") 關(guān)于如何用 Simulink 設(shè)計(jì) DC/DC 轉(zhuǎn)換器的分析和介紹
關(guān)于如何用 Simulink 設(shè)計(jì) DC/DC 轉(zhuǎn)換器的分析和介紹
電力電子轉(zhuǎn)換器(Power Electronics Converter)指的是主要通過開關(guān)器件和其他電路的組合將一種形式的電源轉(zhuǎn)化成另外一種形式的電源。如下圖所示,電力電子轉(zhuǎn)換器可以將交流電轉(zhuǎn)換成直流電,也可以將直流電轉(zhuǎn)換成交流電,或者用來調(diào)節(jié)輸出電壓和頻率。
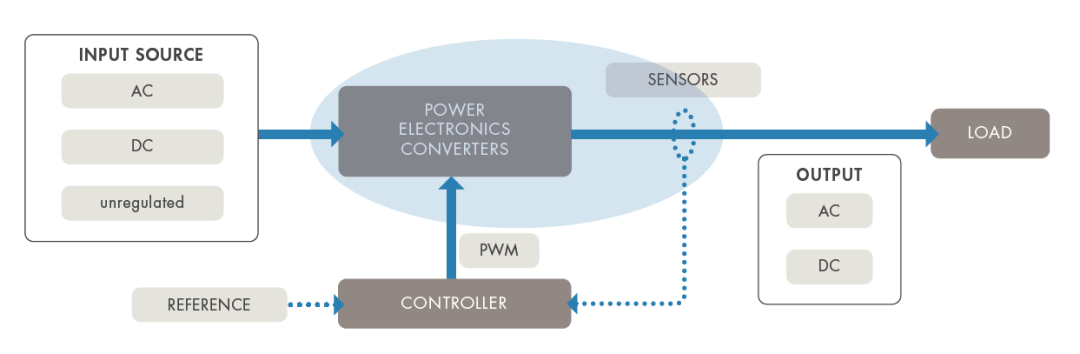
例如:電力電子轉(zhuǎn)換器可以用在新能源汽車上,將動力電池的直流電轉(zhuǎn)換成可變頻率的交流電,用來驅(qū)動電機(jī)。在風(fēng)力發(fā)電機(jī)上,電力電子轉(zhuǎn)換器將可變頻率的風(fēng)電轉(zhuǎn)換成固定頻率的交流電,送到千家萬戶。在汽車LED大燈上,通過直流電壓的轉(zhuǎn)換(DC/DC) 來控制大燈的亮度。
讓我們來看一個汽車LED大燈DC/DC的例子:
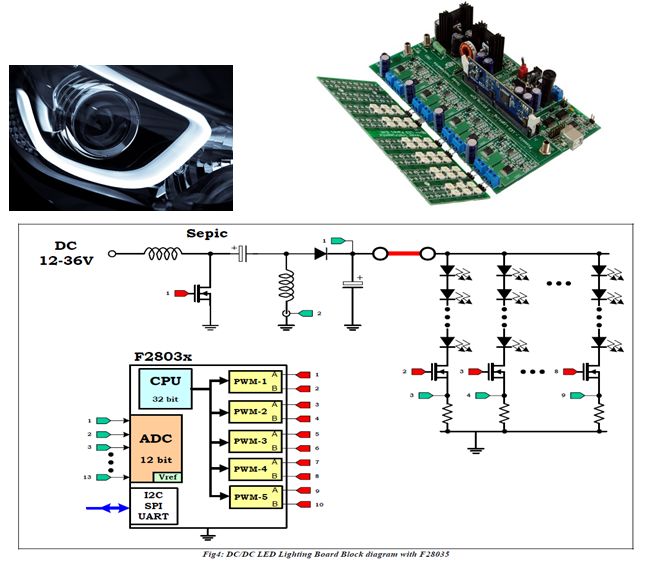
TI DC/DC LED Developer's Kit 的硬件采用了SEPIC(single endedprimary inductor converter)。它是DC/DC一種形式。硬件中有一個控制芯片,Simulink可以直接生成代碼運(yùn)行在芯片上,并控制輸出電壓。輸出電壓的高低將影響LED的亮度。PWM的頻率為100Hz。
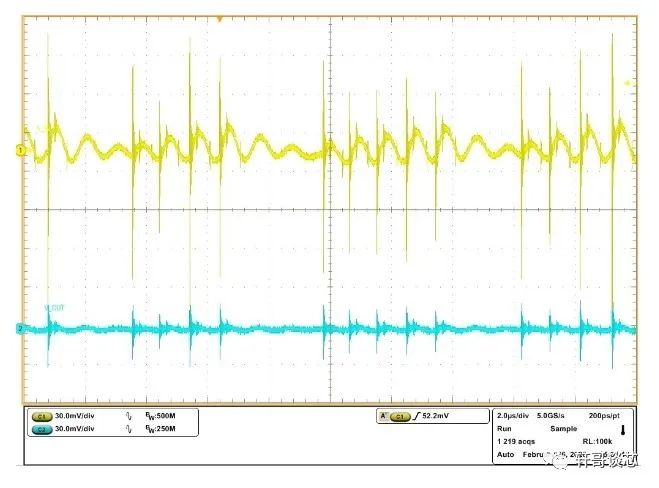
這里是系統(tǒng)最終運(yùn)行結(jié)果:
Simulink通過仿真找到PID控制器的最優(yōu)參數(shù),然后產(chǎn)生代碼到控制器,通過external mode去控制輸出電壓,從而調(diào)節(jié)LED的亮度。
在這個簡單的例子中,我們可以用Simulink來解決如下問題:
通過電路仿真,確定電子元器件件的取值,并理解不同模式下的工作行為。
對非線性電子元器件建模,并理解電路的動態(tài)熱效應(yīng)。
基于時頻域需求,設(shè)計(jì)并優(yōu)化控制器的參數(shù)。
實(shí)現(xiàn)控制器代碼,編譯、鏈接、下載到控制芯片。
電路仿真
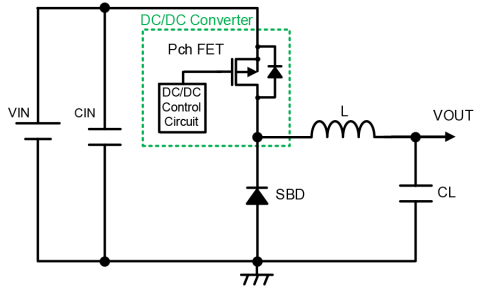
Simscape 是Simulink的物理仿真平臺,里面提供了機(jī)械、電子電氣、液壓等多種物理建模環(huán)境。基于DC/DC的等效電路,我們可以用Simscape快速搭建電路仿真模型,并通過仿真選擇合適的諸如電容、電感、電阻的值。
DC/DC運(yùn)行在連續(xù)導(dǎo)通模式(CCM)時,通過電路方程的計(jì)算,可以獲取電路電子器件的大致取值。由于我們已經(jīng)有了參考設(shè)計(jì)電路,將參考電路中各種器件的值輸入到Simscape的電路中,可以看到仿真一切正常(PWM占空比為0.5)。當(dāng)然,我們也可調(diào)整電子器件的數(shù)字,來達(dá)到獲取最優(yōu)解的目的。
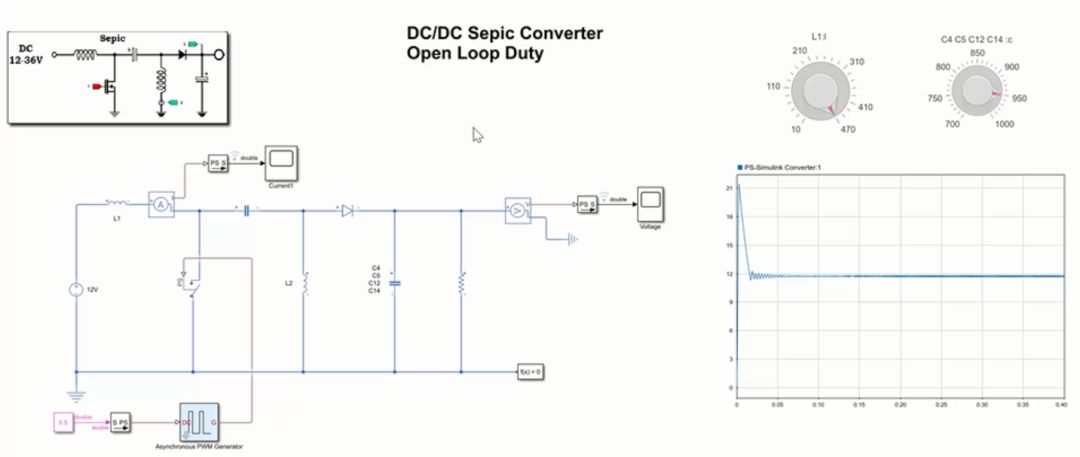
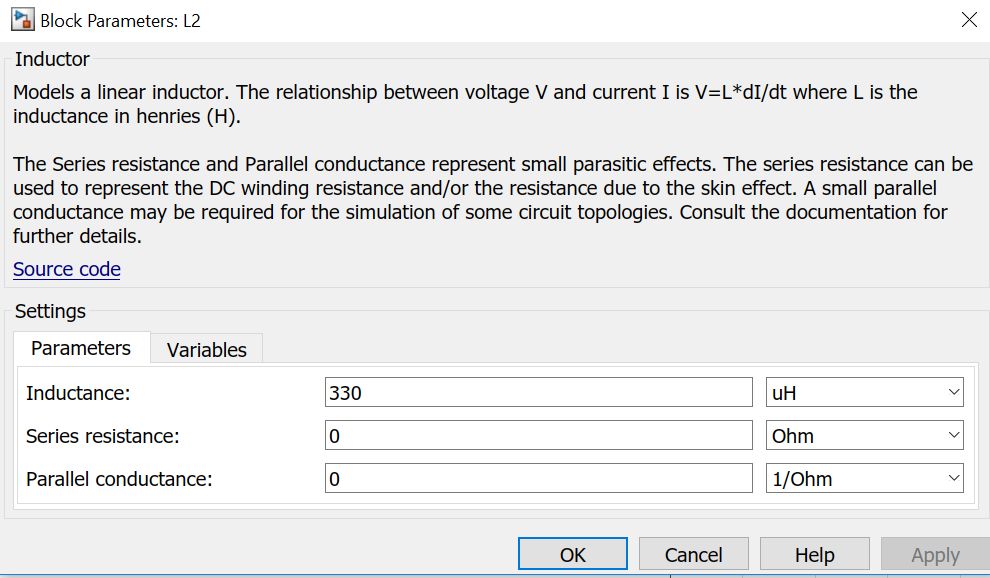
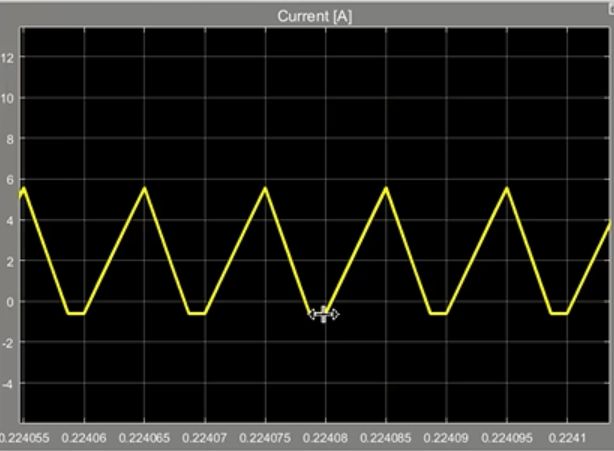
例如,我們將電感L1的取值從470μH調(diào)整到10μH,觀察發(fā)現(xiàn),輸出電壓不再取決于PWM的占空比,有其他更多的因素決定輸出電壓的高低。此時,觀察電流發(fā)現(xiàn)DCDC運(yùn)行在非連續(xù)導(dǎo)通模式(DCM)。
非線性電子元器件建模
上例中,開關(guān)器件我們選擇的是“ideal switch”,即“理想開關(guān)”。其中很多實(shí)際的開關(guān)器件的非線性因素,例如開關(guān)時間等,沒有被考慮進(jìn)去。
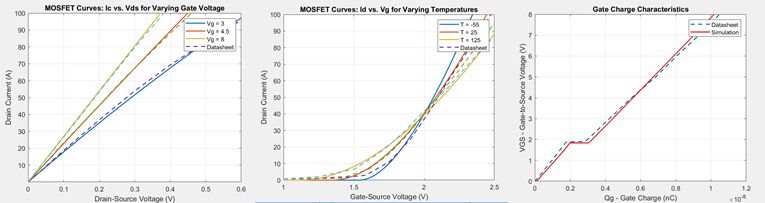
下面是真實(shí)電路設(shè)計(jì)中的MOSFET的datasheet:
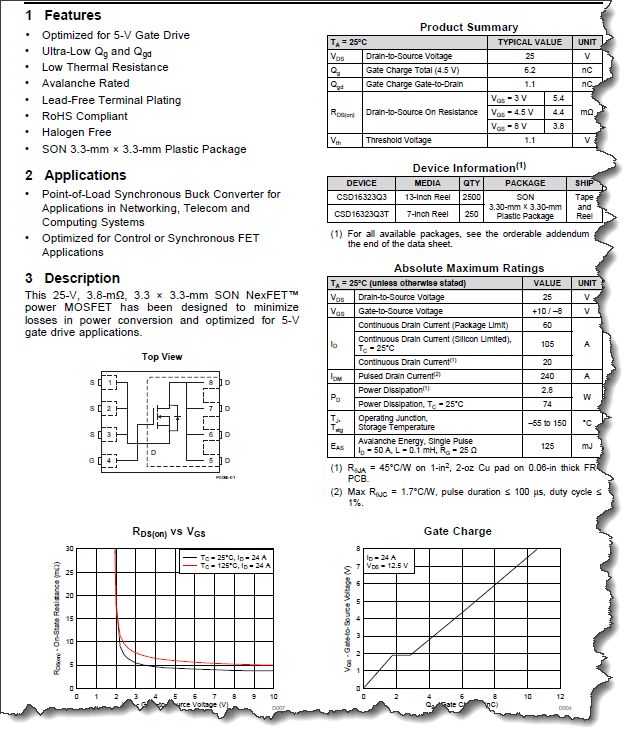
在Simscape中,可以選擇N-Channel MOSFET然后將datasheet中的動態(tài)參數(shù)手動輸入。
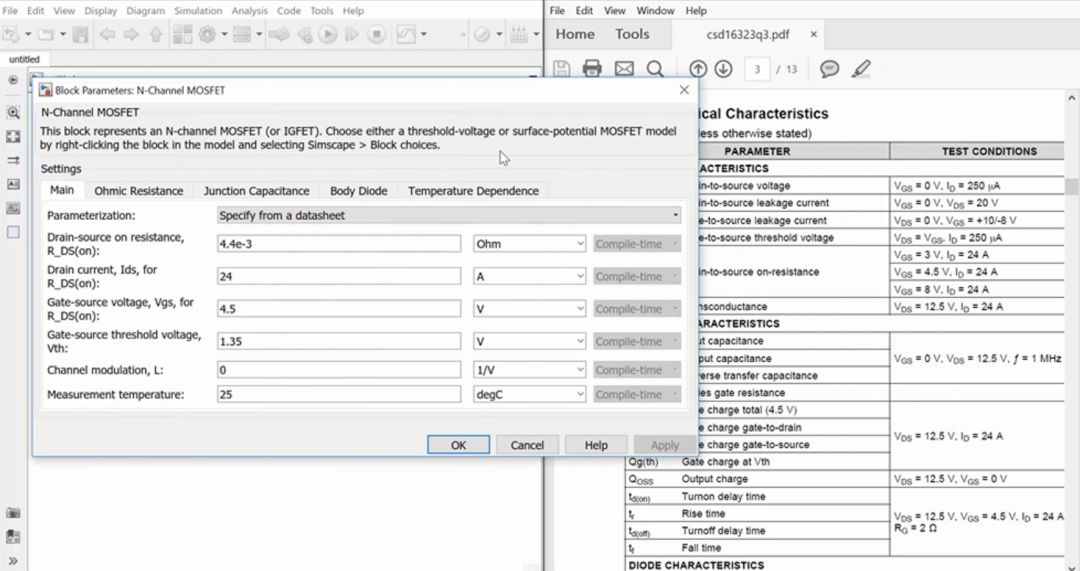
那么真實(shí)的MOSFET和我們導(dǎo)入的MOSFET有沒有差異呢?我們可以通過對比仿真看到:Gate Charge、Steady State、Transfer Characteristics等指標(biāo)高度吻合。
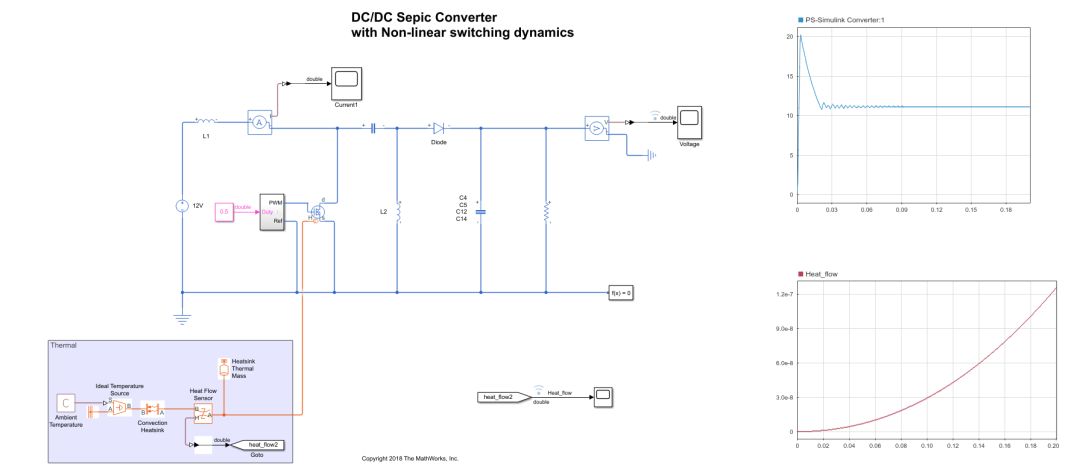
將“真實(shí)”的MOSFET替換掉先前電路中的“理想”開關(guān),并且打開它的ThermalPort -- 不但可以仿真電路的動態(tài)行為,還可以觀察熱損失動態(tài)。
控制器設(shè)計(jì)和仿真
在電子線路仿真完成后,開始設(shè)計(jì)控制部分。整個控制回路如下圖所示:
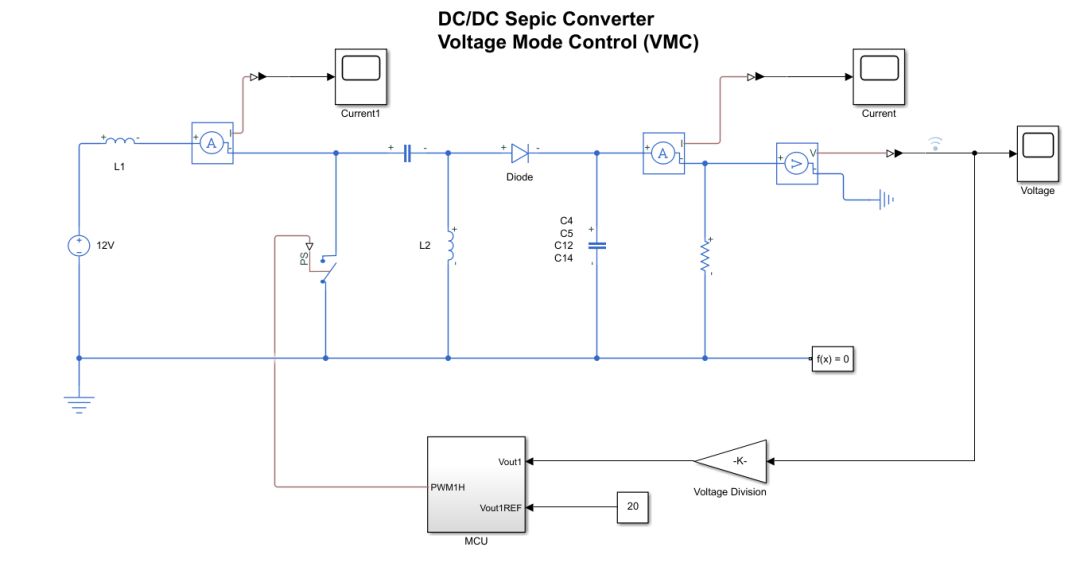
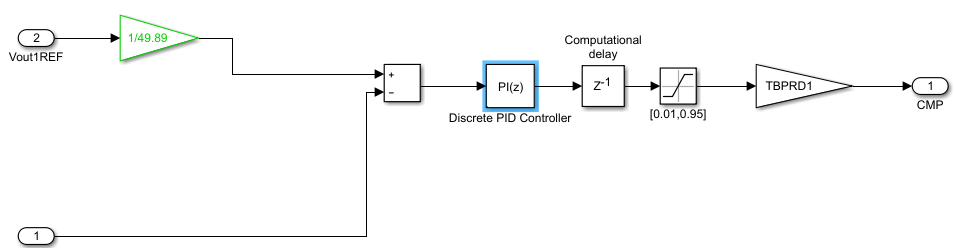
控制量是輸出電壓,被控對象是電子線路。控制的核心部分是經(jīng)典的PID控制。
控制的要求是:在0.4s內(nèi)將12伏的輸出電壓變換為27伏的輸出電壓。經(jīng)過初期的仿真,看到輸出電壓并未達(dá)到控制的精度要求:
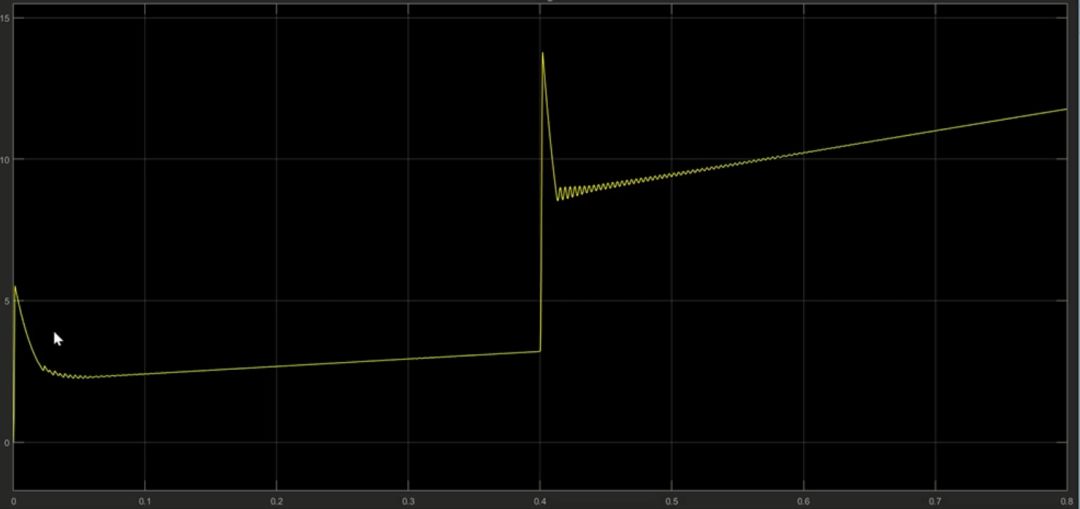
顯然,PID的參數(shù)并未調(diào)整好。Simulink有個很好用的功能: PID tuner ——可以半自動化地輔助調(diào)整PID 參數(shù)。
首先,PID tuner試圖去自動線性化被控對象。由于系統(tǒng)中有非連續(xù)性的開關(guān)器件,所以自動線性化并不成功。在新版本的Simulink中,系統(tǒng)辨識工具箱可通過Simulink仿真的輸入輸出辨識出一個新的線性化被控對象。有了線性化的被控對象,在PID tuner中可以根據(jù)控制設(shè)計(jì)需求,可視化地調(diào)整PID 參數(shù)。
讓我們看一段動圖:Simulink用一個高度從0.5 duty cycle 到0.9 duty cycle的階躍響應(yīng)作為輸入。在右上角的示意圖中,可以看到PID被臨時刪除,而階躍響應(yīng)被輸入到被控對象中,這樣可以辨識出一個線性化的被控對象傳遞函數(shù)。
系統(tǒng)辨識工具箱可以提供多種選項(xiàng)去選擇合適形式的傳遞函數(shù),比如“underdamped pair”。系統(tǒng)辨識工具箱可以自動根據(jù)所選選項(xiàng)構(gòu)造符合仿真數(shù)據(jù)的傳遞函數(shù)。下面的動圖展示了這個過程:
有了線性化的被控對象后,PID tuner就可以發(fā)揮作用了,如下面動圖所示:設(shè)計(jì)人員可以交互式地拖動圖標(biāo),找到最優(yōu)的PID參數(shù),以求達(dá)到控制性能和速度的最佳平衡。
控制器代碼生成
控制策略設(shè)計(jì)完成后,自動代碼生成是非常簡單的一步了。這時候,用戶有兩個選擇:
如果硬件有合適的硬件支持包, 例如TI C2000系列。在下載支持包后,驅(qū)動層和I/O層都有相應(yīng)的Simulink圖標(biāo),例如:
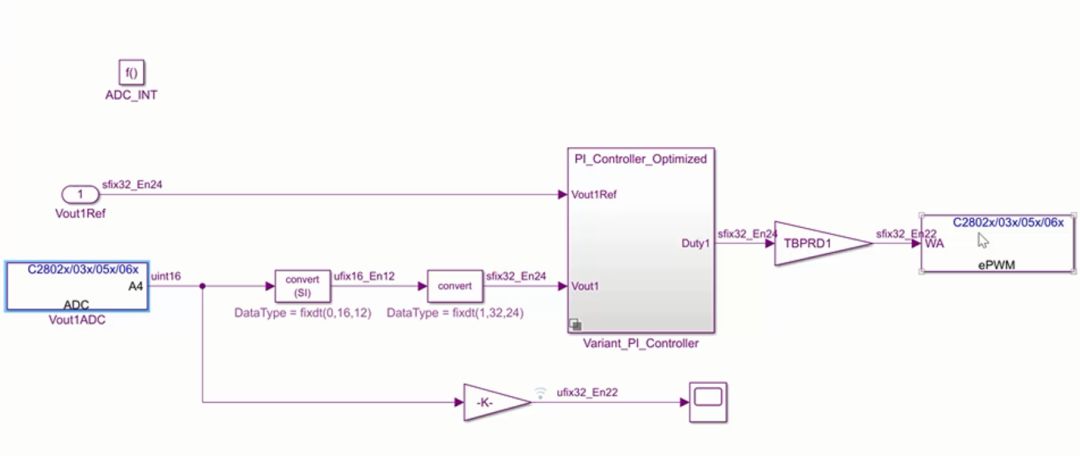
將這些連接好后,可以自動化的編譯鏈接并一鍵生成生成代碼到芯片上。
如果沒有硬件支持包,可以讓Simulink生成控制部分的代碼,手動和底層去做集成,這也是常用的辦法。
-
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8717瀏覽量
147382 -
元器件
+關(guān)注
關(guān)注
112文章
4722瀏覽量
92457 -
控制器
+關(guān)注
關(guān)注
112文章
16389瀏覽量
178442
發(fā)布評論請先 登錄
相關(guān)推薦
降壓型與升壓型DC-DC轉(zhuǎn)換器的輸出紋波有什么不同
DC/DC轉(zhuǎn)換器和DC/DC控制器的區(qū)別
什么是DC/DC轉(zhuǎn)換器?
關(guān)于XBLW MC34063 DC-DC轉(zhuǎn)換器控制電路測試分享

XC9702系列低功耗降壓DC/DC轉(zhuǎn)換器產(chǎn)品介紹

dc-dc轉(zhuǎn)換器的作用是什么
dc-dc轉(zhuǎn)換器工作原理
DC-DC轉(zhuǎn)換器控制電路大約多少錢?
降壓型DC-DC轉(zhuǎn)換器與升壓型DC-DC轉(zhuǎn)換器的輸出紋波差異

如何降低DC-DC轉(zhuǎn)換器的紋波噪聲
LDO與DC-DC轉(zhuǎn)換器的配合應(yīng)用
DC-DC轉(zhuǎn)換器電路圖 Boost升壓型DC-DC轉(zhuǎn)換器的工作原理
DC-DC電源轉(zhuǎn)換器的布局布線建議

為什么DC-DC轉(zhuǎn)換器這么有用?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論