 關于四旋翼飛行器的核心知識介紹和應用分析
關于四旋翼飛行器的核心知識介紹和應用分析
當今飛行器的發展已經給我們的生活帶來了極大的便利。雖然因安全性的問題遭到了一些限制,但是就目前來說,飛行器的發展給人們帶來的便利仍然無法取代。各行各業越來越多的人們更多地愿意接受并使用這一科技帶來的新產品。
例如,飛行器在植保、快遞、搜救、航拍以及巡檢方面的普及速度非常快。隨著需求不斷的擴大,未來在這些方面,使用飛行器取代傳統的作業方式就指日可待了。
而比較普遍的四軸飛行器跟其他類型相比差異在于,它的硬件結構更簡單緊湊,但是軟件就比較復雜,所有除了搞懂理論知識之外還需要實物操作講解,這樣才能事半功倍,那么我在這給大家簡單羅列梳理一下飛行器里比較核心的知識點,希望能帶給大家一幫助。
感興趣或者接觸過的人都知道四軸飛行器是如何飛行的?四軸飛行器的螺旋槳與空氣發生相對運動,產生了向上的升力,當升力大于四軸的重力時四軸就可以起飛了。
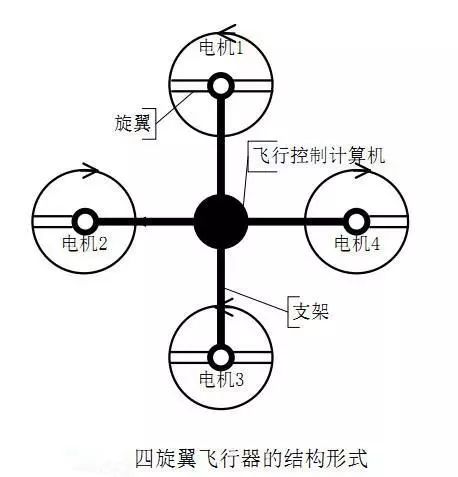
四軸飛行器飛行過程中如何保持水平,我們先假設一種理想狀況,如果四個電機的轉速是完全相同的,是不是我們控制四軸飛行器的四個電機保持同樣的轉速,當轉速超過一個臨界點時(升力剛好抵消重力)四軸就可以平穩的飛起來了呢?
答案是否定的,由于四個電機轉向相同,四軸會發生旋轉。我們控制四軸電機1和電機3同向,電機2電機4反向,剛好抵消反扭矩,巧妙的實現了平衡,但是實際上由于電機和螺旋漿本身的差異,造成我們無法做到四個電機產生相同的升力,這樣飛行器起飛之后就會失去平衡,所以需要對飛行器設置好四軸運算和飛控。
那什么是飛控呢?
無人機或者飛行器的控制器就叫做飛控,了解這種控制方法不僅是其中的四軸算法還包括控制對象、控制器等等。
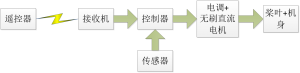
傳感器構成控制回路的閉環,遙控器給過來的信號可以作為控制目標,這時只涉及到油門控制也就是油門曲線和姿態之間的控制問題。但如果將遙控器或者地面站已經設定好的路徑,功能中蘊含的姿態,如定高、特殊油門、自動起降等等,飛控需要自己完全接管姿態控制,輸出是為了控制電機轉速—針對四旋翼的控制原理就是承兌的電機調速:
飛控中常用的算法有幾個,例如四軸算法中的PID,智能PID如模糊PID,也有采用LQR,變結構控制器等等。控制系統結構上面一般采用閉環的形式,分出姿態環和位置環進行控制。
那么四軸飛控用的什么算法?
▲四軸飛行器算法主要是濾波算法和姿態算法還有PID算法。
1.濾波算法主要是將獲取到的陀螺儀和加速度計的數據進行去噪聲及融合,得出正確的角度數據。主要采用互補濾波或者高大上的卡爾曼濾波。
2.姿態算法是將獲得的濾波后的傳感器數據計算得出飛行器自身坐標系與地理空間坐標系的偏差,即歐拉角。一般采用四元數算法。
3.PID算法就是用來控制四個電機的轉速來糾正歐拉角,從而使機身保持平穩。四軸上一般都裝有陀螺儀,他可以測得四軸的實時飛行姿態。得到這些數據后再有微控制器通過PID來調整四軸的飛行姿態,并達到期望值。
飛行器的姿態控制是四軸飛行器核心技術所在。其中的PID控制算法相對簡單且技術成熟,是目前控制算法中的首選。PID算法即是PID控制器的靈魂,其對多旋翼飛行器很重要。那算法自己學習能學會嗎?
因為四軸主要分為硬件驅動部分,和算法部分。算法部分主要是三個,第一個是濾波技術,需要用在姿態數據處理,ahrs算法解算姿態,再就是pid這里pid一般用雙環串級pid,單級的缺點很多。
其實想做到這一步還需要有不錯的C語言基礎以及扎實的調節驅動能力以及算法的參數,另外調節pid也是和有技巧的,建議多看看調節pid心得,多調試然后對照別人的理論就會掌握。在一個你需要做的就是掌握pcb的制作,會使用ad軟件,這是pcb的入門,花幾塊板子練一下手,然后就可以制作飛控主控版了。
說的倒是很輕松,現實是需要花很多時間在算法的更新、系統級設計與優化。現在網上已經有很多開源程序,自己有動力制作的話要做出來不難,但是想要做好就很難了,簡單的飛行器,購買硬件、組裝、開源代碼等都能解決,難就難在調試,調試出適合的參數來保證飛機調整各種姿態的時候響應速度都要恰好,這都是需要大量數據的積累和成功案例的借鑒學習。
全面的理論知識與實物操作的四驅飛行器教學視頻,去哪找呢?
電子發燒友學院向你推薦《張飛四旋翼飛行器》視頻課程。本課程是張飛老師結合自己十多年的研發經驗,基于“無人機”實物上用“視頻教程”的方式來詮釋軟硬件開發的核心技術,在開源的基礎上進一步的把軟件代碼一行行一步步實現的原理,馬達驅動的控制,硬件電路圖的構思與繪制,PCB板layout的過程與細節,另外還把自身多年研發經歷中遇到的坑,用視頻的方式傾囊講述。內容邏輯清晰,通俗易懂。讓新手也能做一個完全屬于自己的軟硬綜合項目。
-
傳感器
+關注
關注
2551文章
51163瀏覽量
754133 -
控制器
+關注
關注
112文章
16382瀏覽量
178313 -
四旋翼飛行器
+關注
關注
18文章
76瀏覽量
40328
發布評論請先 登錄
相關推薦

掌握EMC核心知識——7天倒計時!

零重力飛機工業完成超億元A+輪融資
欣旺達:已具備低空飛行器電池研發生產能力
為何無人機領域廣泛采用PX4作為核心控制平臺

中科宇航研發太空旅行飛行器,預計2028年開展太空邊緣載人旅游
高清畫質、低時延,圖傳技術如何展現FPV穿越機的“速度與激情”

上海峰飛航空領先全球低空飛行器領域,展望2040年
基于非線性自適應學習控制器的四軸飛行器避障方案
收藏!IGBT7系列分立器件核心知識點最全整理!
廣汽飛行汽車首次完成城市公眾環境復雜低空飛行驗證
IGBT7系列分立器件核心知識點最全整理!

四旋翼無人機飛行原理【其利天下無人機方案開發】

基于RT-Thread與滑模控制的微型多旋翼定點控制系統研究





 工商網監
工商網監
評論