") 機器人在智能工廠里的作用分析
機器人在智能工廠里的作用分析
物聯(lián)網(wǎng)時代的到來
讓各行各業(yè)都迎來了翻天覆地的變化
無人機在為我們記錄生活
無人駕駛汽車也開始上路測試
就連傳統(tǒng)的工廠也開始擁有智慧的雙手和大腦
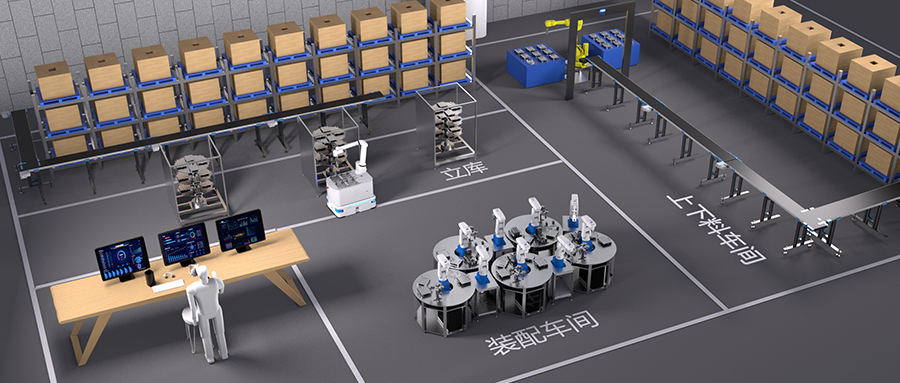
英特爾智能工廠,擁有著技術(shù)自動化系統(tǒng)硬件設(shè)備和智能化軟件,讓機器人和人完美配合,機器人在智能工廠中仿佛施展了玄幻的魔法,能夠“隔空取物”,按照設(shè)定好的程序運行批量完成流水化作業(yè),智能制造貫穿了整個生產(chǎn)環(huán)節(jié)。
機器人的眼睛
完成“隔空取物”的首要因素是機器人需要能夠準(zhǔn)確感知物體的位置,即需要傳感器來確定,傳感器相當(dāng)于機器人的眼睛,可以實時獲取周圍環(huán)境的信息,并且獲得物體的空間位置。
靈巧的機械手
僅僅確定物體的位置顯然還無法幫助我們實現(xiàn)“隔空取物”,為了適應(yīng)這些不同種類、不同形狀的物體,機器人還需要一雙靈巧的機械手。
首先需要保證機械手能夠安全運動到機器人抓取所需要到達的位置,完美避開路障,同時需要高效運動,優(yōu)化運動路徑。
穩(wěn)定的機械手
當(dāng)抓取到物體之后,有可能無法保證抓取成功,這事就需要借助搭載在機械手上的傳感器,發(fā)揮實時的末端感應(yīng)和快速調(diào)整功能。依據(jù)傳感器信息對物體抓取是否穩(wěn)定進行實時判斷,并且做出相應(yīng)調(diào)整,從而保證抓取的穩(wěn)定性。
在英特爾的制造工藝設(shè)備中,利用傳感器收集數(shù)據(jù),并對數(shù)據(jù)加以整理和分析,之后可以進行有意義的分析或者采取行動,因此,英特爾智能工廠中的機器人十分擅長“隔空取物”,能夠高效、穩(wěn)定并且安全的完成抓取,提高工廠的生產(chǎn)效率。
隨著物聯(lián)網(wǎng)和大數(shù)據(jù)時代的到來,全球工業(yè)化革命開始提上日程。在智能工廠中,機器人已經(jīng)得到了廣泛運用。如今工廠中的機器人能夠按照既定程序,在簡單的環(huán)境中完成任務(wù)。但是當(dāng)環(huán)境發(fā)生變化,我們需要它能夠快速學(xué)習(xí)并適應(yīng)新的工作環(huán)境。實驗室或者工廠的訓(xùn)練場景無法涵蓋未來機器人可能將會面臨的所有任務(wù)。無論是選擇具有更強泛化能力的模型,還是利用模仿學(xué)習(xí)獲得新的技能,如何讓機器人擁有一顆不斷學(xué)習(xí)的“最強大腦”也是需要我們努力的方向。
-
機器人
+關(guān)注
關(guān)注
211文章
28405瀏覽量
207015 -
大數(shù)據(jù)
+關(guān)注
關(guān)注
64文章
8885瀏覽量
137426 -
智能工廠
+關(guān)注
關(guān)注
3文章
999瀏覽量
42412
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
復(fù)合機器人正逐漸在倉儲物流領(lǐng)域發(fā)揮重要作用
復(fù)合機器人在3c電子行業(yè)的應(yīng)用
【書籍評測活動NO.51】具身智能機器人系統(tǒng) | 了解AI的下一個浪潮!
智能巡檢機器人在多個行業(yè)的應(yīng)用

富唯智能協(xié)作機器人在食品飲料行業(yè)的柔性應(yīng)用

機器人在空間中運動指令主要有哪些
FMEA賦能智能機器人:打造零缺陷的未來工廠

協(xié)作機器人在食品和飲料中的的應(yīng)用
其利天下技術(shù)·搭載無刷電機的掃地機器人的前景如何?
探索未來:智能巡檢機器人在工業(yè)領(lǐng)域的應(yīng)用

創(chuàng)想激光焊縫跟蹤系統(tǒng)適配錢江機器人在智能焊接領(lǐng)域的應(yīng)用

【TE Perspective】協(xié)作機器人在工廠自動化中日益增長的作用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論