 關于RSS的分析和介紹
關于RSS的分析和介紹
當交通事故發生時,人類會基于法律、安全和文化等多方面考量對事故責任做出判斷,而自動駕駛汽車卻無法考慮的那么全面。
英特爾責任敏感安全(RSS)模型則規范了在一系列復雜路況中的人類判斷,最重要的是,明確界定了什么是安全駕駛,什么是魯莽駕駛。
RSS如何界定駕駛規范?
對于人類駕駛員來說,碰撞和其它事故責任的解釋不是一成不變的。駕駛員的失誤,都根據事件發生后的各類信息因素來判定。可是對于機器來說,這些安全駕駛的定義將會變得正式而精準。因為機器更加了解周圍環境的精確信息,并且永遠不會走神分心。我們不需要在事后解釋和判定機器的行為,反而可以提早對其進行編程,使其遵循一個既定的模式,例如,超車時的安全距離,或是行人從停泊的車后突然出現時的應急反應等等。
“擁有路權,而不是爭搶路權”的常識觀念也是RSS模型的一部分。RSS拒絕魯莽駕駛體現在兩個方面。一方面,不允許自動駕駛汽車(AV)做出可能導致碰撞的決定;另一方面,不允許自動駕駛汽車執行非法操作,例如:為了避免碰撞而跨過實線,或是通過造成輕微一起碰撞來避免另一起碰撞。總之,RSS不允許自動駕駛汽車魯莽行動,因為這有可能會造成連環的事故。
RSS:為自動駕駛汽車出具“安全證明”
很多人認為自動駕駛不安全,可是卻說不出原因。從邏輯上說,要想批判自動駕駛的RSS模型,必須找到一個RSS確定的責任與“常識性”的人類判斷不一致的事故場景。但即便研究了國家高速公路交通安全管理局的600萬起撞車事故之后,也只得出了它們都符合RSS模型的結論。隨著時間的推移將會出現更多自動駕駛使用場景。英特爾將會把這些場景與RSS相匹配,并在必要的時候及時更新模型。
總之,英特爾始終堅信,就汽車安全而言,精密設計的自動駕駛汽車,其安全性比人類駕駛汽車提高上千倍。英特爾投身這一領域,是為了推動行業達成共識,把判斷規則、責任和過錯規范化,以實現對社會的巨大效益。RSS不是一個旨在規避事故責任的系統,而是一個創新性模型,其目的是可以為自動駕駛汽車出具一份正式的“安全證明”。未來英特爾將繼續深耕自動駕駛領域,不斷推進RSS模型更新,讓自動駕駛從科學實驗進入真正的市場。
-
英特爾
+關注
關注
61文章
9985瀏覽量
171963 -
RSS
+關注
關注
1文章
33瀏覽量
12355 -
自動駕駛
+關注
關注
784文章
13877瀏覽量
166618
發布評論請先 登錄
相關推薦
高效偏振無關傳輸光柵的分析與設計
Minitab常用功能介紹 如何在 Minitab 中進行回歸分析
射頻分析儀的技術原理和應用場景
?ISP算法及架構分析介紹

關于啟閉機的介紹

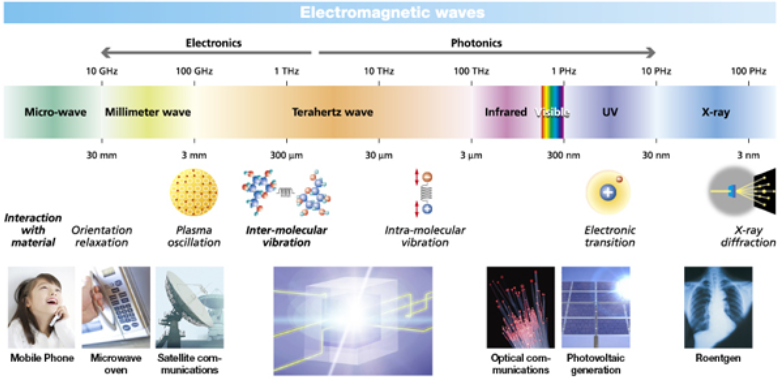
關于太赫茲波的介紹





 工商網監
工商網監
評論