 關于自動駕駛功能確認試驗的研究
關于自動駕駛功能確認試驗的研究
現代駕駛員輔助系統的不斷發展使得汽車駕駛自動化程度日益提升。在電子控制和調節系統得以充分保障的情況下,采用虛擬開發和試驗方法可謂是汽車開發過程中固定的組成部分。為了確立自動駕駛功能在汽車市場中的技術地位,除了穩妥可靠地實施其功能要求之外,還必須實現較高的客戶效益,因此保證駕駛的靈活性、便捷性、舒適性格外重要,同時駕駛員自身的認可也起著決定性的作用。斯圖加特汽車和車用發動機研究所與斯圖加特大學開展合作研究,并致力于使駕駛員與新型系統之間實現相互作用。
1起因
在早期開發階段要對在環軟件(SiL)和在環硬件(HiL)中的全部和部分功能進行試驗和確認。為了有效考察駕駛員與相關功能之間的相互作用,該類系統必須在被稱為在環駕駛員(DiL)的試驗中進行測試。首先,鑒于當前的技術和法律條件,在進行3~5級自動化程度的自動駕駛功能試驗時是無法由未經專門訓練的普通駕駛員在道路上進行試驗的,而在動態行駛模擬器上的虛擬行駛試驗則為早期開發階段進行經濟和無風險的重復性試驗提供了潛在的可能性。
為了在統計學范疇內獲得可進行加權統計的試驗結果,試驗過程的可重復性就顯得尤為重要:如果每種試驗車輛僅在完全相同的場景中進行對比的話,那么試驗結果即可進行評定比對。如果在試驗中使用者對車輛的操控只能產生暫時的影響,那么在該情況下進行的試驗可稱作一種特別的挑戰,因為個人行為無法對試驗過程進行充分的保障。
2動態行駛模擬器的虛擬行駛試驗
采用行駛模擬器時,應使駕駛員得到在實際道路交通中行駛的體驗,需使其感受到盡可能逼真的駕駛體驗。為了實現此類場景感受,需完全真實地模擬對駕駛員的感官刺激。圖1所示的斯圖加特行駛模擬器組合演示出了真實行駛境況中所出現的縱向及橫向加速度,在試驗期間駕駛員仿佛置身于其所熟悉并易于操縱的整車環境中,車外環境和其他交通行車人員都借助于360°目視化顯示系統投影在拱頂內壁上。
圖1 斯圖加特行駛模擬器
通過一個由實時汽車模型計算的汽車運動和在環境模擬中的行駛狀態處理,可利用車輛自身的位置來調整虛擬環境中的外部交通狀況,并描繪出相應的圖像。在環境模擬過程中,除了動態物件之外,還存在需通過的路段和道路狀況信息,因此存有完整的數據記錄,以便自動化系統和模擬傳感器能提供相應的信息。
為了借助于虛擬行駛試驗考察自動駕駛內容中面臨的問題,模擬行駛器中的相應功能必須進行轉換。調整試驗所需的功能在早期開發階段往往并不存在,而將現有的硬件或軟件組成部分集成到行駛模擬器結構中則又過于費時費錢。出于該原因,在行駛模擬器中依然使用樣機功能。
3模擬環境中不確定成分的影響
只有所有包含在虛擬試驗環境中的成分呈現出一個明確的輸入-輸出狀態時,才能確保其試驗過程具有可重復性。為了識別出不確定的影響因素,圖2中示出了用于試驗自動駕駛功能的虛擬行駛試驗中試驗裝備的組成部分,目前總共能識別兩個調節回路:在第一個調節回路中,由人操控汽車,并將控制信號傳遞到汽車上;在第二個調節回路中,則采用自動駕駛功能操控汽車,自動駕駛功能可通過傳感器模擬而提供的數據,供行駛軌跡規劃器使用。該類行駛軌跡規劃器符合汽車行駛軌跡,并由其從屬的調節功能使汽車沿著該軌跡行駛,因此自動駕駛的此類經典作用鏈被稱為傳感識別、規劃和動作。
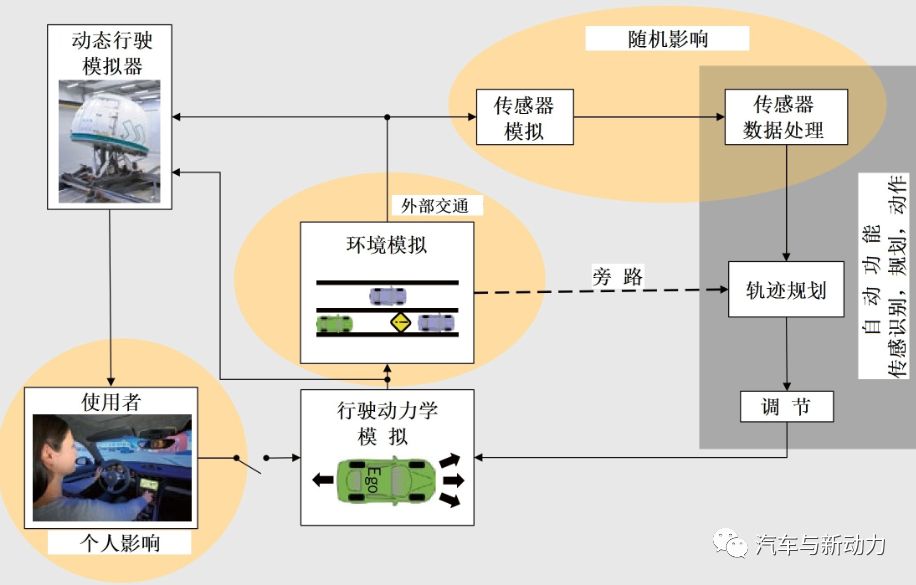
圖2 試驗方案組成部分
所示的調節回路也包含有任何時候都無法確保輸入-輸出狀態的組成部分。首先,傳感器模擬與傳感器數據的處理就屬于此類。噪聲產生的影響較為隨機,并且無法保證其為確定的系統狀態。此外,在環境模擬中會出現外界交通的干擾并需要予以控制,為了盡可能逼真地顯現出外界交通狀況,往往需采用較為復雜的模型。為此,偶然控制的外界交通對駕駛員或自動化系統的影響會引起試驗過程自身的不可重復性。
最后,甚至駕駛員本身也會呈現出較為不確定的狀態。在試驗自動化駕駛功能直至第四級自動化程度(高度自動化駕駛)時,由駕駛員短時操控汽車的步驟通常為整個試驗的組成部分。在該情況下,必須確定試驗本身具有較為重要的意義,在該階段中需確保試驗過程的進行,因此在具有重要意義的試驗階段開始前,需要首先消除對行駛有影響的因素,使其處于可重復的狀態。圖3按照采用人工和自動駕駛行駛試驗的時間流程示出了這種處理方式。
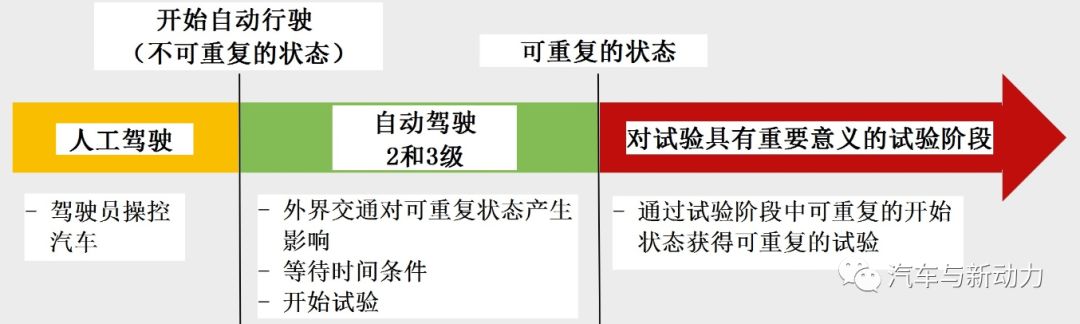
圖3 手動和自動駕駛行駛試驗的時間流程
4用于確認自動駕駛功能試驗的環境
上文所述的針對試驗過程的不確定影響因素在后文介紹的試驗環境中應盡可能減少。圖4中所示出的較為靈活并且可自由配置的試驗環境使其能演示出具有不同程度的自動駕駛功能。通常就試驗本身而言,圍繞傳感器開展的數據處理并無顯著意義,而通過旁路的行駛軌跡規劃器(見圖2)則可根據外界目標、路段屬性(道路彎道、交通標志等)以及車輛自身的狀態和位置對行駛軌跡作出選擇。所有基本真實的數據,可按照該方式準確無誤地在規劃行駛軌跡時被用作重要參考因素。通過應用理想的(無噪聲的)傳感器信號,防止隨機影響沿著傳感識別→規劃→動作作用鏈進行傳播,從而使自動化系統的狀態得以確定。
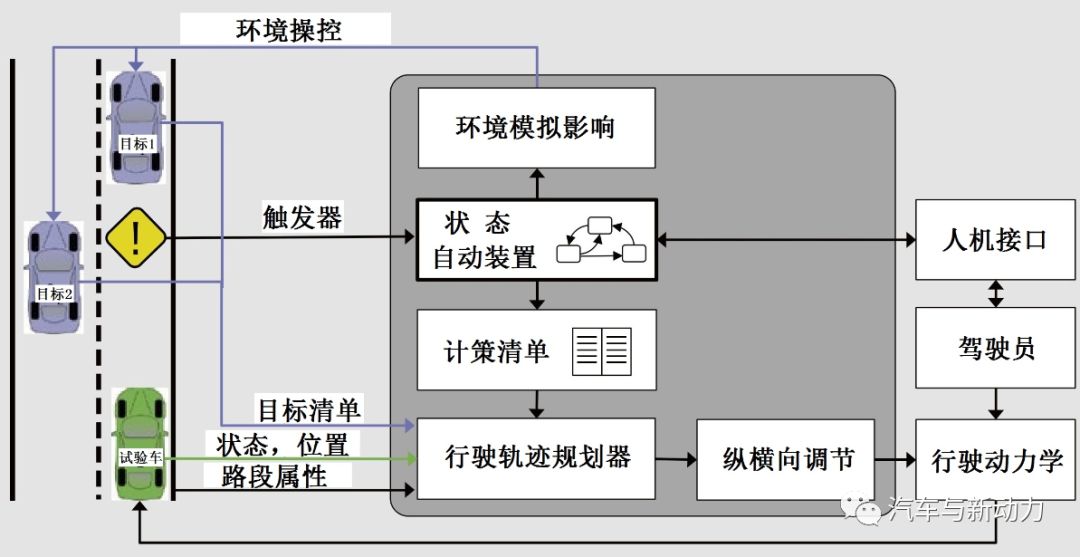
圖4 可配置試驗環境的功能圖
汽車進行自動化行駛的基本功能的調節主要取決于試驗環境。行駛軌跡規劃器在考慮到在道路規劃平面上的車輛行駛軌跡即屬于該類型,其中一個調節器承擔沿著已規劃的行駛軌跡進行縱向及橫向調節的任務。該環境的核心部分是一個可使狀態進行自由配置的自動化裝置,其中配備了試驗所需的所有系統方式,可根據人機接口(HMI)、車輛狀態或時間條件等使用者輸入參數實現狀態轉換。為了使環境模擬(路段,場景)能對狀態轉換起到影響作用,可在場景中定義其所處位置或事件觸發器。
為了能對自動化行駛車輛本身的行駛狀況產生影響,將該自動裝置的狀態與算法密切聯系起來。此類計策可用于變換車道或顯示故障狀況,并被貯存在算法清單中。若采取一個算法的話,則在行駛軌跡規劃時就要考慮到該算法。通過采用一個對環境模擬具有顯著效果的模型,即可由試驗環境對行駛場景產生影響,以便在對試驗具有重要意義的階段開始時就確立其狀態。例如可能會出現外界車輛的擾動,對試驗車輛的行為產生影響,同時需避免出現碰撞場景。
5結論和展望
上文所介紹的試驗環境可使得在進行虛擬行駛試驗時,能靈活地實現不同自動化程度的自動駕駛功能。通過消除不確定的影響因素,以確保在自動駕駛時獲得重復的試驗過程。在短時間由駕駛員操控車輛的試驗方案中,就會出現難以確定的試驗階段。由于有可能通過試驗對環境模擬產生具有針對性的影響,因此可在對試驗具有重要意義的試驗階段開始前就確立一個可重復的狀態,進而可從該時間點起,使其獲得一個確定的試驗過程。
靈活的試驗環境使其可在對駕駛員狀況影響最小的情況下采用未來的調節和通訊方案進行試驗。其中自動化程度較高的行駛尚缺乏道路交通經驗,恰好在該情況下此類方法可以確保真實的駕駛狀況,因而可使其轉換成真實的行駛場景。為了通過預先規定的試驗條件進一步減少駕駛員的影響,持續開發試驗環境。此外,行駛模擬器還要擴展其他的組成部分,以便提高行駛模擬的真實程度。
-
人機接口
+關注
關注
0文章
50瀏覽量
17308 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166386
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論