 關于iPhone8給這個市場帶來的沖擊和發展
關于iPhone8給這個市場帶來的沖擊和發展
深度感知與iPhone 8
今年是iPhone誕生的第十年。按照蘋果的傳統,大家都相信今年發布的新iPhone會有很大的技術革新。而根據供應鏈的消息,蘋果早在今年年初就開始布局3D深度感知元件,可見深度感知非常可能是iPhone 8技術突破之一。
手機為什么需要深度感知?因為使用深度感知配合攝像頭,可以做人臉的精確3D建模。大家知道,隨著人工智能的崛起,面部識別技術越來越成熟,SenseTime、海康威視等不少公司都提供了基于深度學習人工智能的面部識別解決方案,目前這些方案已經在門禁系統、保安監視系統甚至ATM機中使用。然而,基于傳統二維攝像頭的人臉識別存在很大問題,即無法區分真實三維人臉與二維照片,因此這樣的身份認證系統容易被一張照片破解,如之前爆出的支付寶刷臉支付被照片騙過認證就是這樣的問題。
而一旦擁有人臉的3D建模,這個安全漏洞就被補上了。而且,使用高精度人臉3D建模,人臉識別的準確度也可以大大提高。iPhone 8如果使用刷臉解鎖,其用戶體驗比起指紋認證更方便,更快速,同時也會引起一大波手機廠商跟風。
深度感知除了用在前置攝像頭的位置用于刷臉認證之外,還可以用在后置攝像頭,用于AR/VR應用。AR/VR應用中往往需要對周圍環境和手勢做3D建模,因此也需要深度感知。結合前不久蘋果剛在WWDC發布的ARKit,在未來的iPhone使用后置深度感知也不無可能。
深度傳感主流技術
目前,有三種主流深度傳感技術:結構光,ToF以及攝像頭陣列。結構光技術精度高,但是對于使用環境有較多限制,最有可能用在前置攝像頭做高精度3D人臉建模,即用于刷臉;ToF精度一般,對于環境光容忍度較好,適用于中等大小空間的建模以及動態姿勢/手勢建模;攝像頭陣列精度較差,但可以用于大尺度寬闊空間3D建模。
結構光技術
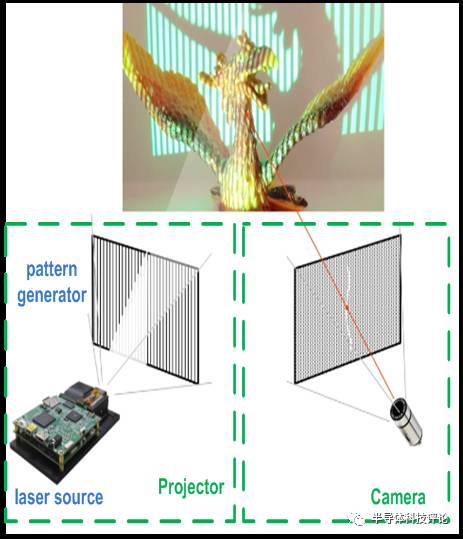
結構光技術常使用激光作為光源,并用光源把設計好的圖樣投影到目標上。根據目標深度變化,反射光的圖樣會發生變化,通過比較入射參考圖樣和反射圖樣就能估計深度。圖樣分為時變圖樣和形變圖樣,時變圖樣在不同時間投射不同的圖樣并掃描整個空間,形變圖樣則一次投射圖樣到整個空間,而每個地方投射的圖樣略有不同并計算深度分布。時變圖樣計算較簡單,但掃描時間長,而形變圖樣計算較復雜,但是可以一次計算整個空間的深度分布。
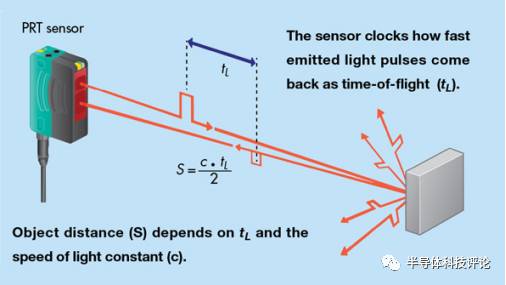
ToF
ToF系統中,光源發射一束光,傳感器檢測到反射光并記錄光從ToF傳感器入射至物體到從物體反射回ToF傳感器的時間間隔,即光的飛行時間。通過將非常時間乘以光速就可以知道目標物體在空間中的深度信息。ToF傳感器的光學系統與傳統RGB攝像頭很接近,只是ToF傳感器輸出的是深度信息而非RGB攝像頭輸出的光強。
基于脈沖的ToF傳感器系統
移動設備中常用的計算飛行時間的方法是通過調制光源(如周期性地改變光源的強度),并且檢測反射光相當于入射光的調制相位變化。相位變化測量目前已經有成熟的混頻技術可以實現。
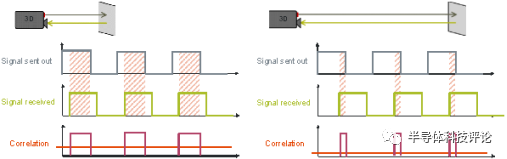
基于調制光的ToF傳感器。激光光源以方波形式調制,通過將反射光與入射參考光做混頻可以估計飛行時間。
基于調制的ToF有一個主要問題,即距離混疊。當入射光和反射光調制相位差為φ時,我們可以估計飛行距離d=(c/4πf)φ, 其中c是光速,f是光源調制頻率。然而,相位是一個周期函數。一個典型的φ-d圖如下圖所示。我們可以看到φ-d僅僅在一小段范圍內單調。因此如果探測到的相位是60度,實際的相位除了可能等于60度以外還可能等于420度(60+360),780度(60+360*2),等等。故此,d也不能完全確定,除非d的距離范圍事先給定并且落在φ-d的一段單調區間內,因此基于調制光的ToF測量范圍有限。此外,基于調制光的ToF的精度和測量范圍還是一對矛盾。想要深度測量范圍大,則需要較低的調制頻率;如果想要深度測量精度高,則需要較高的調制頻率。這就進一步限制了基于調制光ToF的性能。一種流行的提高測量范圍的技術是先后使用兩個不同的調制頻率并將兩次結果結合起來來估計深度,不過這會增加ToF測量的延遲。另外,LED光源所支持的調制頻率上限較低,因此深度測量精度也較激光要差。
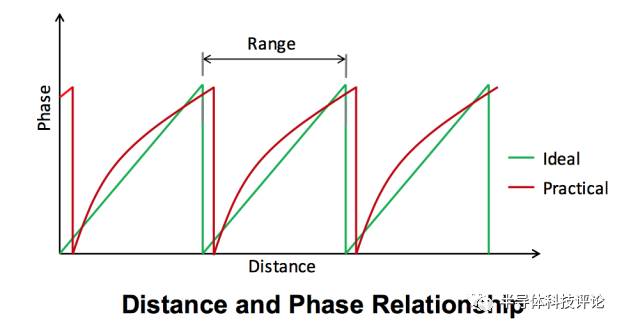
相位-距離圖,相位-距離關系僅僅在一小段距離里是單調的,因此會造成混疊。
攝像頭陣列
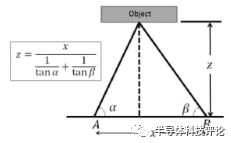
攝像頭陣列通常使用在不同位置的多個攝像頭來拍攝多幀圖像,并且根據多幀圖像間的細微差別來估計深度。在CV領域,專業術語叫做“立體視覺”。目前,最簡單但也是用得最多的攝像頭陣列就是雙攝像頭,其中兩個攝像頭的位置稍有距離以模仿人眼。空間中每一個點在雙攝像頭拍攝到的兩幀圖像上都略有區別,根據幾何學我們可以計算該點的深度。
攝像頭陣列部署方便,成本也很低,但是主要難點在于如何找到同一個點在多幀圖像上的位置(專業術語叫做“匹配點”)。目前基于深度學習的算法可以幫助找匹配點,但是需要的計算量非常大,在移動設備上會消耗許多電池電量。
技術比較
總體性能而言,深度感知最關鍵的性能是精確性。在這方面,結構光最強,而攝像頭陣列通常最弱。
另一個重要指標是深度測量范圍。結構光的測量范圍最小,而ToF的測量范圍則取決于發射光的強度以及光源類型。攝像頭陣列的測量范圍取決于攝像頭間的距離。對于通常的攝像頭陣列,其測量范圍通常在10m以上,也就是說沒法測量距離很近物體的深度。
此外,還有深度圖的分辨率指標。結構光分辨率比ToF更好,因為結構光的發射圖樣可以被光學元件精確控制。理論上說,攝像頭陣列也有很高的分辨率,但是這基于每一個點都能被完美匹配的基礎上。在通常無法完美匹配的情況下,攝像頭陣列的分辨率會下降。
最后,我們還要考慮環境亮度。結構光需要工作在較暗的環境中。ToF傳感器對于環境亮度容忍度較好,而且隨著背景消除技術的發展ToF能工作的環境亮度范圍正在越來越廣。攝像頭陣列只能工作在較亮的環境下。在黑暗的環境下,攝像頭陣列拍攝的圖像質量變差,因此匹配點搜索變得更加困難,深度感知算法性能也會變得更差。
中國半導體廠商的機會
深度感知解決方案包括多個部件,如激光光源、光學元件以及傳感器芯片等,另外模組也有機會。中國大陸半導體廠商總體在深度傳感產業鏈中參與度還不高,在光學元件方面有馭光等初創公司在開發衍射元件,另外在模組方面,奧比中光則是深度感知方面較為領先。隨著深度傳感器市場逐漸打開以及半導體行業往中國大陸移動,可望在大陸在整體產業鏈方面能繼續發力。
-
移動設備
+關注
關注
0文章
502瀏覽量
54732 -
分辨率
+關注
關注
2文章
1067瀏覽量
41956 -
傳感器系統
+關注
關注
0文章
37瀏覽量
12777
發布評論請先 登錄
相關推薦
帶你看懂什么是---機械沖擊試驗
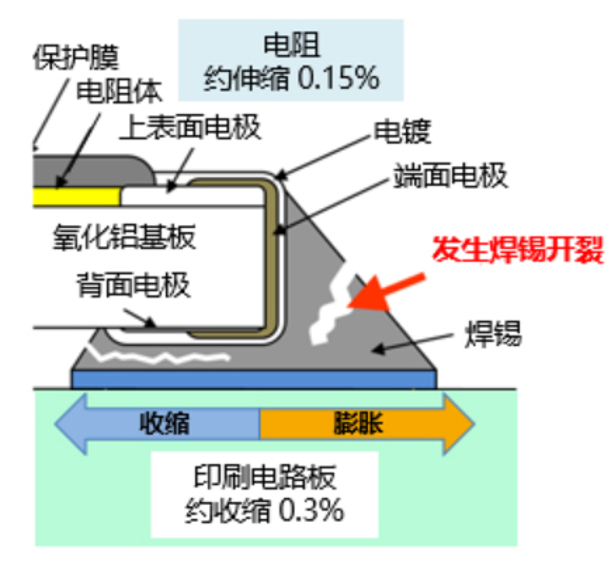
焊錫開裂:熱沖擊應力下的質量挑戰
國產8位單片機在國內的應用情況及發展趨勢!
5v適配器經TPS63030,給運放MCP6v71.TPS63030的帶來的噪聲有點大如何解決?
涌保護器沖擊電流怎么選
手機連接esp32 ble設備,部分機型連接不上ble是什么原因導致的?
蘋果折疊屏iPhone新專利獲批
求助,關于STM8的EEPROM問題求解
金屬氧化物壓敏電阻的沖擊破壞機理&高能壓敏電阻分析
沖擊電流作用下氧化鋅電阻片的動態伏安特性
沖擊電流測試的測試步驟是什么
溫度沖擊試驗箱的性能解說

鎧俠已決定停用浦科特 傳奇品牌退出市場
蘋果iPhone16將配備8GB RAM
關于FPGA的開源項目介紹





 工商網監
工商網監
評論