


第1步:LIDAR是什么?

維基百科對LIDAR有兩種不同的含義:
- 光檢測和測距
- 激光成像檢測和測距
一般來說,它可以看作旋轉的距離傳感器base,在連續旋轉時對范圍數據進行采樣。對于每個成功的樣本,測量的距離以相應的角度發送。
在這種情況下,數據通過UART發送。
LIDAR需要連接到Arduino的硬件串行端口(UART),對于基本的arduino,這意味著你不能將任何UART數據發送到串行控制臺。因為它們只有一個串口。對于只有1個硬件串口的基本Arduino,您可以添加額外的軟件串口。將在此instructable中使用的庫不支持軟件串行端口(在編寫本文時)。
因此,如果您希望能夠將發送串行數據發送到串行控制臺調試目的你需要一個帶有多個串口的arduino。就像有:Arduino Mega,Arduino M0/Zero(SAMD21)。
如果您不需要將數據發送到計算機進行調試,您可以選擇任何arduino。
對于這個教練我是將使用基于SAMD21微控制器Arduino M0/Zero的更現代,更強大的arduino。
必要部分:
Arduino M0 ebay鏈接
面包板ebay鏈接
跳線ebay鏈接
5V電源ebay鏈接
24 Led ring ebay link
首先你需要從robopeak安裝RPLIDAR庫:
https://github.com/robopeak/rplidar_arduino,這個庫提供了兩個有關如何使用LIDAR的有趣例子。您可以在本文中找到有關如何在arduino IDE中安裝庫的更多信息:https://www.arduino.cc/en/Guide/Libraries
現在打開“simple_connect” “庫中包含的示例代碼。
從LIDAR到arduino進行必要的硬件連接:
- 將RPLIDAR的串行端口(RX/TX/GND)連接到Arduino板(引腳0和引腳1)
- 連接RPLIDAR的電機控制引腳連接到Arduino板引腳3
- 使用外部5V電源為電機控制引腳和激光雷達供電。
在虛擬設置中你將擁有更改以下代碼:“lidar.begin(Serial);”根據使用的串口。使用Arduino M0時,應將“Serial”更改為“Serial1”。對于其他Arduino來說,這可能會有所不同。
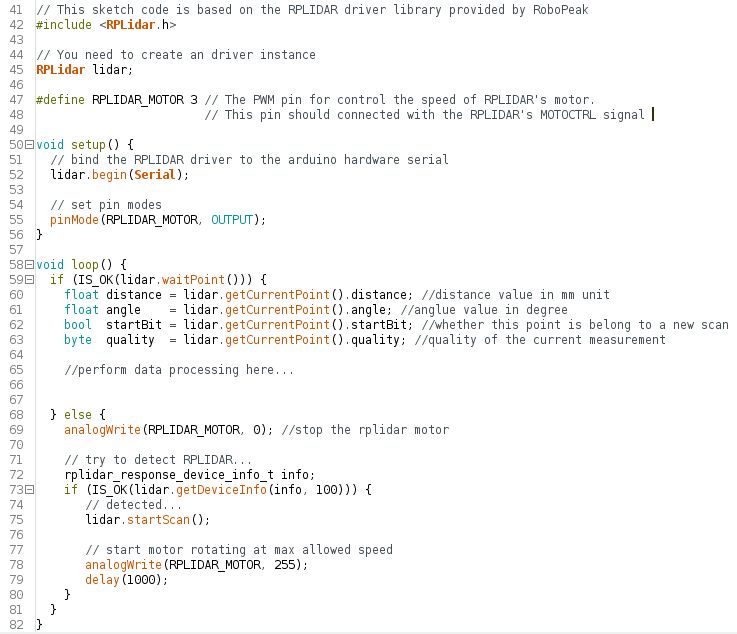
第一張圖是示例草圖的樣子,第60-63行包含可用于從LIDAR獲取數據的變量名。
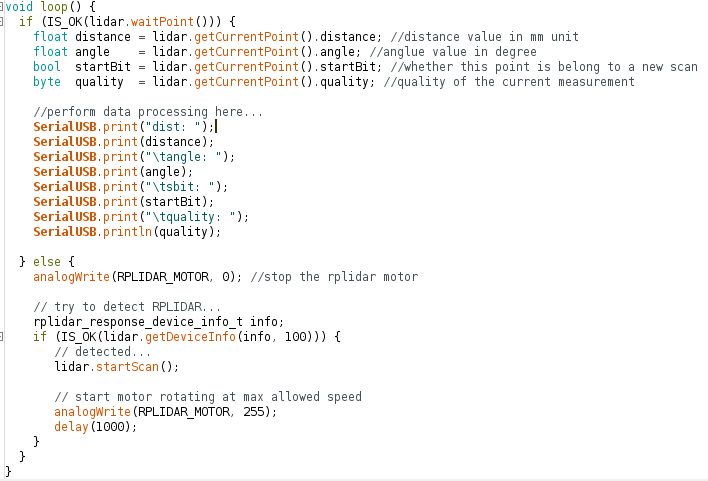
如果您想知道這些數據是什么樣的,您可以將此數據打印到串行監視器,第二張圖片中的代碼。
在以下步驟中我們將用激光雷達和LED環做一個非常基礎的工作項目。
步驟3:制作LIDAR LED環形項目








為此項目我們將在LIDAR上安裝一個可尋址的led環。通過這種方式,我們可以可視化LIDAR數據。
在此特定程序中,LED將在最接近的檢測信號的方向上打開。
此項目的代碼基于其中一個示例來自robopeak:
https://github.com/robopeak/rplidar_arduino/tree/m 。..
此項目的更改代碼包含在此步驟的zip文件中。
需要的零件:
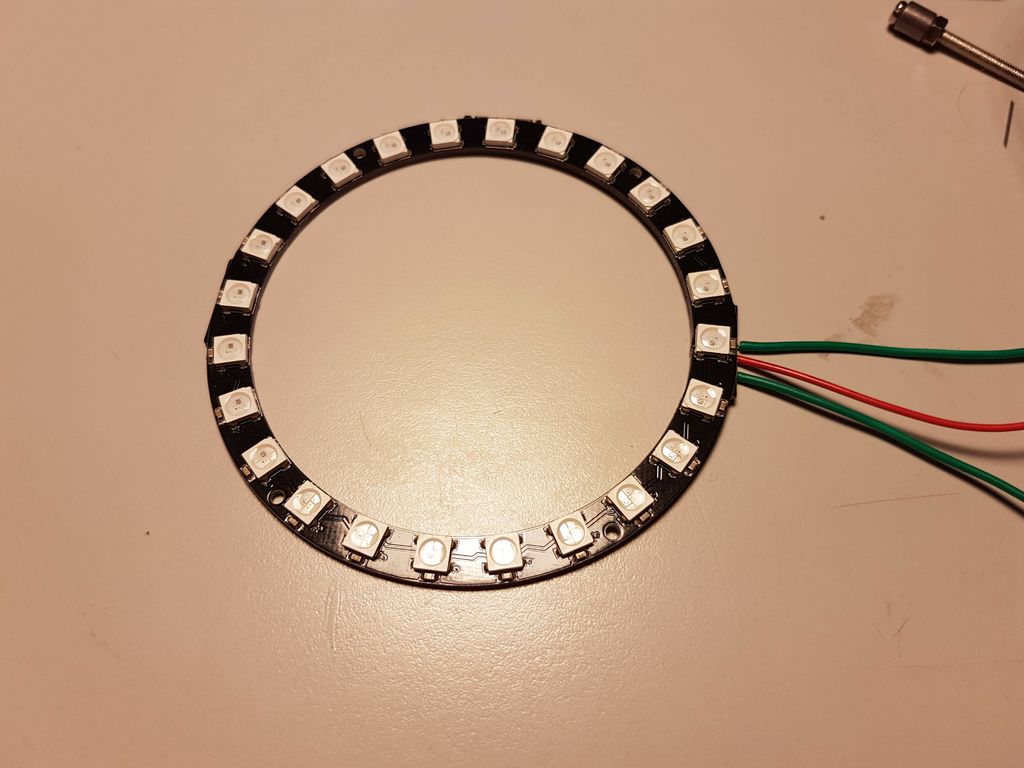
- LED環:24個LED大到足以裝上激光雷達,內徑70mm
- Arduino Zero
- LIDAR
- 獨立5V電源
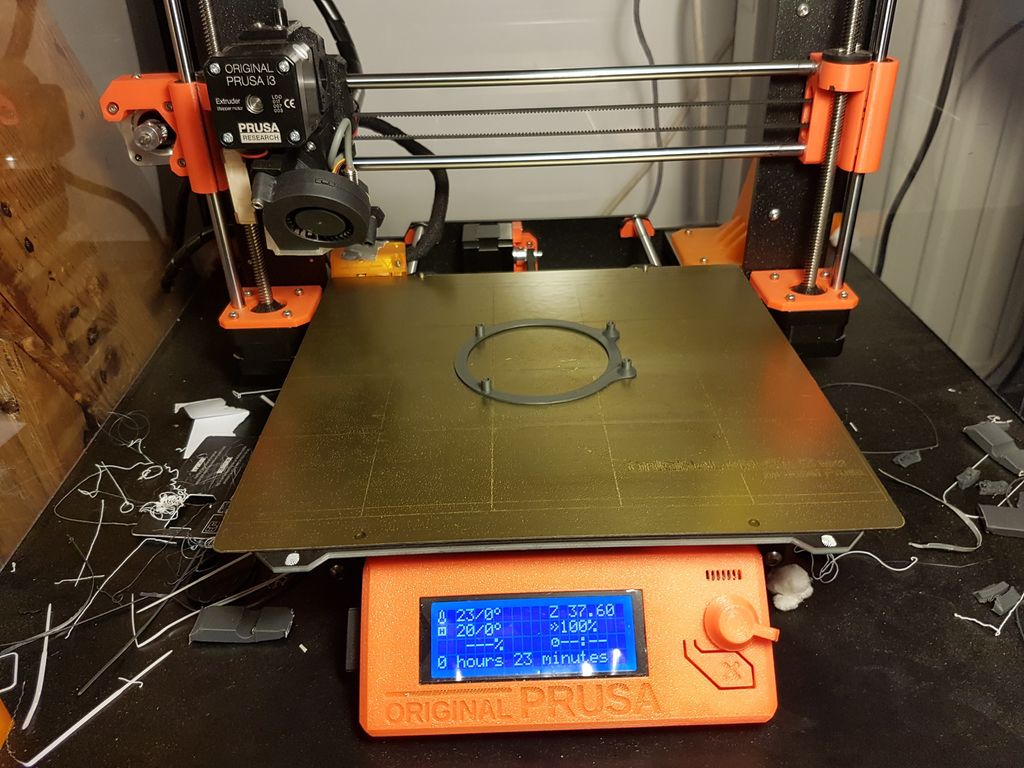
- 3D打印部件:https://www.thingiverse.com/thing:3181816
獲取所有需要的部件
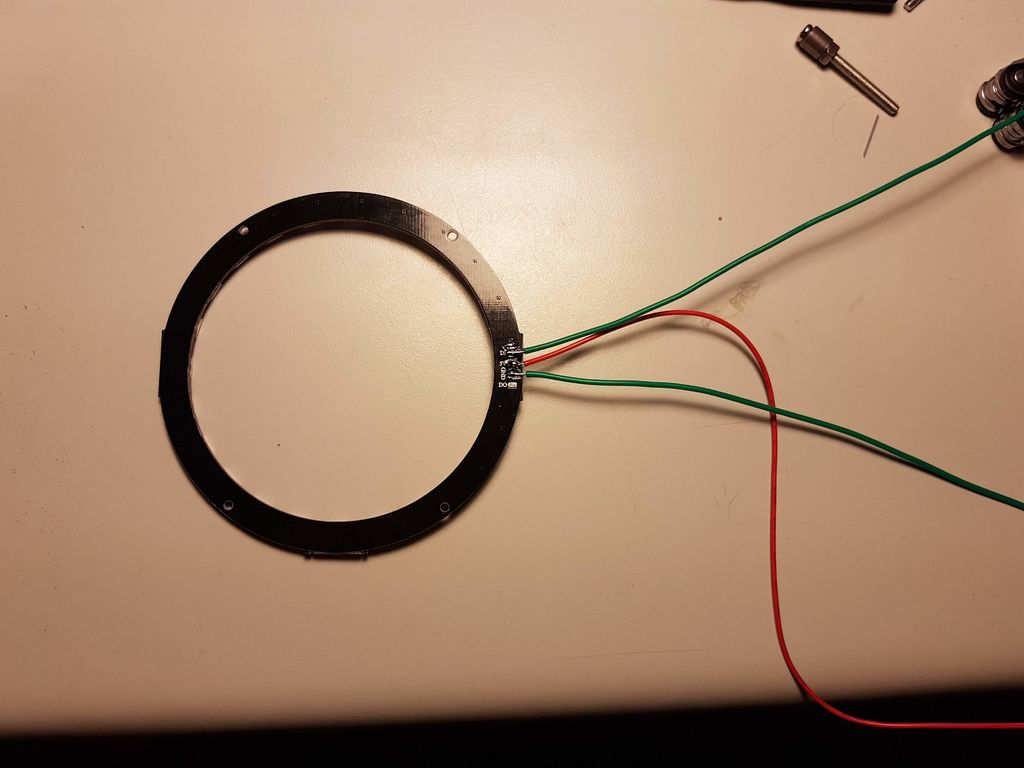
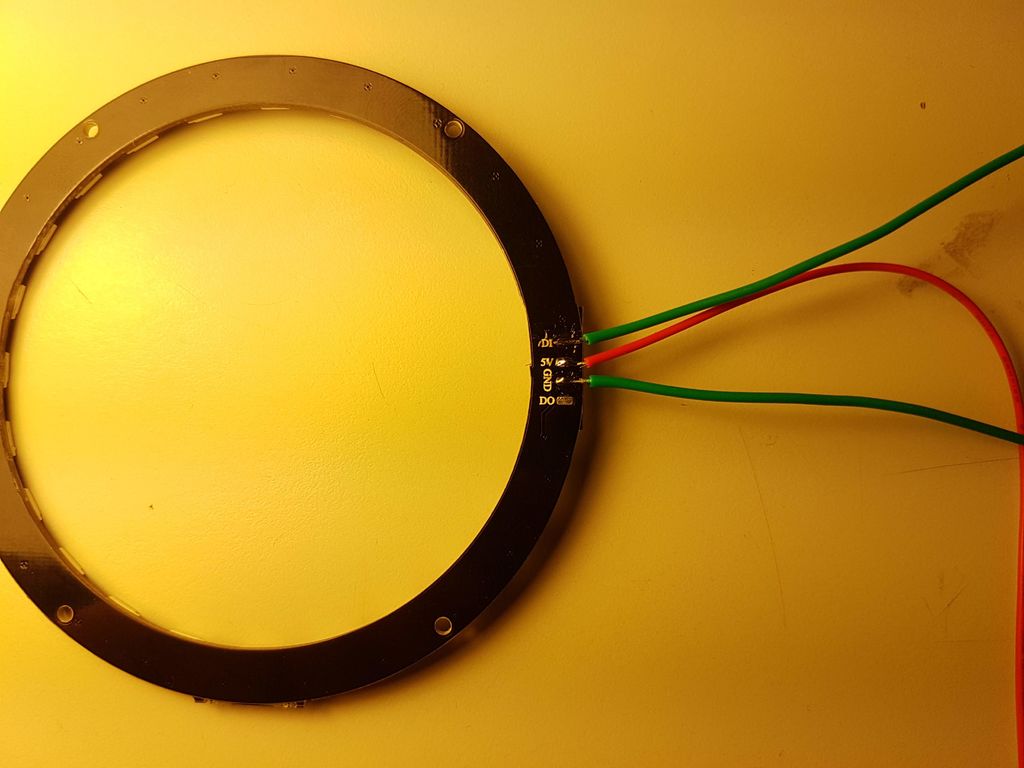
焊接連接到LED環的電線
將LED環粘貼到3d打印部件上
將3D打印部件安裝到激光雷達上,3D打印部件上有用于M2.5螺釘的孔但是我沒有把它們放在我剛剛使用的熱膠上
將電線從LIDAR連接到arduino:
GND - 》 GND
5V - 》 5V的獨立電源
迪 - 》 arduino的針腳D5
上傳草圖并打開外部電源
-
Arduino
+關注
關注
190文章
6501瀏覽量
193044 -
RPLIDAR
+關注
關注
0文章
7瀏覽量
7958
發布評論請先 登錄






 工商網監
工商網監

評論