


什么是 Field Oriented Control
永磁同步電機(jī)(PMSM, Permanent Magnet Synchronous Motor)由于它噪聲小、高效節(jié)能的顯著優(yōu)勢(shì),廣泛被用于新能源汽車、機(jī)器人伺服和家電等領(lǐng)域。
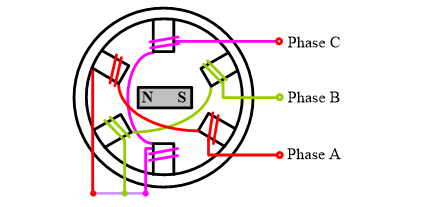
上圖是一個(gè)PMSM的示意圖,ABC 為三相交流電,外圈為定子(顧名思義就是保持不動(dòng)),內(nèi)部可以旋轉(zhuǎn)的叫轉(zhuǎn)子(可以旋轉(zhuǎn))。轉(zhuǎn)子為永磁體(permanent magnet)。當(dāng)定子線圈通上 ABC 三相交流電后,由于電磁效應(yīng)帶動(dòng)轉(zhuǎn)子轉(zhuǎn)動(dòng),而轉(zhuǎn)子轉(zhuǎn)動(dòng)的頻率和 ABC 三相交流電的頻率相同,所以叫同步電機(jī)(synchronous motor)。
和 PMSM 非常相似的一種電機(jī)叫做 BLDC Motor(直流無(wú)刷電機(jī),Brushless DC)。它們顯著的區(qū)別在于反電動(dòng)勢(shì)(back EMF)的波形。BLDC 的反電動(dòng)勢(shì)呈梯形狀,而 PMSM 的反電動(dòng)勢(shì)呈正弦波狀。這兩者的差異的原因是由于 PMSM 的定子繞組線圈纏繞呈正弦分布,而 BLDC 的定子繞組線圈纏繞為集中式。下面的動(dòng)圖展現(xiàn)了 BLDC 和 PMSM 在控制上的差異:
淺藍(lán)色箭頭代表轉(zhuǎn)子的磁場(chǎng)矢量方向,可以看到藍(lán)色箭頭在 BLDC 和 PMSM 都是在不停旋轉(zhuǎn),并且這個(gè)旋轉(zhuǎn)會(huì)產(chǎn)生力矩(torque)帶動(dòng)機(jī)械負(fù)載的運(yùn)動(dòng)。BLDC 的轉(zhuǎn)子旋轉(zhuǎn)是一頓一頓的,PMSM 的轉(zhuǎn)子旋轉(zhuǎn)是非常連續(xù)平滑。控制 BLDC 的最經(jīng)濟(jì)的方法是 6 步換向法。通常通過(guò)檢測(cè)轉(zhuǎn)子角度位置,來(lái)依次給定子換向,這樣的換向,造成了輸出力矩有波動(dòng)。而 PMSM 通過(guò) FOC 控制,不需要換向,可以使得轉(zhuǎn)子保持連續(xù)、平滑的轉(zhuǎn)動(dòng)。
這樣的“平滑”效應(yīng)就是 Field Oriented Control(FOC)的結(jié)果。定子三相交流電流生成的空間磁場(chǎng)向量,通過(guò)控制驅(qū)動(dòng)轉(zhuǎn)子磁場(chǎng)旋轉(zhuǎn),形成力矩– 這就是 Field Oriented Control(磁場(chǎng)定向控制)。
MTPA(最大力矩電流比控制,Maximum Torque Per Amp)
永磁同步電機(jī)一般分為兩種:SPM(表貼式)和 IPM(內(nèi)嵌式)。從控制的角度 SPM 要比 IPM 簡(jiǎn)單很多,我們先以 SPM 為例,暫不考慮弱磁(一種高轉(zhuǎn)速情況下的控制方法)。如果我們的目標(biāo)是“相同的電流輸入,達(dá)到最大的輸出力矩”。假設(shè)下圖中上下端是定子,中間的是轉(zhuǎn)子。讓我們?nèi)藶楦淖兌ㄗ哟艌?chǎng)矢量和轉(zhuǎn)子磁場(chǎng)矢量的夾角,當(dāng)夾角為 0 度的時(shí)候,沒(méi)有輸出任何力矩,因?yàn)榇判缘哪媳睒O互相吸引。再讓我們旋轉(zhuǎn)轉(zhuǎn)子,改變一下夾角,會(huì)覺(jué)得力矩增大。當(dāng)定子和轉(zhuǎn)子磁場(chǎng)向量成 90 度的時(shí)候,產(chǎn)生的力矩最大。
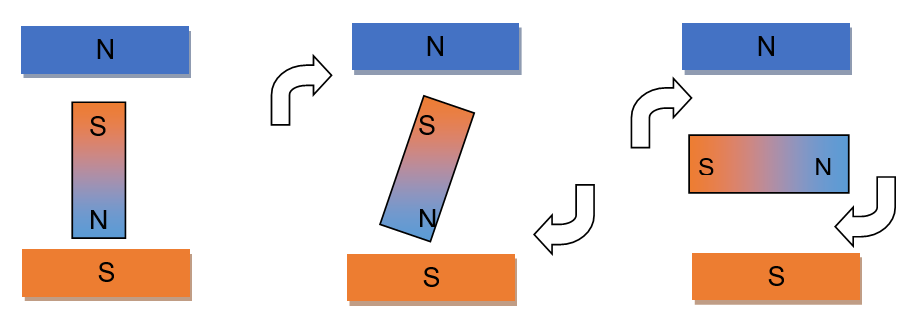
這是我們想達(dá)到的效果 – 最大化電流的利用效率,我們稱之為:MTPA(Maximum Torque Per Amp)。
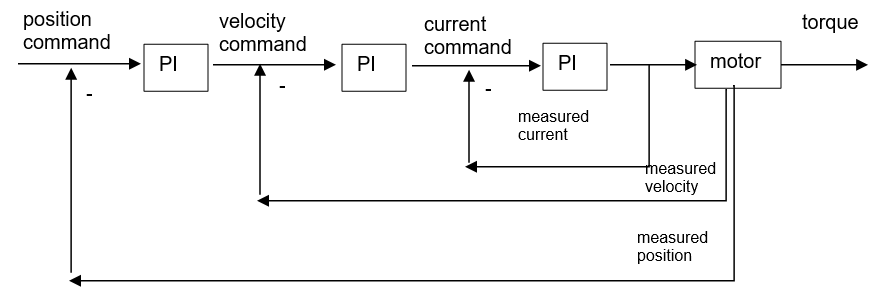
在這種狀態(tài)下,輸出的力矩和輸入的電流幅度成正相關(guān)。我們只需要調(diào)整電流的幅值,就可以控制電機(jī)輸出的力矩。如果我們需要根據(jù)反饋來(lái)調(diào)整電機(jī)的電流、速度和位置,可以通過(guò)三個(gè) PI 控制器的級(jí)聯(lián)的電流環(huán)、速度環(huán)和位置環(huán)來(lái)實(shí)現(xiàn)。但最終,還是通過(guò)對(duì)電流的控制來(lái)實(shí)現(xiàn)。
通過(guò)上面的介紹,我們可以把 ABC 三相交流電形成的磁場(chǎng),看著一個(gè)矢量。FOC 最重要的原則就是使這個(gè)電流矢量和永磁體轉(zhuǎn)子轉(zhuǎn)動(dòng)形成的磁場(chǎng)矢量保持垂直。由于轉(zhuǎn)子是在不停的轉(zhuǎn)動(dòng),F(xiàn)OC 的任務(wù)就是:
不停的觀測(cè)轉(zhuǎn)子的角度
將電流矢量的角度保持和轉(zhuǎn)子磁場(chǎng)矢量垂直(MTPA)
大家都知道 ABC 是一個(gè)三相交流電:
上圖右側(cè)是 ABC 三相交流電的示意圖。三種顏色代表三相交流電 ABC。它們的相位差為 120 度,我們可以把它們表示為上圖左側(cè)的矢量形式(abc 矢量坐標(biāo)系)。它們合成的總矢量是淡藍(lán)色。
為了研究方便,我們將靜止的 abc 坐標(biāo)系變?yōu)殪o止的 αβ 坐標(biāo)系,這一步也叫 Clarke 變換:
接著,我們將靜止的 αβ 坐標(biāo)系變?yōu)樾D(zhuǎn)的 dq 坐標(biāo)系,這一步也叫 Park 變換:
在經(jīng)歷 Clarke-Park 變換后,三相交流電變成了“直流電”:Id(深藍(lán))和Iq(紅色),它們實(shí)際上是電流矢量在 dq 坐標(biāo)系的投影。d 表示 direct(直接),q 代表了 quadrature(正交)。如果是 SPM,為了使得電流效率最高(MTPA),我們只要使 Id = 0,即所有的電流都作用于正交 – 產(chǎn)生力矩。這樣大大簡(jiǎn)化了控制。
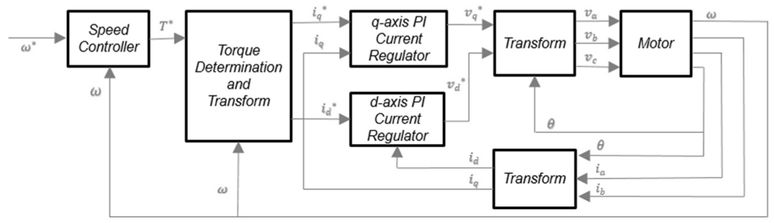
我們通過(guò)控制 Id、Iq 去產(chǎn)生相應(yīng)的 Vd、Vq,經(jīng)過(guò)反 Park/Clarke 變換和 SVPWM(Space Vector Pulse Width Modulation)調(diào)制電壓信號(hào),經(jīng)過(guò)門驅(qū)動(dòng)(Gate Driver)和逆變器(Inverter)產(chǎn)生三相電壓 Va、Vb、Vc,最后將 Va、Vb、Vc 輸入到 PMSM,完成了 FOC。
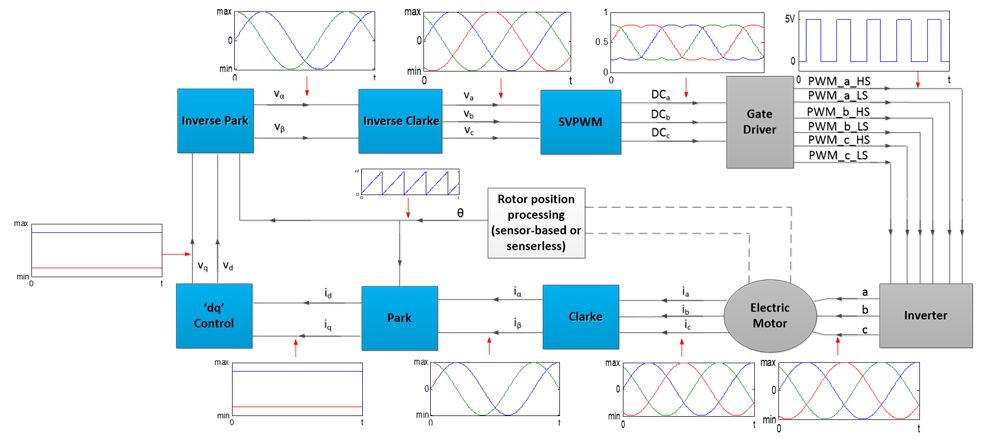
上圖是 FOC 的控制信號(hào)示意圖,其中藍(lán)色的模塊是軟件實(shí)現(xiàn)模塊,灰色的為硬件部分。
我們經(jīng)常聽(tīng)到,電流環(huán)的的控制周期為 100us(10K Hz)。通常來(lái)說(shuō),上面的藍(lán)色部分一般在 DSP 或者 MCU 的 ISR(interrupt service routine,中斷服務(wù)程序)中實(shí)現(xiàn)。也就是說(shuō),每隔 100us,DSP 或者 MCU 就有專門的 ISR 函數(shù)做如下處理動(dòng)作:
測(cè)量出轉(zhuǎn)子的角度(θ),得出所需的 Id、Iq 電流。將所需要的 Iq 電流向量和該角度保持垂直。在 MTPA 情況下,如果是 SPM,所需 Id 設(shè)為 0。
測(cè)量出實(shí)際相電流(Ia、Ib、Ic),通過(guò) Clarke/Park 變換產(chǎn)生實(shí)際 Id、Iq 電流。
利用上述的所需電流和實(shí)際電流信號(hào)差,通過(guò) PI 控制器,得出 Vd、Vq。
經(jīng)過(guò)反 Park/Clarke 變換、SVPWM 產(chǎn)生占空比,交給逆變器生成 Va、Vb、Vc 驅(qū)動(dòng)電機(jī)。
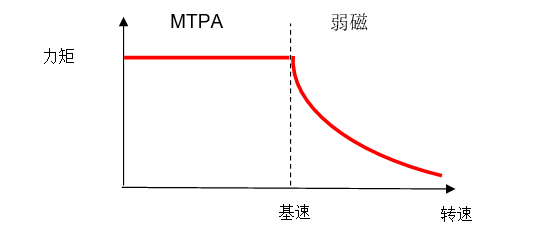
弱磁控制(flux-weakening)
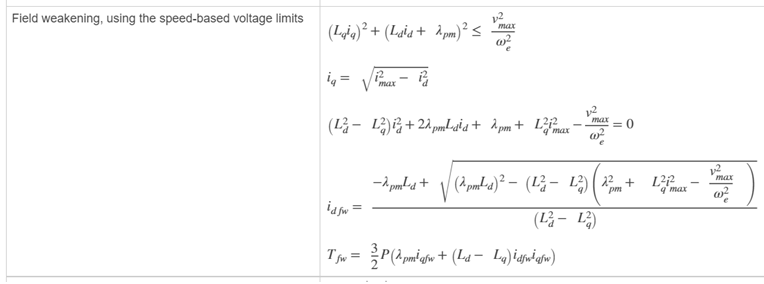
在上面過(guò)程中,我們沒(méi)有考慮轉(zhuǎn)子對(duì)定子的影響。電機(jī)的永磁體轉(zhuǎn)子,在電磁作用的影響下,旋轉(zhuǎn)產(chǎn)生反電動(dòng)勢(shì)(back EMF)。當(dāng)轉(zhuǎn)速達(dá)到一定程度(通常叫基速),加載在定子的反電動(dòng)勢(shì)足以抵消施加的正向電壓。這種情況下,必須改變 Id 和 Iq,使得電流矢量和轉(zhuǎn)子磁場(chǎng)向量的夾角不再是 90 度。簡(jiǎn)單的說(shuō),就是通過(guò)犧牲力矩來(lái)獲取高轉(zhuǎn)速。這就是弱磁控制。
下圖為 flux-weakening 的示意圖:整個(gè)電機(jī)控制區(qū)域可以分為 MTPA 和 flux-weakening 兩塊,當(dāng)轉(zhuǎn)子轉(zhuǎn)速達(dá)到基速時(shí)候,進(jìn)入 flux-weakening 區(qū)域。
表貼式(Surface Mounted Permanent Magnet,SPM)和內(nèi)嵌式(Interior Permanent Magnet,IPM)永磁同步電機(jī)
永磁同步電機(jī)一般分為兩種:SPM 和 IPM。
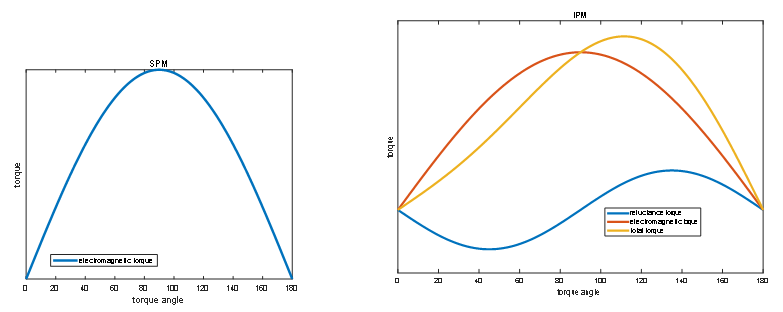
我們看一下它們的區(qū)別:SPM 將磁鋼貼在轉(zhuǎn)子表面,而 IPM 將磁鋼嵌至轉(zhuǎn)子內(nèi)部。SPM 只有一種力矩 – electromagnetic torque(電磁力矩);IPM 有兩種力矩 electromagnetic torque(電磁力矩)和 reluctant torque(磁阻力矩),IPM 的總力矩是電磁力矩和磁阻力矩的總和。
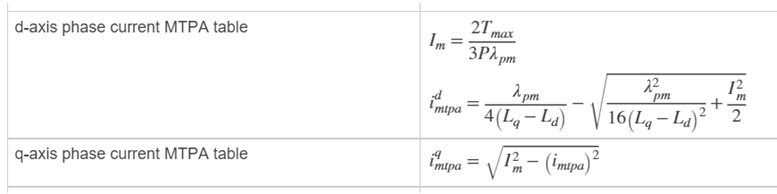
我們上面說(shuō)的,在 MTPA 情況下 Id=0 的那種電機(jī)就是 SPM,左下圖表示了其 torque angle(Id 和 Iq 合成的電流矢量和 d 軸夾角)和力矩之間的關(guān)系。當(dāng) torque angle 為 90 度的時(shí)候,力矩最大。此時(shí) Id =0。由于 Iq 永遠(yuǎn)和 Id 垂直,MTPA 的時(shí)候,torque angle 就是 90 度。
而 IPM 在 MTPA 的情況下,torque angle 并非是 90 度,而是大于 90 度(見(jiàn)右下圖的黃線最頂端)。并且,這個(gè)角度隨著電流的變化而變化,并非一個(gè)固定值。Id 也不等于 0。如果 reluctant torque 是一條直線(值為 0),IPM 就變成 SPM。
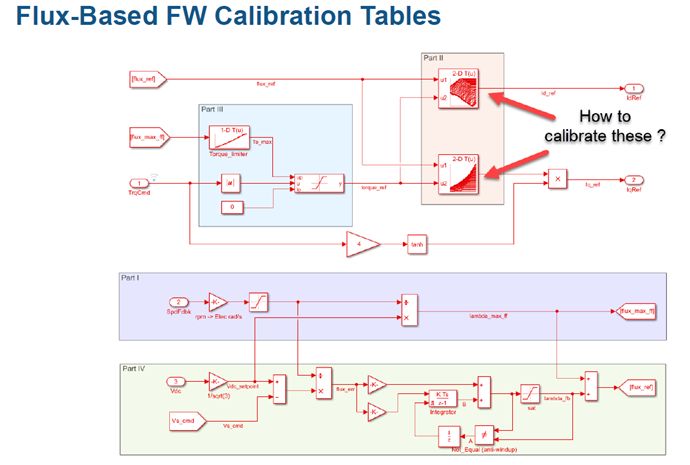
一般來(lái)說(shuō),大部分 SPM 的控制只考慮 MTPA 控制,比較簡(jiǎn)單 – 即將 Id 設(shè)為 0。而 IPM 需要考慮 MTPA 和弱磁控制。IPM 的 MTPA 和弱磁控制,常常通過(guò) LUT(look-up table,查表)放在控制策略中。用戶只需根據(jù)當(dāng)前的力矩指令和轉(zhuǎn)速,或者通過(guò)轉(zhuǎn)速換算得到的磁鏈值和力矩指令,查找對(duì)應(yīng)的 Id、Iq。然后通過(guò) PI 控制器算出所需的 Vd、Vq。
下圖為一個(gè)查表的示例:
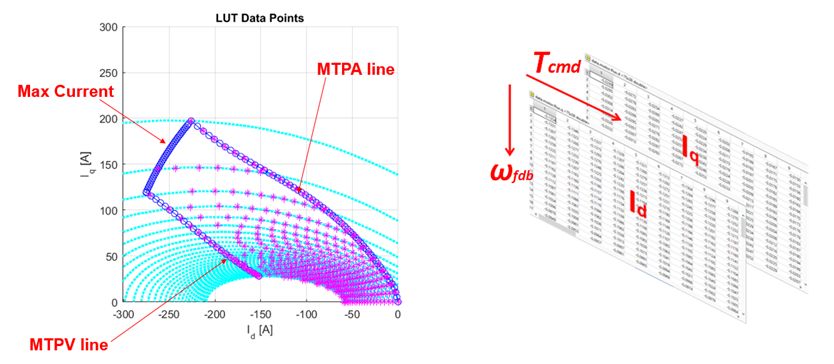
紫色的點(diǎn)即 LUT 中對(duì)應(yīng)的 Id、Iq 點(diǎn),這些點(diǎn)受電壓橢圓、電流圓、MTPA 線、MTPV 線的限制。具體細(xì)節(jié)請(qǐng)參閱:
https://www.mathworks.com/company/newsletters/articles/designing-a-torque-controller-for-a-pmsm-through-simulation-on-a-virtual-dynamometer.html
被控對(duì)象模型
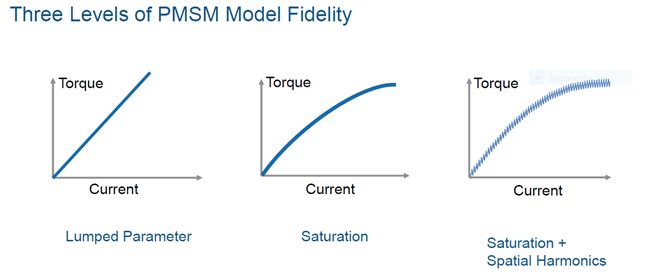
Simulink 提供三種不同精度的永磁同步電機(jī)被控對(duì)象模型:
線性模型 – 力矩和電流為線性方程
非線性飽和模型 – 力矩和電流的關(guān)系為非線性飽和型
飽和加空間諧波模型– 力矩和電流的關(guān)系為飽和加空間諧波型
線性模型的建立
Simulink 中的 Simscape Electrical 以及 Powertrain Blockset 都提供了線性模型供設(shè)計(jì)參考。
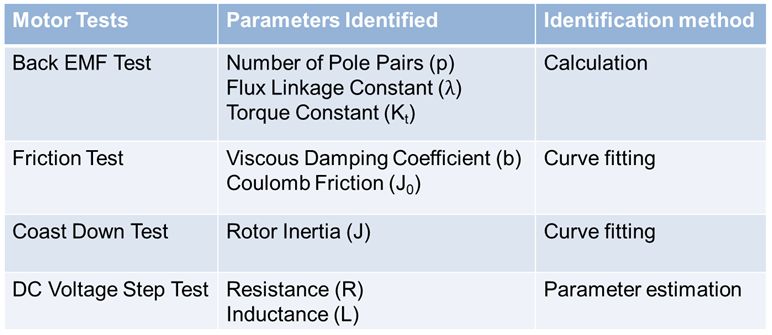
線性模型所需參數(shù):
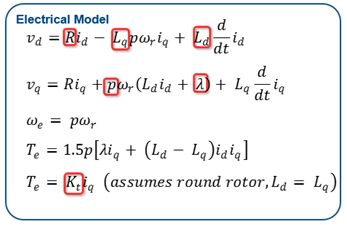
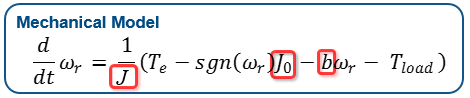
如何獲取這些參數(shù):
非線性飽和模型的建立
Simulink 中的 Powertrain Blockset 提供了非線性飽和模型供設(shè)計(jì)參考。用戶可通過(guò)兩種方式獲取數(shù)據(jù)后填充這些模型(即填充 Nonlinear Flux - Current表格)。
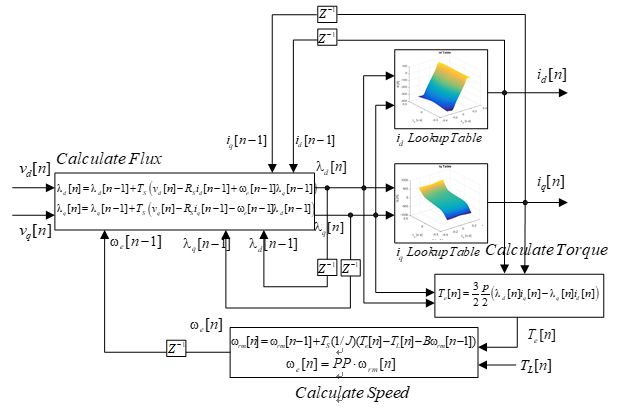
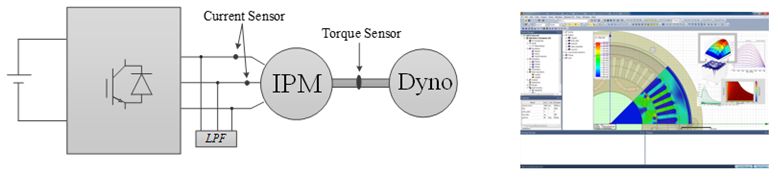
這兩種獲取數(shù)據(jù)方式為電機(jī)臺(tái)架測(cè)試(Dyno Testing)和有限元分析(FEA)。
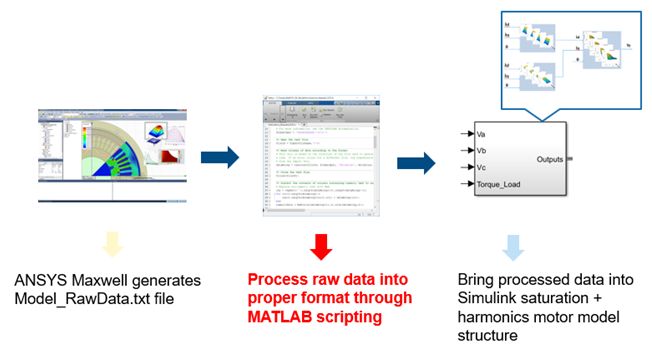
飽和加空間諧波模型
飽和加空間諧波模型的建立只有通過(guò) FEA(有限元分析)的方式獲得,Simulink Powertrain Blockset 的為用戶提供了:
基本的飽和加空間諧波模型的 Simulink 模型框架
通過(guò)不同 FEA(ANSYS,JMAG等)工具獲取數(shù)據(jù)后的處理腳本(處理導(dǎo)入數(shù)據(jù)至模型框架)

控制部分
TI C2000 示例 – SPM 控制器
Simulink 提供了基于 TI C2000 的 SPM 控制器的開(kāi)發(fā)示例,包含了基本的 FOC 算法以及產(chǎn)生 SVPWM 占空比。用戶可在模型仿真的基礎(chǔ)上,產(chǎn)生應(yīng)用層C代碼。應(yīng)用層代碼通過(guò)調(diào)用底層驅(qū)動(dòng)模塊,在 TI CCS 環(huán)境下編譯鏈接,并可直接運(yùn)行在 TI C2000 平臺(tái)上。
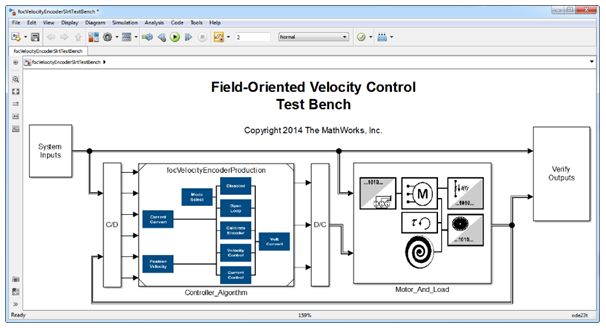
這個(gè)示例提供了三種功能:
桌面仿真——被控對(duì)象為簡(jiǎn)單的線性模型,在接受到 SVPWM 占空比信號(hào)后,通過(guò)逆變器產(chǎn)生相電壓驅(qū)動(dòng)電機(jī),并通過(guò)絕對(duì)編碼器將位置信號(hào)反饋到控制器。
代碼生成——將 FOC 和 SVPWM 占空比信號(hào)生成部分產(chǎn)生 C 代碼,嵌入到 TI C2000 的 ISR 中。
性能比較——將 C2000 中運(yùn)行的實(shí)時(shí)電機(jī)控制數(shù)據(jù)導(dǎo)入模型,進(jìn)行桌面仿真和實(shí)時(shí)運(yùn)行的性能比較。
IPM 控制器示例
在 Simulink 的 Powertrain Blockset 中有個(gè)比較詳細(xì)的 IPM 控制器示例。其中 MTPA 和弱磁控制都是基于公式推導(dǎo)。
弱磁表格
各種弱磁算法的目的都是找出一個(gè)符合實(shí)際情況的 Id、Iq 組合來(lái)實(shí)現(xiàn)控制的優(yōu)化。在實(shí)踐中,很多工程師使用 LUT(Look-Up Table)來(lái)做弱磁查表。
MATLAB/Simulink 有一個(gè) MBC(Model Based Calibration,基于模型的標(biāo)定)工具箱,可以快速、方便地根據(jù)優(yōu)化目標(biāo)和約束條件,標(biāo)定 MTPA 和弱磁控制表格。例如,約束條件:電壓橢圓限制、電流圓限制。輸出:基于速度和力矩的 Id、Iq 表;或者基于磁鏈(flux amplitude)和力矩的 Id、Iq 表。標(biāo)定數(shù)據(jù)來(lái)源,可來(lái)自于 FEA 模型或臺(tái)架實(shí)測(cè)。如果是臺(tái)架實(shí)測(cè),還可以利用 MBC 工具箱進(jìn)行 DoE(Design of Experiments)試驗(yàn),減少臺(tái)架試驗(yàn)時(shí)間,降低成本。
目前,北美多個(gè)汽車 OEM 和電機(jī)廠商正采取這種新穎的方式進(jìn)行電機(jī)弱磁表格的標(biāo)定。下篇文章,我們也將著重進(jìn)行講解。
-
磁場(chǎng)
+關(guān)注
關(guān)注
3文章
901瀏覽量
24836 -
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7256瀏覽量
91915 -
永磁同步電機(jī)
+關(guān)注
關(guān)注
28文章
878瀏覽量
50677
發(fā)布評(píng)論請(qǐng)先 登錄
無(wú)軸承異步電機(jī)氣隙磁場(chǎng)定向逆解耦控制
張飛FOC磁場(chǎng)定向控制有感、無(wú)感電機(jī)驅(qū)動(dòng)視頻課程及STM32開(kāi)發(fā)套件(共257集)
無(wú)刷直流電機(jī)磁場(chǎng)定向控制系統(tǒng)研究
無(wú)刷直流電機(jī)RBF磁場(chǎng)定向控制及監(jiān)控系統(tǒng)設(shè)計(jì)
三相永磁同步電機(jī)直接轉(zhuǎn)矩控制技術(shù)研究
無(wú)傳感器磁場(chǎng)定向控制
簡(jiǎn)體中文版 永磁同步電機(jī)磁場(chǎng)定向控制 (PMSM FOC)軟件庫(kù) V2.0
磁場(chǎng)定向控制如何優(yōu)化BLDC電機(jī)性能
使用旋轉(zhuǎn)電感式位置傳感器的三相BLDC電機(jī)的磁場(chǎng)定向控制(FOC)

Simulink自定義模塊開(kāi)發(fā)教程 Simulink 在控制系統(tǒng)中的應(yīng)用
使用TMS320C25 DSP實(shí)現(xiàn)交流電機(jī)的磁場(chǎng)定向控制
使用F2833x的三相感應(yīng)電動(dòng)機(jī)的無(wú)傳感器磁場(chǎng)定向控制
三相感應(yīng)電動(dòng)機(jī)的無(wú)傳感器磁場(chǎng)定向控制
使用CLA對(duì)3相感應(yīng)電動(dòng)機(jī)進(jìn)行無(wú)傳感器磁場(chǎng)定向控制
使用TI智能柵極驅(qū)動(dòng)器輕松實(shí)現(xiàn)無(wú)刷直流(BLDC)電機(jī)的磁場(chǎng)定向控制(FOC)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論