") 關(guān)于伺服驅(qū)動器和機器人的智能制動控制分析介紹
關(guān)于伺服驅(qū)動器和機器人的智能制動控制分析介紹
變速驅(qū)動器廣泛用于各種應(yīng)用,包括機器人和計算機數(shù)控(CNC)機器。安全一直以來都是大家非常關(guān)注的問題,因為無論什么時候,這些與人類息息相關(guān)的系統(tǒng)都會涉及到保持和運動控制。TI新近開發(fā)的具有內(nèi)置安全相關(guān)特性的驅(qū)動器摒棄了傳統(tǒng)的控制方法,無需再使用停機和轉(zhuǎn)速監(jiān)控器、限位開關(guān)、位置攝像頭和接觸器等,這大大提高了系統(tǒng)的可靠性。
本設(shè)計提供雙通道輸出信號控制外部保持制動器,從而可遵循 IEC EN 61800-5-2 實現(xiàn)伺服驅(qū)動器的安全制動控制功能。當(dāng)電源切斷時,保持制動器將鎖定,當(dāng)在線圈上施加電壓時,保持制動器將釋放。這是通過啟用/禁用為線圈供電的智能電子負(fù)載開關(guān)實現(xiàn)的。該參考設(shè)計還具有診斷功能,可檢測多種故障,確保安全操作。TIDA-01600 使用 C2000Launchpad 生成制動控制信號并執(zhí)行診斷功能。
特性
實施符合 EN 61800-5-2 規(guī)定要求的安全制動控制
保持制動器額定電壓 24V、電流高達(dá) 2A,可通過獨立控制信號進(jìn)行控制
雙路開關(guān)控制提高操作安全性
自診斷功能涵蓋開路檢測和過流保護(hù)
高側(cè)開關(guān)故障檢測
通過快速減小保持制動器電流,快速應(yīng)用保持制動器
可選擇減小保持制動器輸出電壓,從而降低功耗
應(yīng)用
伺服驅(qū)動器、機器人和CNC
制動閘控制器
1系統(tǒng)概述
自動化生產(chǎn)過程中存在著大量風(fēng)險因素,特別是垂直運動情況下的重力,如果發(fā)生電源故障或制動裝置失靈,后果將不堪設(shè)想。“安全制動控制”(SBC)功能可實現(xiàn)制動器的安全控制,從而防止吊掛荷載掉落。在CNC機器中,SBC可防止由于外力作用而發(fā)生移動。
SBC符合變速驅(qū)動器的EN 61800-5-2: 2007功能安全標(biāo)準(zhǔn)。SBC會提供安全的輸出信號來驅(qū)動外部機械制動器。所使用的制動器必須是安全制動器,其靜態(tài)電流用于對抗彈簧的作用力。如果電流中斷,則制動器嚙合。控制模塊通常具有降功特性,可在制動器松脫后減少能耗或制動器發(fā)熱。具有吊掛荷載的軸上通常會使用保持制動器和行車制動器。SBC功能通常用于控制保持制動器,且會在軸停止時立即激活。
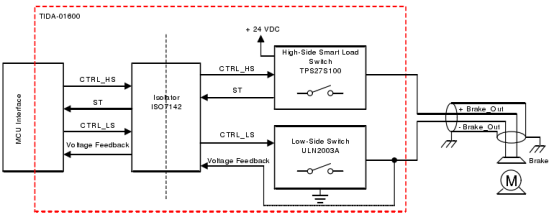
本參考設(shè)計為額定電流最高為2A的保持制動器實施了SBC功能。本設(shè)計將TPS27S100用作高側(cè)智能開關(guān),將ULN2003A用作低側(cè)開關(guān)。我們實施了雙開關(guān)控制來確保制動器的安全運行。通過數(shù)字隔離器IS07142將制動器控制信號與控制器隔離。通過TPS27S100,本設(shè)計可以在制動器輸出上檢測開路和短路情況,從而提高系統(tǒng)的安全性。低側(cè)開關(guān)上的PWM會減小制動線圈的輸出電壓,從而減少制動器通電時的功耗。負(fù)載開關(guān)消除了離散元件,提高了系統(tǒng)的可靠性。下圖是本參考設(shè)計的方框圖和系統(tǒng)規(guī)格.
方框圖
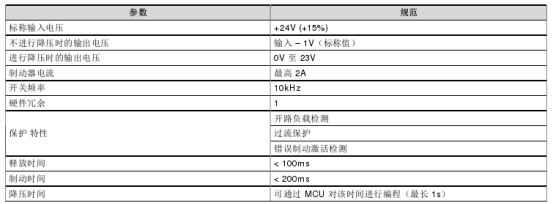
系統(tǒng)規(guī)格
2系統(tǒng)方框圖
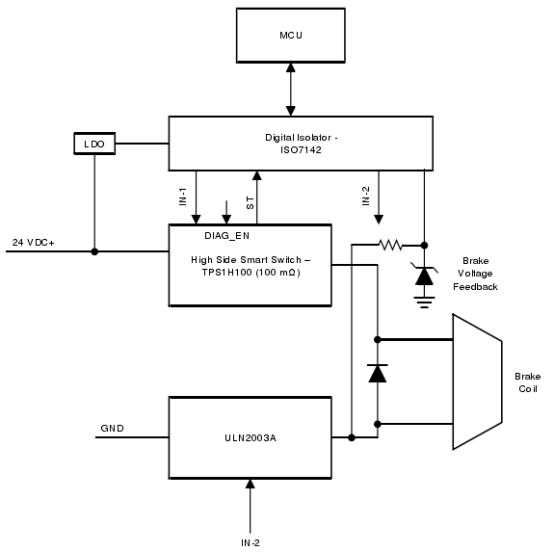
本設(shè)計提供了一種在伺服驅(qū)動器中實施SBC的參考解決方案。SBC功能可提供安全輸出信號,來控制外部制動器。它可以控制額定電流最高為2A的保持制動器。本設(shè)計的主要部件包括IS07142數(shù)字隔離器、高側(cè)智能開關(guān)TPS27S100和低側(cè)開關(guān)ULN2003A。制動線圈連接在這兩個開關(guān)之間。微控制器(MCU)產(chǎn)生的數(shù)字輸入信號會通過數(shù)字隔離器打開和關(guān)閉這些開關(guān)。
該電路板通過兩個外部24V電源供電。MCU和數(shù)字隔離器的VCC1使用LMZ14201 SIMPLE SWITCHER⑧通過24V電源提供的3.3V輸出進(jìn)行供電。高側(cè)開關(guān)和數(shù)字隔離器的VCC2使用TPS7B6933 LDO通過24V電源提供的3.3V輸出進(jìn)行供電。
該系統(tǒng)具有過載、短路和過熱保護(hù),而且可以檢測開路負(fù)載。TPS27S100的狀態(tài)輸出引腳會產(chǎn)生對應(yīng)于開路負(fù)載檢測以及短路和過熱保護(hù)的故障信號。系統(tǒng)會將該故障信號通過隔離器饋送至MCU。來自制動線圈的電壓反饋可用于監(jiān)控意外接通,還可用于調(diào)整來自制動線圈的電壓。您可以在ULN2003A低側(cè)開關(guān)上選配PWM特性,以便控制制動線圈的峰值和保持電流。
3
核心器件
(1)IS07142CC
IS07142CC是一款四通道隔離器,其中正反向通道各兩個。IS07142CC可針對最高2500VRMs的電壓提供1分鐘的電隔離(UL標(biāo)準(zhǔn)),以及提供4242V的峰值電壓電隔離(VDE標(biāo)準(zhǔn))。
(2)TPS27S100
TPS27S100是一款受到全而保護(hù)的單通道高側(cè)開關(guān),具有集成式NMOS和電荷泵。
(3)U LN2003A
ULN2003A器件是一個高電壓、高電流達(dá)靈頓晶體管陣列。
(4)LMZ14201
LMZ14201 SIMPLE SWITCHER電源模塊是一款易于使用的降壓直流/直流解決方案,可驅(qū)動最高1A的負(fù)載,并具有出色的電源轉(zhuǎn)換效率、線路和負(fù)載調(diào)節(jié)以及輸出精度。
(5)TPS7B6933
TPS7B6933-Q1高電壓線性穩(wěn)壓器可在4V至40V的輸入電壓范圍內(nèi)運行。
(6)TVS3300
TVS3300是一種單向精密浪涌保護(hù)鉗位器,工作電壓為33V,專門為保護(hù)工業(yè)、通信和工廠自動化領(lǐng)域中使用中電壓軌的系統(tǒng)而設(shè)計。
4
系統(tǒng)原理圖
(1)直流電壓輸入
本設(shè)計適用于在24V (+15)的直流電壓下運行。電路板上有兩個獨立的連接器,用于為初級側(cè)和次級側(cè)提供24V電源。J1是為初級側(cè)提供24V直流電壓的輸入連接器。直流電壓可在連接器J2處施加到本參考設(shè)計上。TVS3300是在雙向配置內(nèi)連接的33V精密鉗位器,可在高壓瞬態(tài)期間提供保護(hù)。電感器L1和電容器C8組成了功率濾波器。
(2)低功耗四通道數(shù)字隔離器
MCU通過IS07142數(shù)字隔離器發(fā)送控制信號,獨立地驅(qū)動高側(cè)和低側(cè)開關(guān)。此外,來自高側(cè)開關(guān)的狀態(tài)引腳輸出(可提供故障狀態(tài)的診斷范圍)和來自制動線圈的電壓反饋會通過數(shù)字隔離器反饋至MCU 。下圖顯示了IS07142的電路。
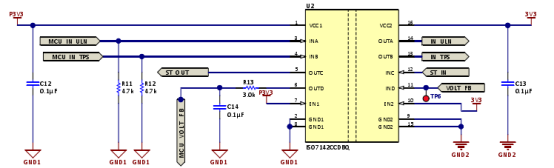
數(shù)字隔離器IS07142的原理圖和電路
VCCI引腳上施加的是使用LMZ14201 SIMPLE SWITCHER生成的3.3V電壓。C12 (0.1μF)用作VCCI引腳的局部去禍電容器。隔離器的EN1引腳連接至高電平,以啟用初級側(cè)中的輸出通道。VCC2引腳上施加的是使用TPS7B6933 LDO生成的3.3V電壓。C13(0.1μF)用作VCC2引腳的局部去耦電容器。隔離器的EN2引腳連接至高電平,以啟用次級側(cè)中的輸出通道。
(3)高側(cè)開關(guān)
使用TPS27S100作為高側(cè)開關(guān)。下圖顯示了高側(cè)開關(guān)的電路。
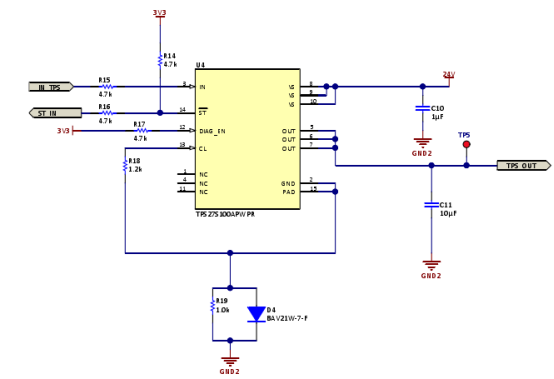
高側(cè)開關(guān)TPS27S100電路的原理圖
該開關(guān)通過24V外部電源供電。IN引腳是用于激活該開關(guān)的控件。輸入信號由MCU提供。連接到CL引腳的電阻器會設(shè)置電流限值。本設(shè)計旨在獲得2A的電流限值。用于設(shè)置該限值的電阻器值可通過下列公式計算得出:
使能引腳(DIAG_EN)永久連接到3.3V電源軌,以實現(xiàn)持續(xù)診斷監(jiān)控。FLT引腳是開漏診斷狀態(tài)輸出。電阻器R14是連接的上拉電阻器,用于獲取數(shù)字信號輸出。FLT引腳會在檢測到過流、短路、熱關(guān)斷或開路情況時變成低電平。輸出引腳通過連接器J5連接至制動線圈的一端。R19和D4形成GND網(wǎng)絡(luò),以保護(hù)器件免受反向電流的損害。連接電阻器R15, R16和R17則是為了在過流情況下為MCU提供保護(hù)。
(4)低側(cè)開關(guān)
本參考設(shè)計使用ULN2003A作為低側(cè)開關(guān),這是一個高電流達(dá)林頓晶體管陣列。下圖顯示了低側(cè)開關(guān)的電路。
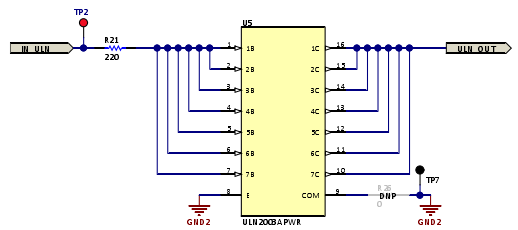
低側(cè)開關(guān)U L N2003A電路的原理圖
ULN2003A由7個達(dá)林頓晶體管對組成,每對都具有500mA的額定電流。所有晶體管對都是并聯(lián)的,因此可提供更高的電流。用于激活該開關(guān)的輸入信號由MCU提供。系統(tǒng)通過連接器J5將該開關(guān)的輸出提供給制動線圈的另外一端。
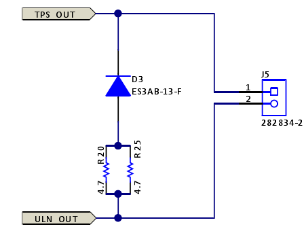
(5)緩沖器電路
下圖顯示了跨過制動線圈連接的緩沖器電路。開關(guān)打開時,如果電流減少,線圈的電感就會產(chǎn)生反極性電壓,這會損壞開關(guān)。電阻器R20和R25均與通信二極管D3串連,它們又作為一個整體與制動線圈并聯(lián),以提高制動線圈的退磁速度,從而保護(hù)開關(guān)免受高反向電壓瞬態(tài)的影響。
(6)來自制動線圈的電壓反饋
制動線圈的電壓反饋取自低側(cè)開關(guān),而后會通過數(shù)字隔離器饋送至MCU。該反饋過程是為了監(jiān)控輸出電壓并據(jù)此調(diào)整低側(cè)開關(guān)的輸入PWM信號。電阻分壓器用于將電壓從24V降低至3.3V,以將其饋送至MCU。下圖顯示了制動器電壓反饋電路。
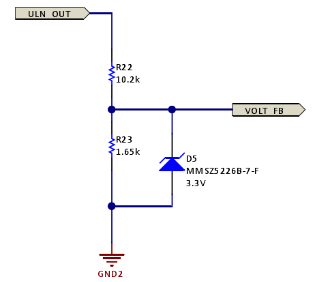
制動器電壓反饋電路原理圖
(7)電源
1)使用LMZ14201生成3.3V電壓
LMZ14201是一個用于為初級側(cè)供電的降壓型直流/直流電源模塊。此器件通常用于將較高的直流電壓轉(zhuǎn)換為較低的直流電壓,最大輸出電流為1A。本設(shè)計使用LMZ14201將24V輸入電壓轉(zhuǎn)換為3.3V,從而為隔離器的初級側(cè)和MCU供電。下圖顯示了LMZ14201的電路。
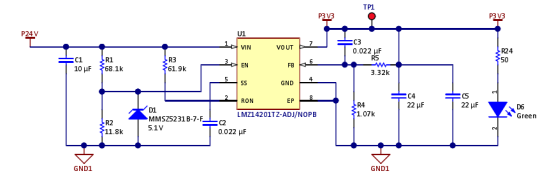
使用LMZ14201生成3.3V電壓的原理圖
輸出電壓由VO和地而之間連接的兩個電阻器組成的分壓器決定。分壓器的中點連接至FB輸入端。FB電壓與0.8V內(nèi)部基準(zhǔn)進(jìn)行比較。在正常運行狀態(tài)下,當(dāng)FB引腳上的電壓降至0.8V以下時,將啟動接通時間周期。主要的MOSFET接通時間周期會導(dǎo)致輸出電壓升高,并導(dǎo)致FB上的電壓超出0.8V。只要FB上的電壓高于0.8V,接通時間周期就不會出現(xiàn)。
穩(wěn)壓輸出電壓由外部分壓電阻器R5和R4決定:
整理各項,可實現(xiàn)所需輸出電壓的兩個反饋電阻器的比值為:
所選電阻器的阻值必須在1.OkS2至1 O.OkS2范圍內(nèi)。本參考設(shè)計使用3.32k的R5和1.07k的R4來生成3.3V的輸出電壓。
2)使用TPS7B6933生成3.3V電壓
次級側(cè)上的數(shù)字隔離器需要一個3.3V的電源來為其供電。因此,本設(shè)計中使用TPS7B6933將24V轉(zhuǎn)換為3.3V,從而為隔離器的次級側(cè)和高側(cè)開關(guān)供申。下顯示了TPS7B6933的申路。
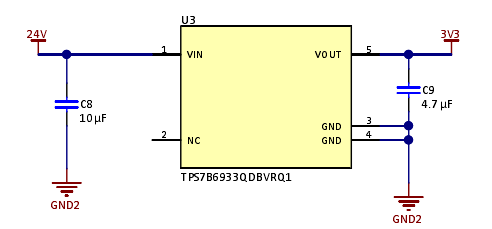
使用TPS7B6933生成3.3V電壓的原理圖
5PCB布局
下圖是PCB的俯視圖。該圖中突出標(biāo)示了高側(cè)和低側(cè)開關(guān)。
PCB的俯視圖
PCB布局建議:
下圖分別顯示了隔離層和接地劃分。初級側(cè)和次級側(cè)銅軌通過隔離層彼此隔離。初級側(cè)和次級側(cè)之間保持著4mm的銅軌間爬電距離。兩個20引腳連接器J3和J4相距20mm,可連接至C2000LaunchPad。電源平而被劃分為3.3V和24V平面。
接地平面分為兩個平面:GND1和GND2o GND1用作IS07142的初級側(cè)和LM 14201器件的接地。GND2用作IS07142的次級側(cè)、TPS27S100, ULN2003A和TPS7B6933器件的接地。
-
機器人
+關(guān)注
關(guān)注
211文章
28597瀏覽量
207832 -
伺服驅(qū)動器
+關(guān)注
關(guān)注
22文章
488瀏覽量
31708 -
緩沖電路
+關(guān)注
關(guān)注
1文章
75瀏覽量
20240
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論