 PAM4信號的一些測試和測量方面的挑戰
PAM4信號的一些測試和測量方面的挑戰
PAM4編碼提供了串行加倍比特率的優勢數據通道,通過將電壓電平從2增加到4來實現。這是一個相當復雜的調制方案,所以毫無疑問它會帶來一些測試和測量方面的挑戰。
想象一下,如果你愿意的話,可以使用普通的NRZ眼圖,這是一個理想的調整方案。它沒有抖動,只有有限的上升和下降時間。
PAM4信號討論中經常出現的第一件事是:如何恢復時鐘?在NRZ信號的情況下,時鐘恢復的目的是精確定位交叉點或信號超過閾值的位置(參見圖1中左側的綠色圓圈) 。
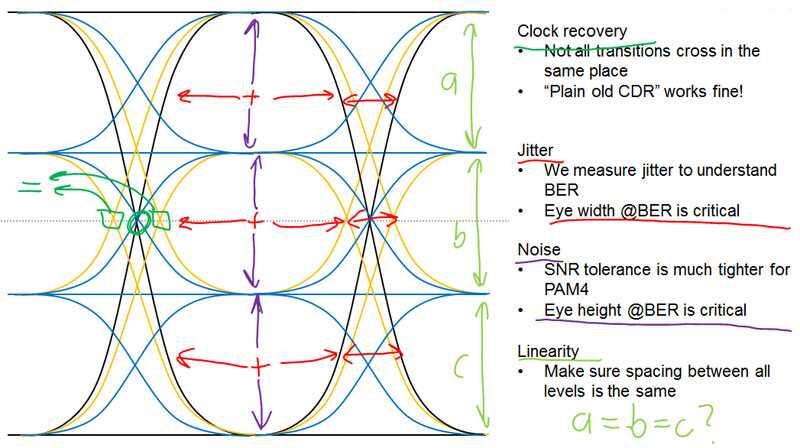
圖1PAM4信號帶來的主要測試挑戰
使用PAM4信號時,它是一個類似的情況除了有四個電壓電平而不是兩個電壓電平的事實。兩個中間級別意味著更多的信號轉換:從底層到下一層更高,從第三層到第三層,從第三層到頂部(藍色軌跡c,b和a分別) ,在圖)中。
藍色跡線b與覆蓋整個幅度范圍的黑色跡線(在綠色圓圈處)相交。有些轉換根本不會超過任何閾值(頂部和底部三分之一處的藍色跡線),但可能沒有那些轉換超過閾值的轉換數量。因此,考慮到這些轉換,可以假設傳統的時鐘恢復是足夠的。但是然后有從底層到第二層的轉換,從頂層到第二層的轉換(黃色跡線)。即使在完美的世界中,這些過渡也不會在與其他過渡相同的地方(綠色圓圈)超過閾值。因此,問題是這些轉變是否會影響時鐘恢復?它們會導致時鐘抖動嗎?
答案是“不是真的”。如果我們假設綠色圓圈的左右兩側的過渡數量大致相等,并且比綠色圓圈中的任何一個過渡更多,那么左右兩個黃色交叉點相互抵消。傳統的時鐘恢復工作正常。
說到抖動,那些黃色交叉口與綠色圓圈的理想交叉位置的接近確實引發了問題。參考圖右側的小紅色箭頭,如果習慣于分析NRZ信號,那些時間間隙確實看起來像抖動。
如何分析抖動PAM4信號?首先,讓我們不要忘記分析抖動的最終目的,即確定我們預測的誤碼率。我們想知道我們需要對信號進行采樣以最大限度地減少誤碼(理想情況下,在三只眼睛中心的紅色十字處)。因此,我們真正關心的是眼睛寬度和接收器中采樣器的位置。構建眼睛的軌跡數量不是問題,而是在給定誤碼率下的眼睛寬度,而不是對交叉口正在發生的情況進行深入分析。另一個挑戰是PAM4領域是噪音容限。我們擁有33%的幅度,而不是具有完整的幅度范圍。因此,噪聲分析變得更加重要。正如我們想要了解給定BER下的眼寬以了解水平采樣器的最佳位置,我們還需要知道垂直放置它的位置。給定BER下的眼高是另一個關鍵參數。最后,與NRZ相比,PAM4的某些新特性是線性概念。在NRZ中,只有兩個振幅水平需要擔心,而PAM4給出了這兩個中間振幅水平。距離a,b和c是否相同,以便水平均勻分布,我們所有三只眼睛都有最大開口? a = b = c嗎?這就是PAM4背景下“線性”的含義。
-
PCB打樣
+關注
關注
17文章
2968瀏覽量
21695 -
華強PCB
+關注
關注
8文章
1831瀏覽量
27749 -
pam4
+關注
關注
2文章
36瀏覽量
14422 -
華強pcb線路板打樣
+關注
關注
5文章
14629瀏覽量
43034
發布評論請先 登錄
相關推薦
泰克53GBd PAM4電測試方案亮相OFC2022

泰克將推最全面的400G PAM4成套測試解決方案
PAM4設計挑戰及其對測試的啟示
一分鐘了解下一代數據中心高速信號互聯技術 PAM4
400G AOC產品的核心技術PAM4和DSP
基于PAM4調制的400G光模塊解析
本周推薦:關于200G PAM4光模塊(推薦分享)
問答專欄丨PAM4常見問題解答
泰克助力實現400G PAM4電接口自動化測試

如何測試PAM4信號

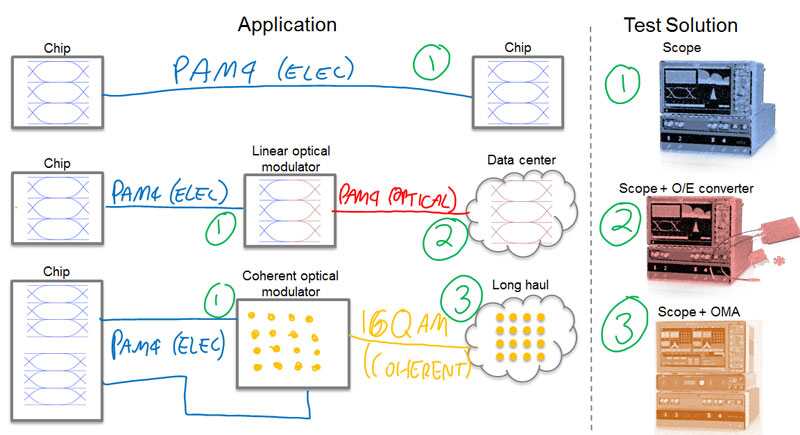
PAM4找到應用程序的一些方式及PAM4測試設置因應用程序而異
關于NRZ與PAM4信號差異
AMD Versal自適應SoC GTM如何用XSIM仿真和觀察PAM4信號






 工商網監
工商網監
評論