") 關于SPI繼電器驅(qū)動控制器的現(xiàn)狀和發(fā)展應用分析
關于SPI繼電器驅(qū)動控制器的現(xiàn)狀和發(fā)展應用分析
汽車工業(yè)對可靠性要求很高。同時,從業(yè)者也在不斷致力于有效控制成本和提高效率。為了滿足這些要求,汽車制造商對架構進行了標準化,并在不同的汽車平臺上整合了需求。另一方面,車輛中的電子元器件迅速增加,功能和選項的數(shù)量非常廣泛,因此還需要靈活性和可擴展性。
我們以其中最具代表性的車身控制模塊(BCM)為例,大量繼電器、指示器和執(zhí)行器分布在車輛上,每一個繼電器或者負載,就需要一個通道來進行控制,并且還要有全面的診斷功能。因此,需要一個產(chǎn)品可以高度集成這些功能和通道,SPI控制驅(qū)動器便是由此而誕生的。
以 “英飛凌SPIDER+系列TLE75602”為例,通過其內(nèi)部框圖(圖1)直觀地了解SPI控制驅(qū)動器的內(nèi)部架構,它是將多通道的驅(qū)動器集成于一起,并加以SPI控制,進一步提升集成度和診斷功能。
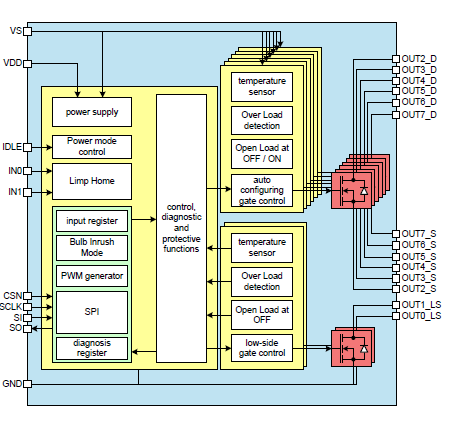
圖1 內(nèi)部框圖
1. SPI控制驅(qū)動器的特點
SPI控制驅(qū)動器作為一個多通道設備,相比于傳統(tǒng)的分立通道,可以減少PCB空間。與此同時,它還具有很多重要的特點,我們將著重介紹其SPI通訊,高低邊靈活可配,以及對于不同負載的兼容性特點。
1.1 SPI通訊
SPI是串行外設接口(Serial Peripheral Interface)的縮寫。SPI是一種高速的,全雙工,同步的通信總線,其節(jié)約芯片的管腳,同時為PCB的布局上節(jié)省空間。正是出于這種簡單易用的特性,如今越來越多的芯片集成了這種通信協(xié)議。
SPI同步的多從通訊協(xié)議使微控制器在I/O方面的資源會進一步地減少。
SPI總線可以分為并行控制或者菊花鏈控制。如圖2所示:
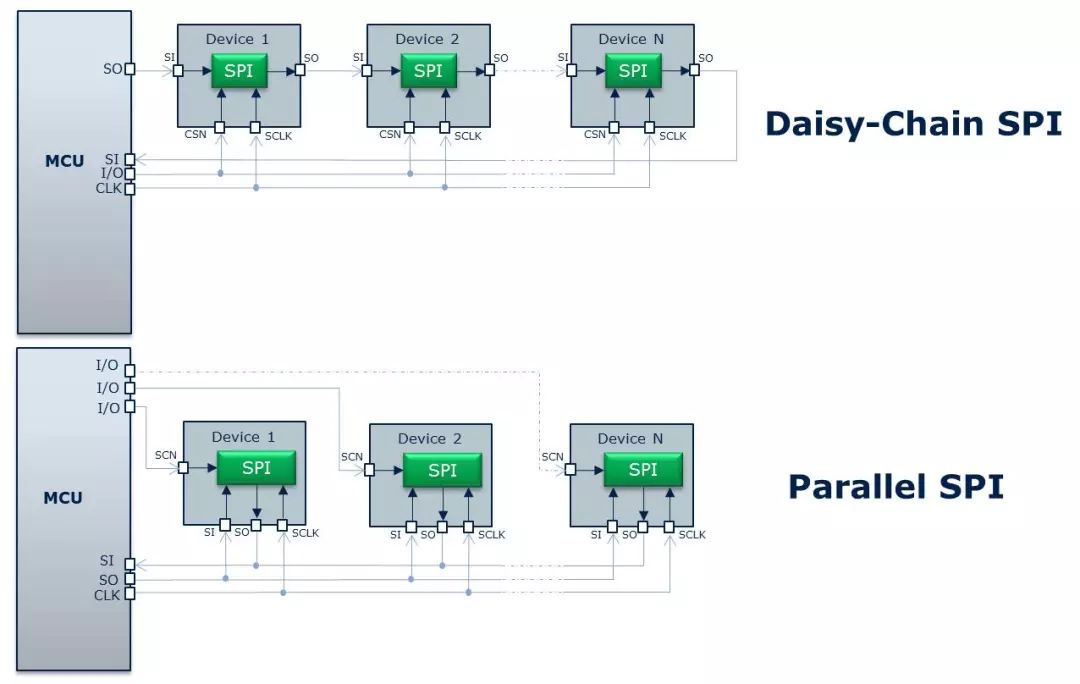
圖2 SPI菊花鏈及并行總線結(jié)構
對于并行SPI(也稱為級聯(lián)SPI),除了SCLK、SI等之外,總線中的每個從機都需要微控制器(芯片選擇、CSN)的一個輸出,以便將消息尋址到特定的從機。在這種配置下,微控制器和SPI從機之間的通信使用標準的16位字消息。
使用菊花鏈配置,無論鏈中的“從機”數(shù)量如何,微控制器所需的管腳數(shù)量都會減少到至少4個(SO,SI、CLK和CSN)。菊花鏈拓撲的缺點是,SPI消息長度與鏈中設備的數(shù)量“n”成比例(n*16位)。例如,如果在SPI菊花鏈配置中控制4個spider+設備,則消息長度將為64位。而且我們還要評估擴展位長消息所帶來的額外通信延遲的影響。
1.2 靈活配置的驅(qū)動電路拓撲
驅(qū)動負載的電路拓撲主要有高邊驅(qū)動、低邊驅(qū)動、半橋驅(qū)動和全橋驅(qū)動四種,如圖3所示:
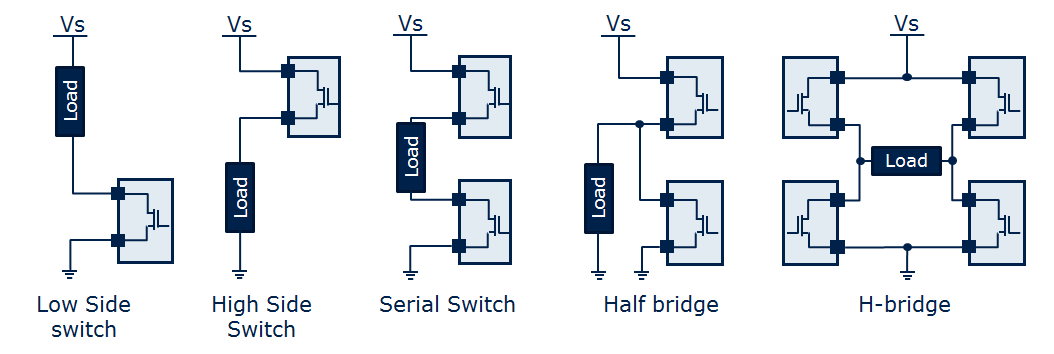
圖3 負載的四種驅(qū)動拓撲
傳統(tǒng)的低邊開關將所集成的MOS管的漏極引出,用于連接負載,從而將接地(GND)連接到負載,負載始終連接到另一端的更高電位,即電池正極。當?shù)瓦呴_關啟動時,電路閉合,電流流過負載。低邊開關是最容易實現(xiàn)和最便宜的拓撲結(jié)構,但在系統(tǒng)層面上有兩個主要缺點,即每負載需要兩根電線,一根用于開關,一根用于給負載供電;第二個缺點是,如果車輛中最常見的故障模式是對地短路,則負載會被意外激活。
傳統(tǒng)的高邊開關將所集成的MOS管的源極引出,用于連接負載,將電源或電池(VS)連接到負載,負載始終連接到另一端的較低電位,即接地(GND)。系統(tǒng)級的優(yōu)點是減少接線,因為開關只需要一根導線,負載的另一端直接連接到底盤上的接地(GND);此外,如果輸出對地短路,負載不會被意外激活。高邊開關需要一個電荷泵來提供高于電池(vs)的柵極電壓,以確保NMOS的柵極有足夠的電壓來激活開關。
SPI控制驅(qū)動器將內(nèi)部集成MOSFET 的源極和漏極分別引出,大大提高了通道的靈活性,不僅可以從高側(cè)或低側(cè)驅(qū)動負載,還可以實現(xiàn)圖3所示的半橋,全橋等拓撲;與此同時,可配置通道還有一個系統(tǒng)優(yōu)勢:同一設備內(nèi)可以支持不同的電池或保險絲供電。
1.3 不同負載的兼容性
負載主要分為三類,分別是阻性負載,容性負載和感性負載。
電阻負載僅受電流能力和功耗的限制;SPI控制驅(qū)動器最典型的電阻負載是傳感器、參考電壓和指示燈。
典型的感性負載是繼電器線圈;除了功率級的功耗和電流能力外,這種負載的一個關鍵考慮因素是負載關閉時的耗散感應能量。SPI控制驅(qū)動器集成了一個有源箝位電路,它能夠重復吸收大多數(shù)汽車繼電器的感應能量,而無需額外的外部保護電路(即續(xù)流二極管)。
電容性負載簡單地定義為初始峰值電流或浪涌大于穩(wěn)態(tài)電流的任何電子負載。在這種情況下有些半導體開關通常會因過電流保護而閉鎖。以英飛凌SPI控制驅(qū)動器的SPIDER+系列為例,它還可以通過實施自動重試策略驅(qū)動小燈泡和其他電容負載。
綜上所述,我們可以通過傳統(tǒng)分離器件與SPI控制驅(qū)動器方案對比(見圖4)直觀地看到傳統(tǒng)分立器件的方案和SPI控制驅(qū)動器 方案的區(qū)別,以及SPI控制驅(qū)動器在系統(tǒng)層面的優(yōu)勢。
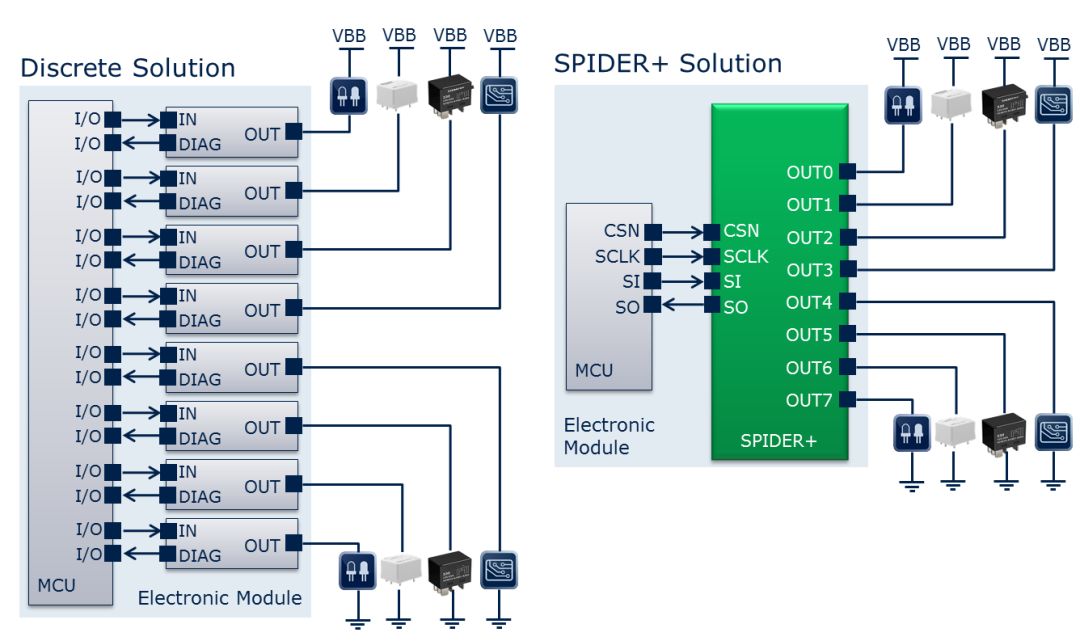
圖4 傳統(tǒng)分離器件方案對比SPI控制驅(qū)動器方案
2. SPI控制驅(qū)動器的跛行回家模式
作為一個以SPI通訊為主要控制方式的驅(qū)動器,如果微控制器和驅(qū)動器之間的SPI通信損壞,意味著發(fā)送的消息和預期的響應數(shù)據(jù)不匹配,那么必須要有一種故障安全機制,即使在電子模塊發(fā)生故障的情況下,包括軟件執(zhí)行錯誤、SPI消息損壞或數(shù)字電源電壓不正確等情況下,依舊可以確保車輛中的某些安全臨界負載保持功能。這種故障安全機制就叫做跛行回家模式。
為了更清晰地解釋跛行回家模式的實現(xiàn)方法,我們以英飛凌的SPI控制驅(qū)動器TLE75602和系統(tǒng)供電芯片TLE9263QX為例,搭建最小系統(tǒng)來進行解釋。
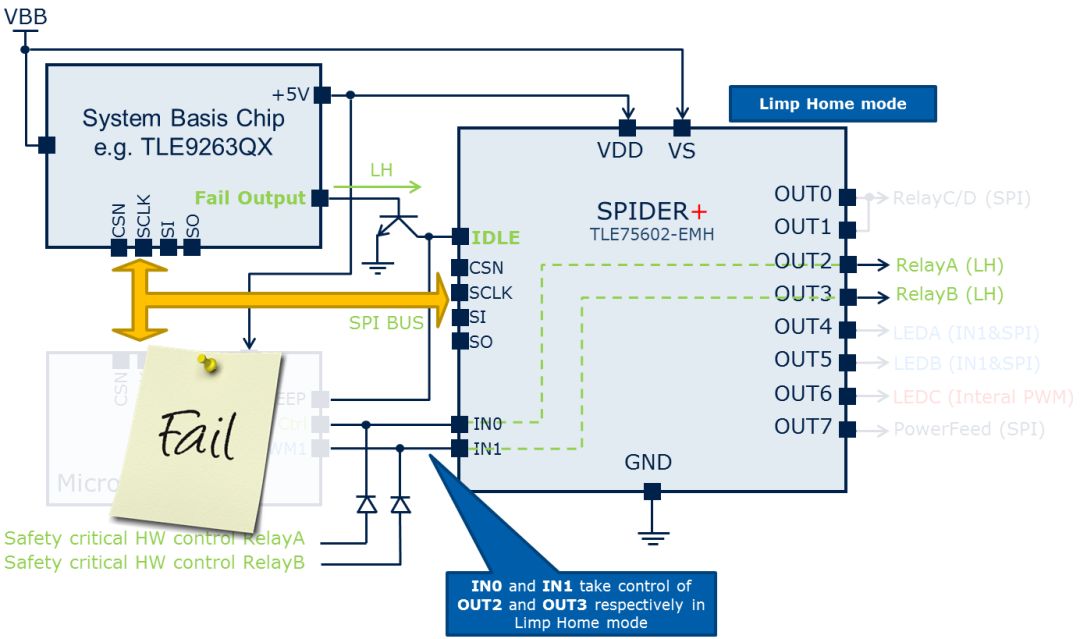
圖5 跛行回家模式示例
示例中由系統(tǒng)供電芯片來監(jiān)控微控制器、SPI通信和+5V/VDD電源的狀態(tài),如圖5 所示:繼電器A和繼電器B被分配給out2和out3,因為在跛行回家模式期間,這些通道可以由IN0和IN1直接控制。微控制器IO 與外部安全硬件一起用作冗余路徑。正常模式時,其輸出由微控制器進行控制;當供電芯片檢測到問題時(MCU運行故障,導致與系統(tǒng)供電芯片的看門狗交互失敗),它將觸發(fā)“故障輸出”,拉低與其連接的TLE75602 IDLE 管腳,而微控制器失去功能, OUT2, 3的繼電器A, B 直接由外部的安全硬件進行控制,進入安全的故障處理狀態(tài)。
3. SPI繼電器驅(qū)動控制器的目標應用
SPI繼電器驅(qū)動控制器最常見的汽車應用是車身控制模塊(BCM)領域。但是,其幾乎可用于任何汽車電子控制單元或電子控制單元,例如智能PDB(配電盒)、暖風、通風與空調(diào)活門控制、智能后視鏡控制、E-shift等。
希望以上介紹能夠?qū)Υ蠹页醪搅私釹PI繼電器驅(qū)動控制器有所幫助。我們還會將其重要的特點,如功能安全相關特性等,在后續(xù)的文章和視頻中進一步介紹。
-
繼電器
+關注
關注
132文章
5333瀏覽量
148811 -
控制器
+關注
關注
112文章
16332瀏覽量
177812 -
拓撲結(jié)構
+關注
關注
6文章
323瀏覽量
39189
發(fā)布評論請先 登錄
相關推薦
繼電器工作原理分析 熱過載繼電器的結(jié)構特征
熱水器繼電器壞了是什么情況
傳統(tǒng)接觸器繼電器控制系統(tǒng)的缺點
PLC控制系統(tǒng)和控制繼電器的區(qū)別
密封繼電器是什么繼電器
磁保持繼電器驅(qū)動芯片的作用
速度繼電器主要用作什么控制
繼電器開關控制器是什么東西
電壓繼電器與電流繼電器的對比
溫度繼電器與溫度控制器的區(qū)別
固態(tài)繼電器與普通繼電器的比較
繼電器控制和plc控制的區(qū)別是什么
控制繼電器與PLC的對比分析
繼電器光耦在微控制器中的應用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論