微信公眾號:工業4俱樂部】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
東京裸機云大寬帶服務器的特別之處
小鵬汽車:未來AI汽車將搭載至少3顆圖靈芯片
小鵬汽車圖靈芯片及L4自動駕駛新進展
小鵬汽車2024 AI科技日:圖靈AI芯片進展公布,預計AI汽車市場將迎來巨變
小鵬汽車發布自主研發的“圖靈”AI智能駕駛輔助系統
小鵬AI科技日:圖靈AI芯片40天完成2791項驗證
《AI for Science:人工智能驅動科學創新》第二章AI for Science的技術支撐學習心得
《AI for Science:人工智能驅動科學創新》第一章人工智能驅動的科學創新學習心得
貝恩資本取消鎧俠IPO計劃,估值分歧成關鍵
圖靈測試的內容是什么_圖靈測試的作用
圖靈測試什么意思_圖靈測試是干嘛的
IBM助力圖靈新智算構建全能AI平臺
國芯科技與圖靈量子簽署戰略合作協議






 工商網監
工商網監
評論