 激光尖刺夾克的制作
激光尖刺夾克的制作
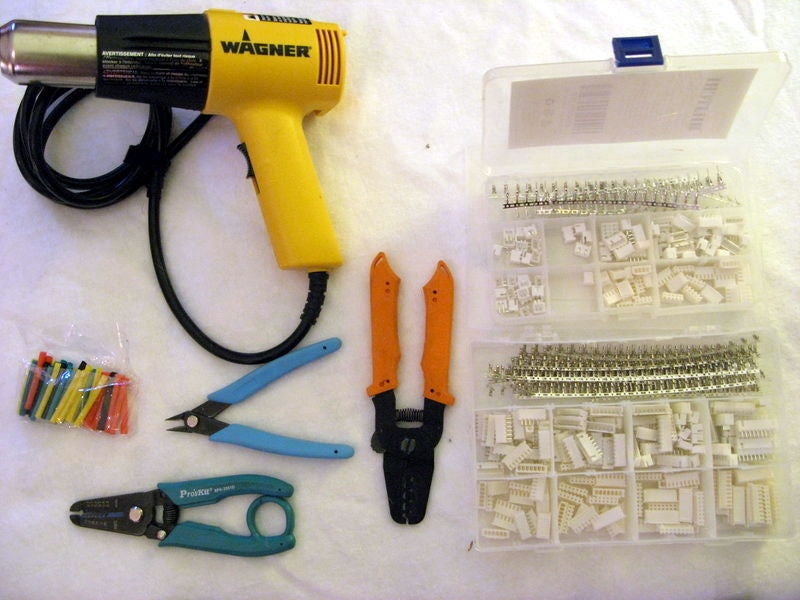
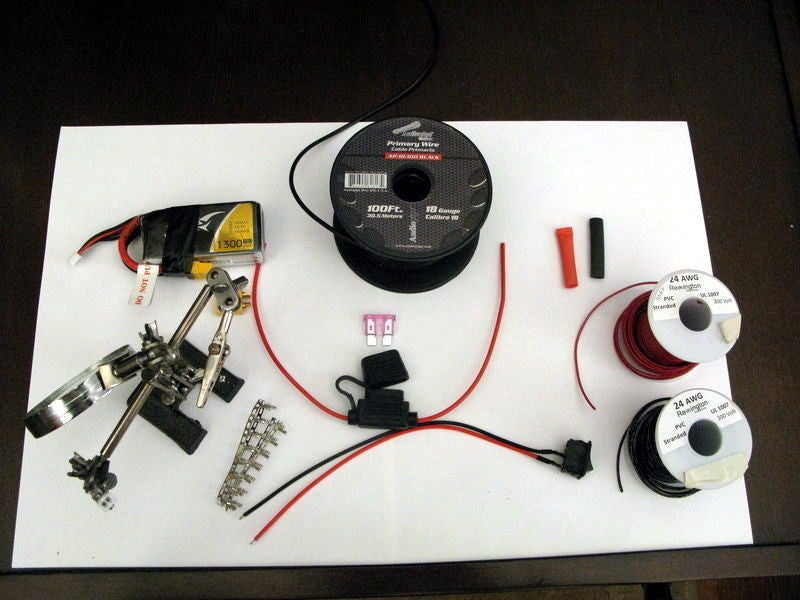
步驟1:材料







Jacket
烙鐵
Solder
剪線鉗
脫衣舞娘
Flux
伸出援助之手(可選)
焊接編織(可選)
丁腈手套(可選)
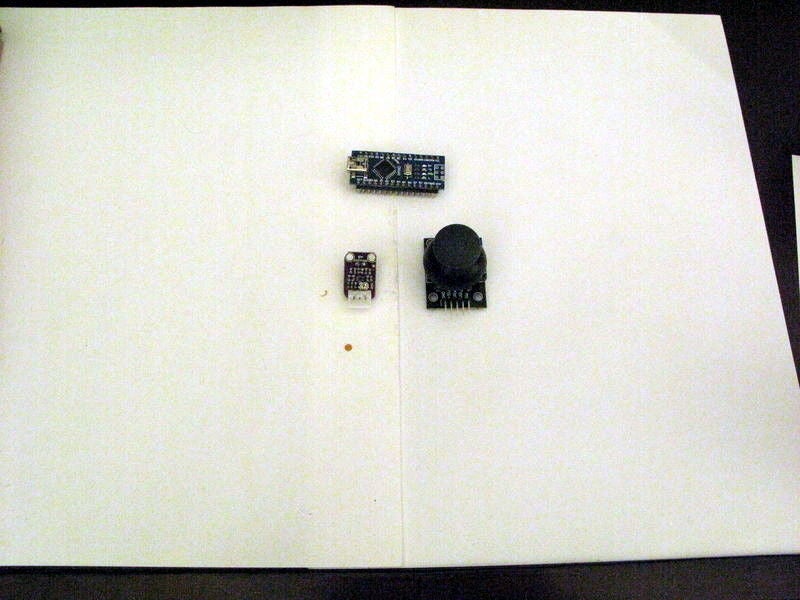
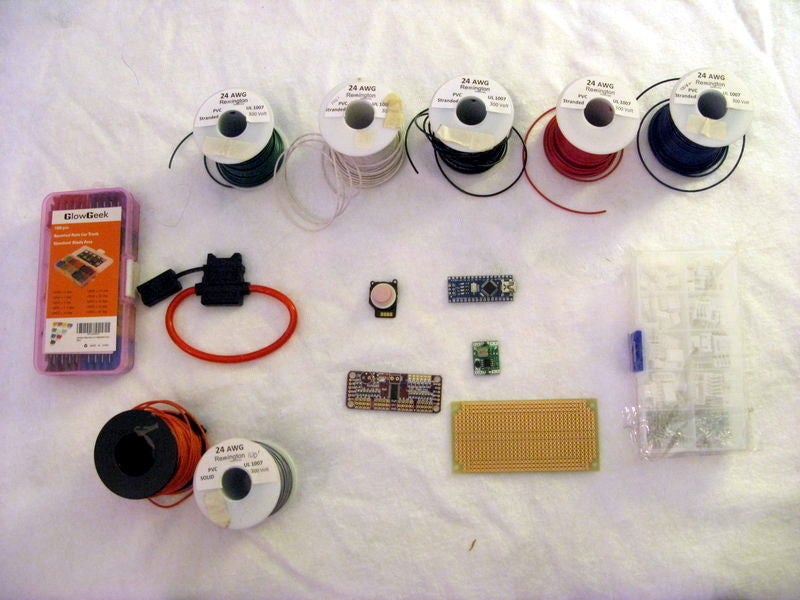
Arduino Nano
操縱桿模塊
麥克風
128x激光二極管模塊
2x PCA9685 16通道PWM驅動器
5V降壓轉換器
5V 3A BEC
7.4V 850mAh LiPo電池
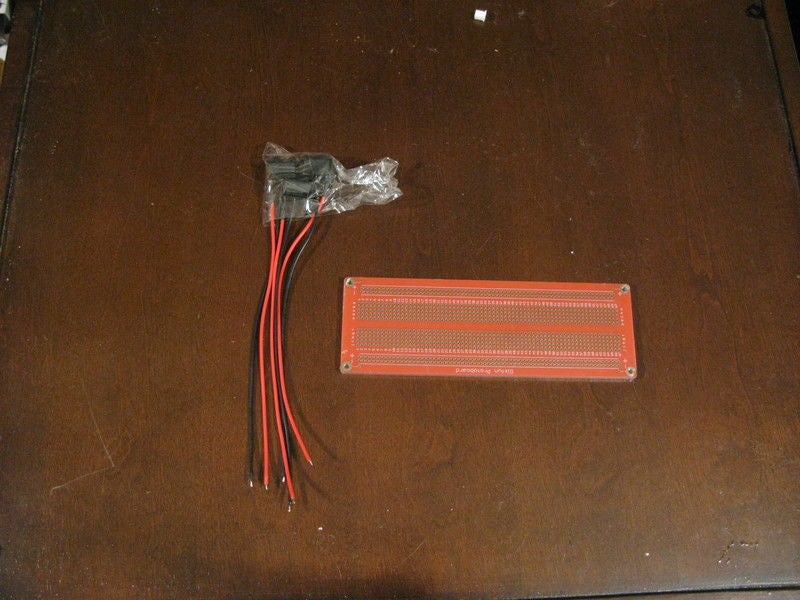
XT30連接器
搖臂開關
2s LiPo充電器
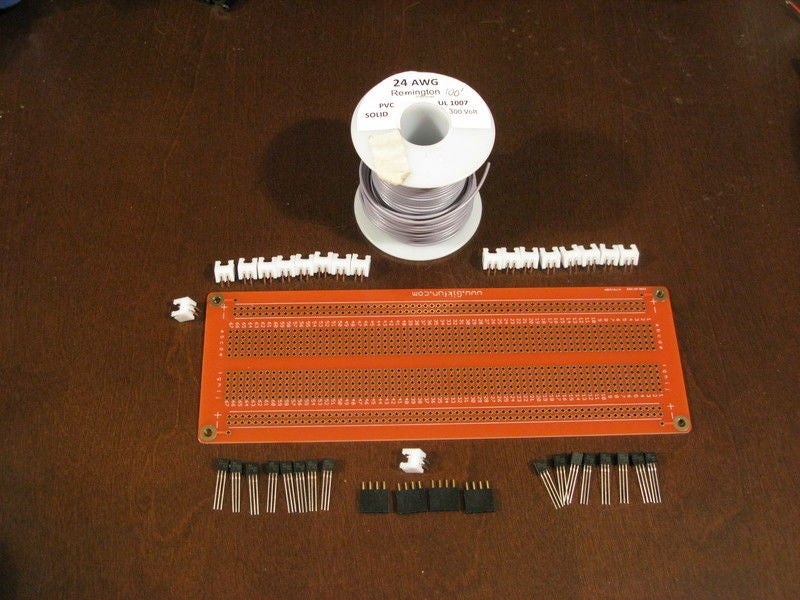
2x Gikfun原型板
1x protoboard
1x小型模板
50x 2pin公/母JST 2.5mm連接器
5x 6pin公/母JST連接器
150x JST 1.25mm公/母對
6種顏色的24 AWG電線,擱淺300V(10英尺)
2種顏色24 AWG電線,擱淺300V(200英尺)
2種顏色的24 AWG電線,實芯(10英尺)
工程師PA-21通用壓接鉗
1/4“編織電纜套管
熱縮管
熱風槍
12x 30mm M3螺栓& 20x 6mm M3螺栓
100x M3螺母
400x 25mm M2黑色六角帽螺栓
1000x M2螺母
Tubing
24“x36”x1/16“黑色亞克力板
3x 12”x12“x1/8”木板
激光切割機
魔術貼領帶
按扣(可選)
剪刀
電纜扎帶)
電纜夾
快速說明:亞馬遜通常提供比EBay替代品更快的送貨方式但通常是成本的2-10倍。
我發現我在亞馬遜和eBay上訂購的商品之間的質量差異往往很小。
我更愿意自己卷曲連接器,但如果你不介意多付一點,你可以買預壓接頭。我也喜歡有角度的母連接器,雖然直接和傾斜的良好組合提供了更多的選擇。
第2步:設計概述

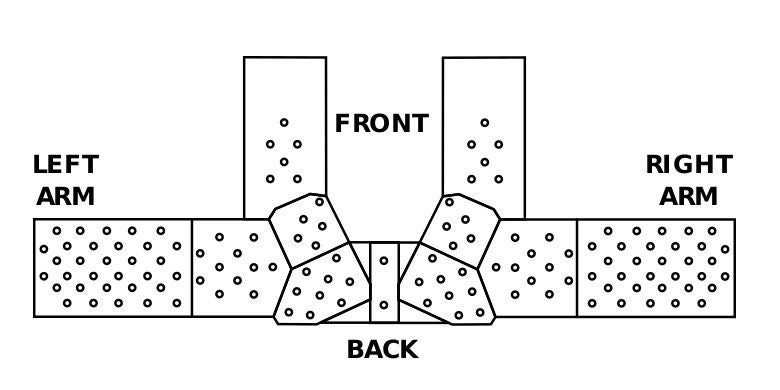
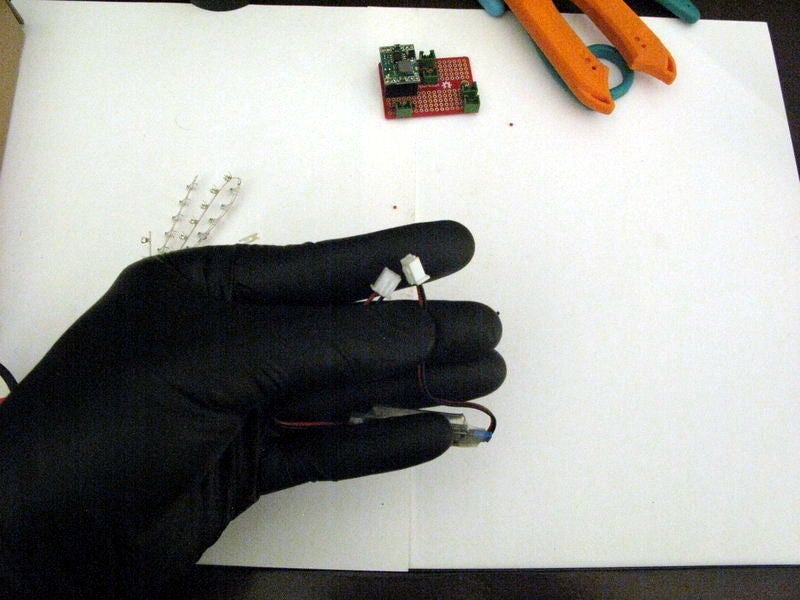
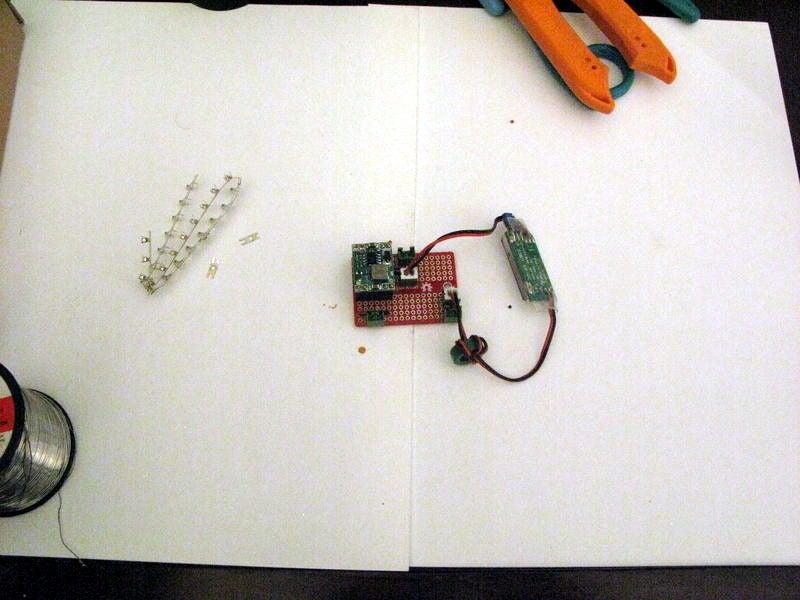
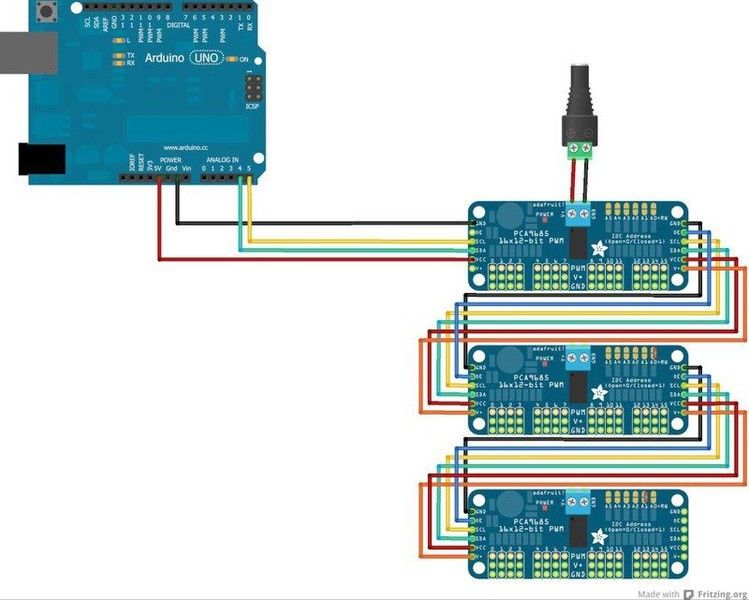
基本設計是將128個激光二極管連接到“moto”護套的臂,肩部和上背部,并通過電子設備為激光二極管提供電源和控制。電子設備放入外殼中,所有電線,電子設備及其外殼都隱藏在外護套外殼和內襯之間的接口中。
操縱桿和麥克風用于輸入。電源由LiPo可充電電池提供。
在上圖中,使用LED代替激光二極管。激光二極管模塊有自己的內部電路,所以不需要像LED那樣的限流電阻。
基本組件包括:
激光二極管外殼和附件
電子外殼
接線和連接
基本工作流程大致如下:
使用連接器和外殼組裝激光二極管
將激光二極管連接到夾套焊接電子設備并將它們組裝在外殼中
創建電纜并將激光二極管連接到電子設備上
穿上它
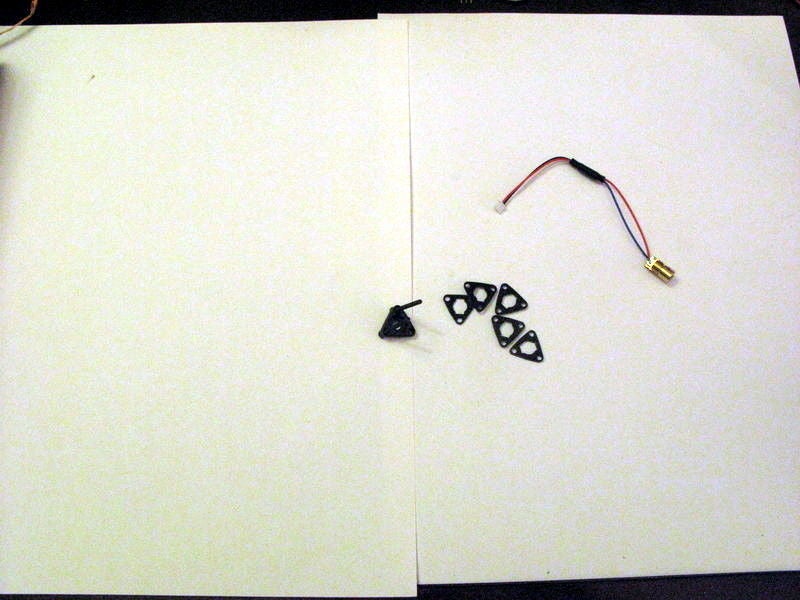
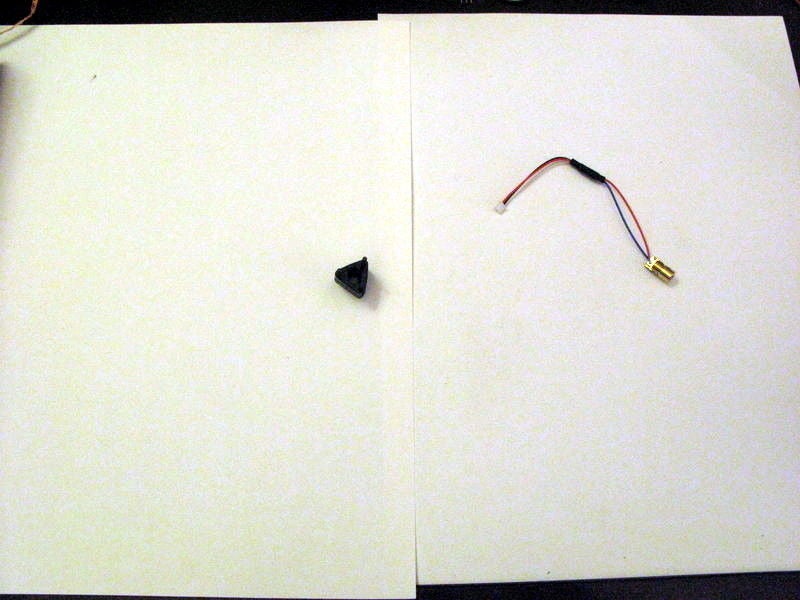
步驟3:激光二極管組件
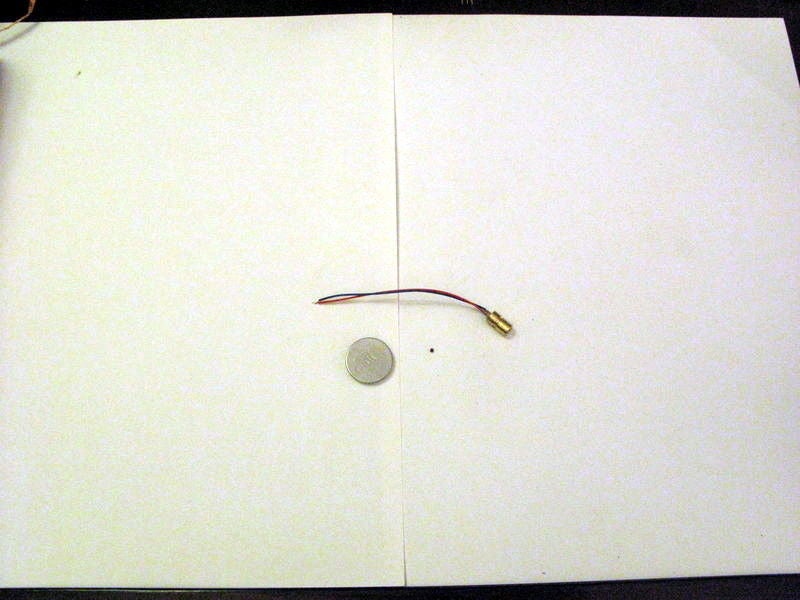
激光二極管通過激光切割“外殼”連接到護套外部。每個激光二極管外殼都是一堆激光切割丙烯酸,與M2螺絲配合在一起。外殼的底座放在外殼外殼下面,為激光二極管和激光二極管導線提供支撐。
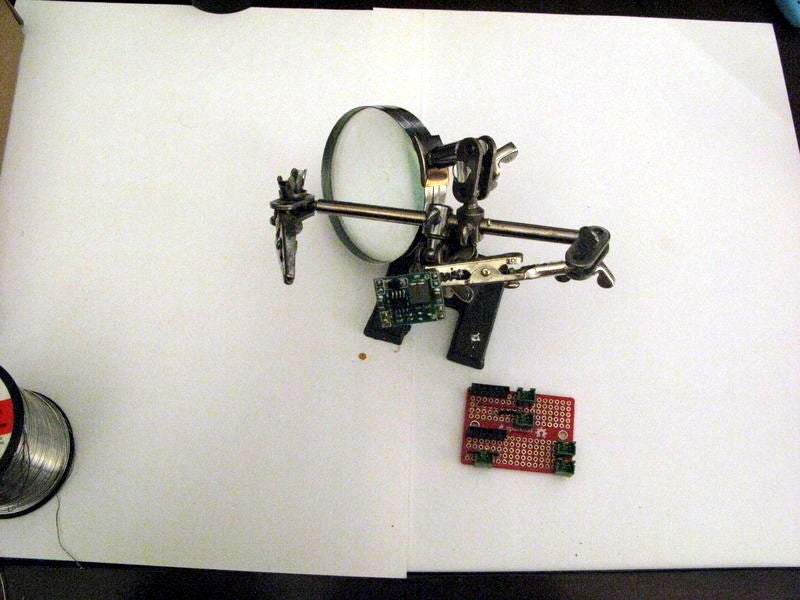
步驟4:連接激光二極管布線

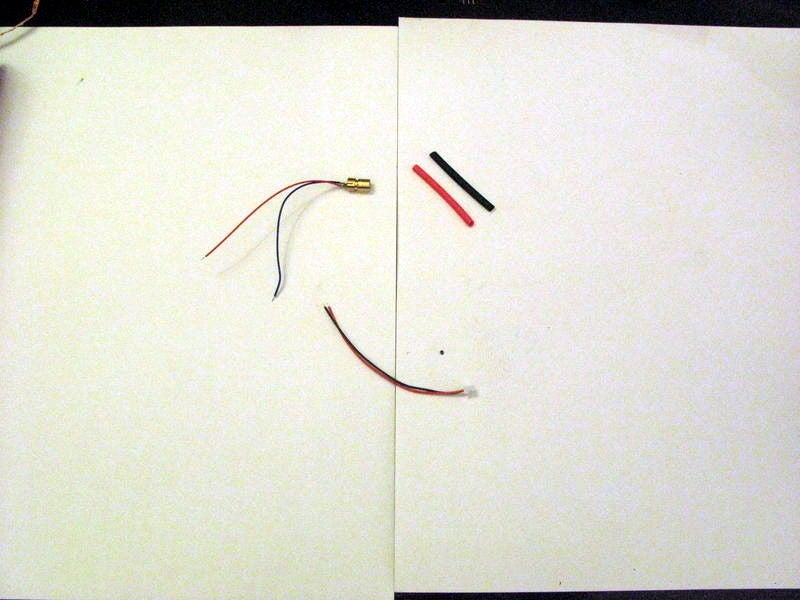
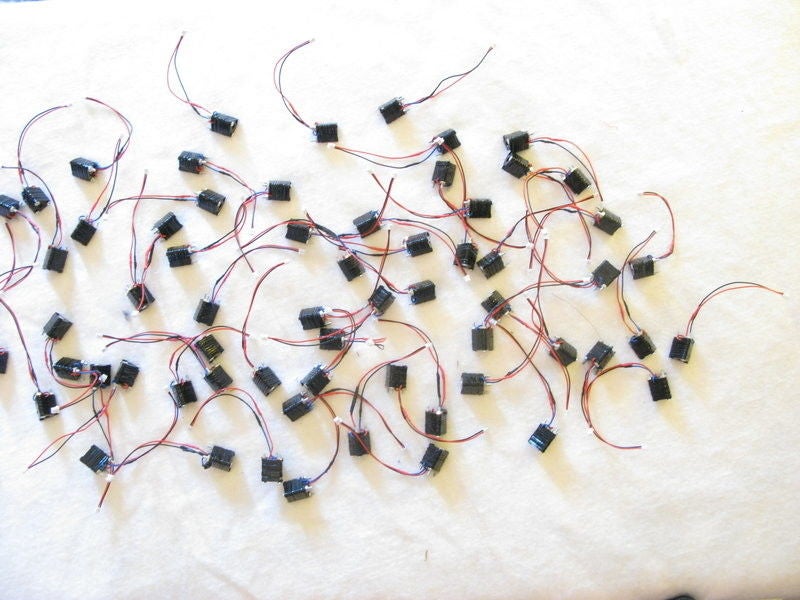
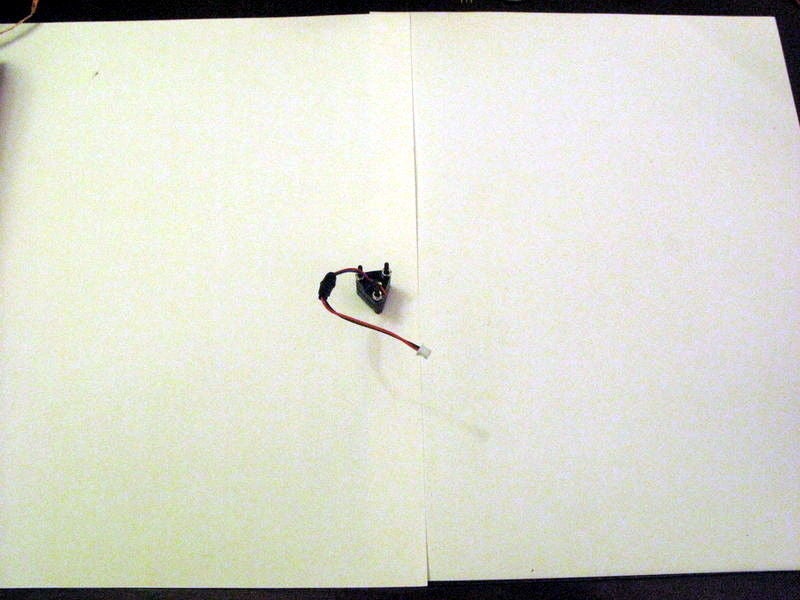
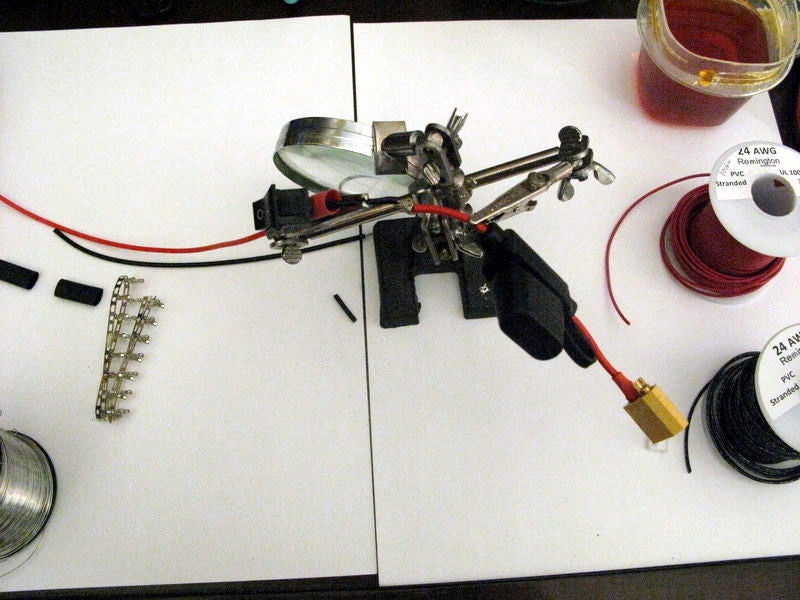
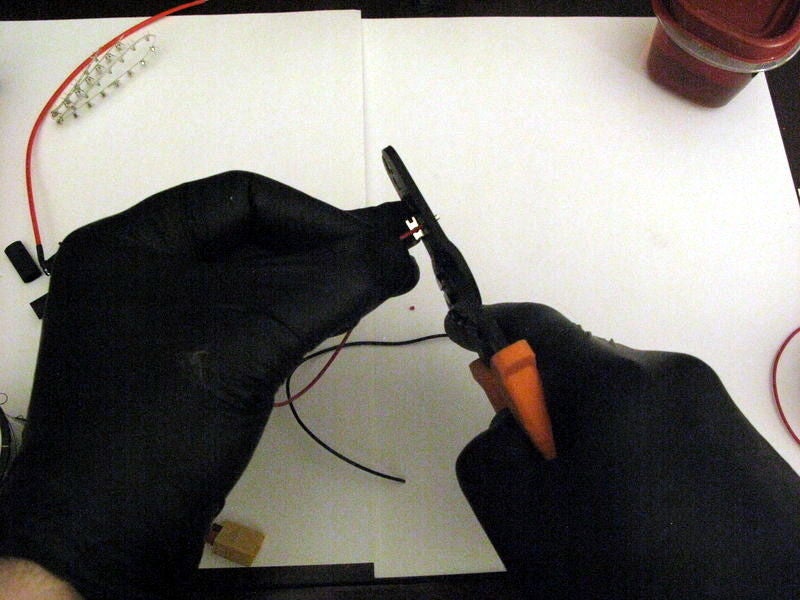
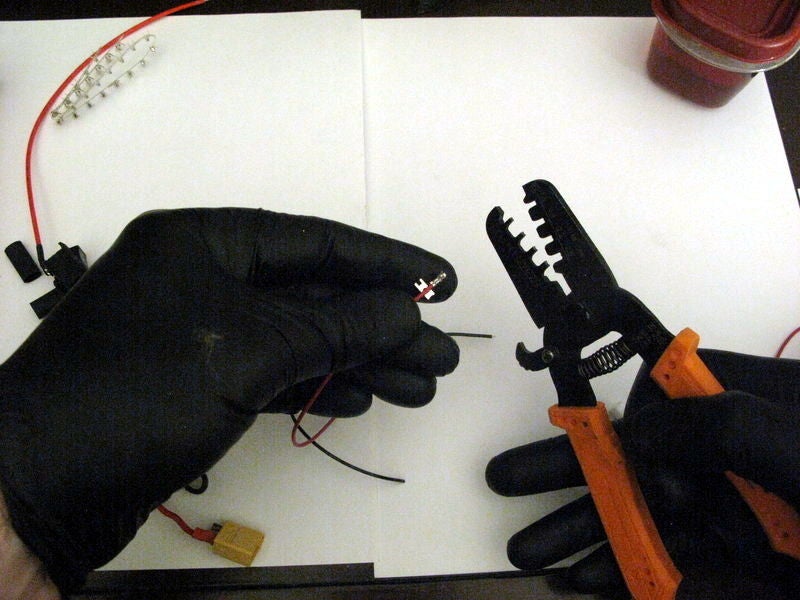
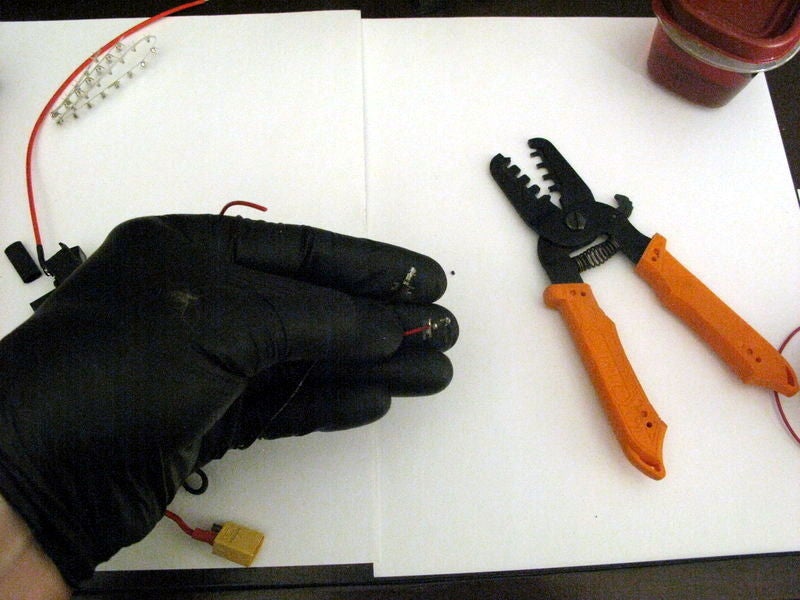
測試每個激光二極管后確保它們工作時,將一個公JST 1.25mm 2pin接頭焊接到激光二極管的每一端。通過切斷電線的邊緣,剝離它們然后包裝和焊接它,我發現了最好的結果。
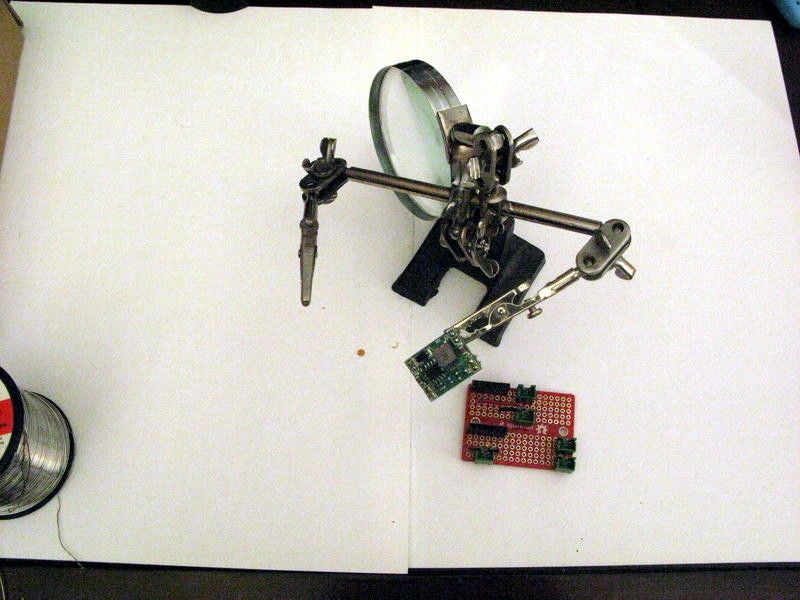
盡可能地,當連接電線時,我嘗試做一個‘lineman splice’確保有良好的聯系。確保在焊接前打開熱縮管。
焊接前,先涂上一滴健康的助焊劑,以確保焊料順利流動。將導線焊接在一起后,將熱縮管放在上面并用熱風槍加熱以使其良好貼合。
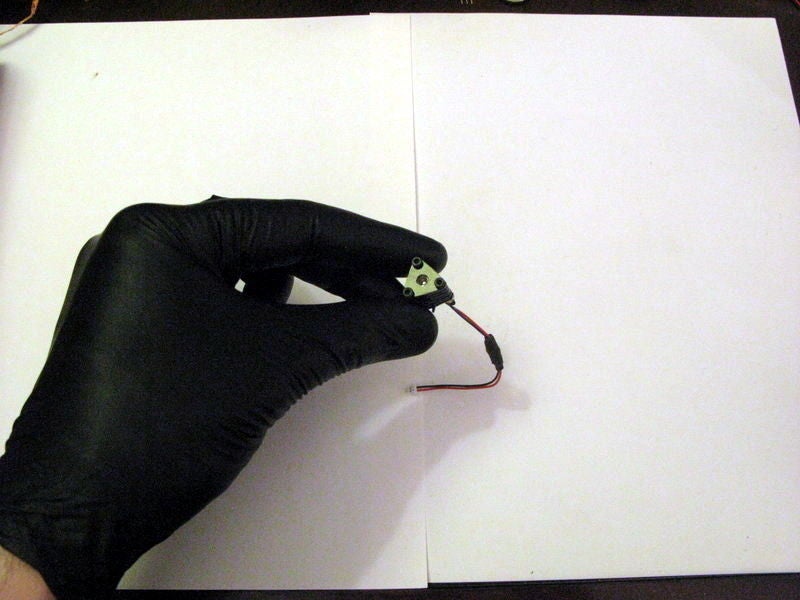
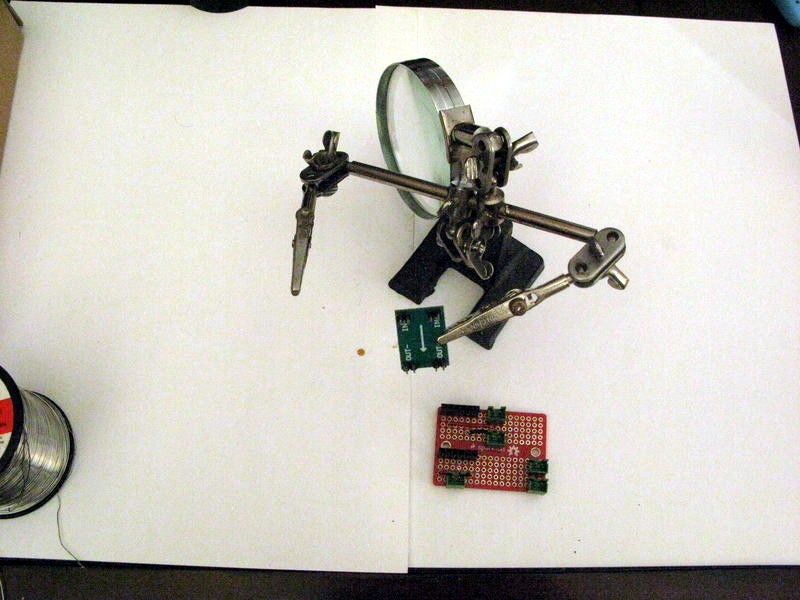
使用熱風槍屏蔽激光二極管和JST末端時要小心連接器。我有連接器不合適的問題,我相信我沒有保護激光二極管JST連接器免受熱量的影響。激光二極管也會對極端溫度敏感,并且可能會因施加過多的熱量而失效。
如果有任何裸露的電線,請用電工膠帶覆蓋。如果由于某種原因熱縮管松動,你可以隨時在另外放置另一個較大的熱縮管并收縮以適應。
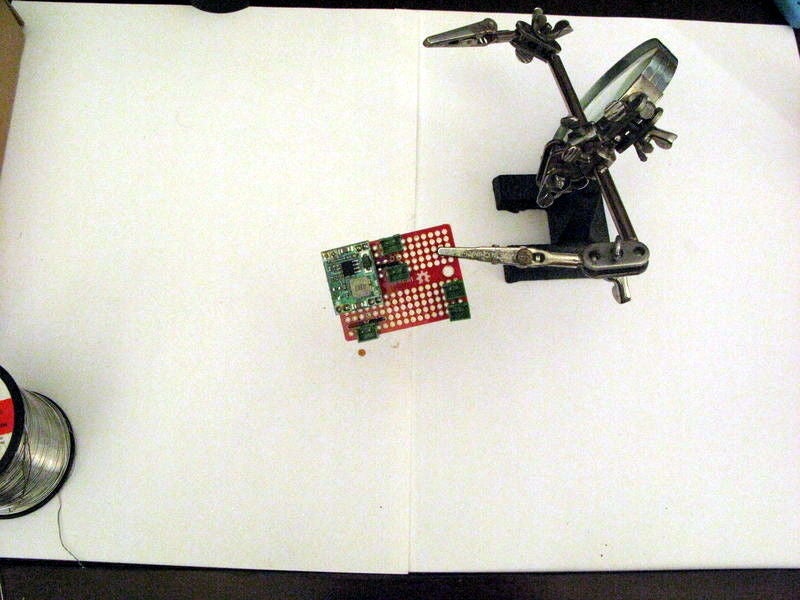
在處理激光二極管時要輕柔,因為連接到激光器的導線輕松脫落。
為128個激光二極管中的每一個做這個。盡可能在連接電纜后測試激光二極管。這可能意味著制作一條“測試電纜”來測試每個激光二極管。
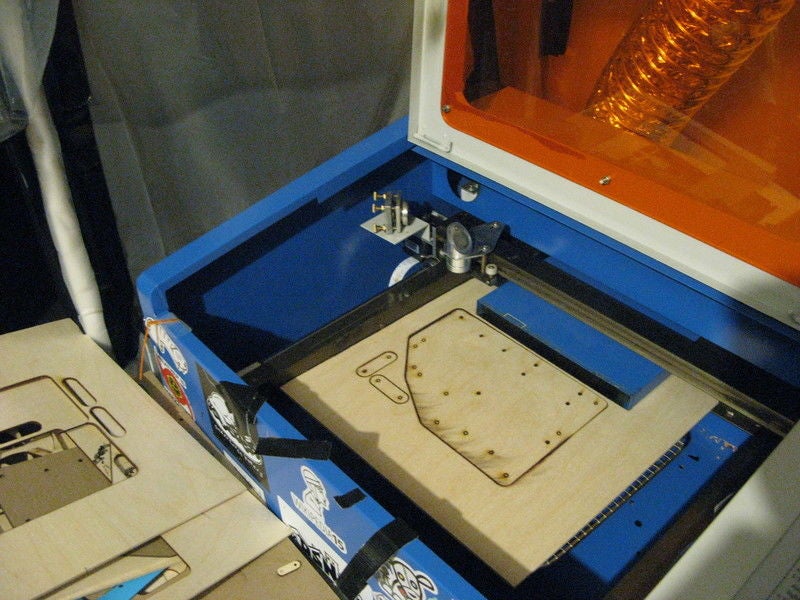
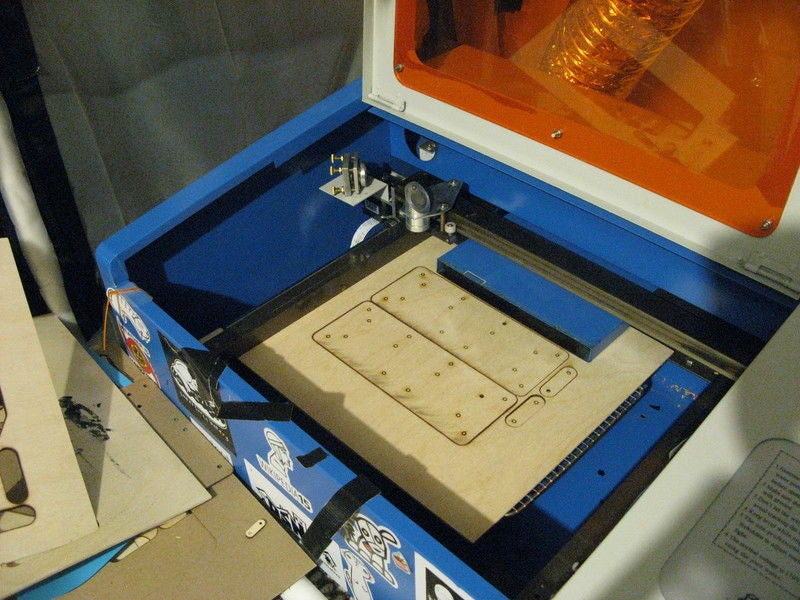
步驟5:激光切割激光二極管外殼模塊

使用激光切割機切割激光二極管外殼。我使用了1/16“黑色丙烯酸樹脂。我的激光切割機的有效工作區域為8”x12“,這使得一片黑色丙烯酸樹脂每次運行時可切割出大約20個激光二極管外殼。
雖然可能很明顯對于使用激光切割機的人比我更多,請確保取下丙烯酸板的紙張保護。丙烯酸切割清潔,通常不會產生火焰,因此不需要任何紙張保護。也常常導致工作著火。
我發現我的激光切割機只有大約30分鐘的操作時間才能使水冷變得太熱,以免激光切割機保持正常工作。高度依賴于安裝的激光切割機和冷卻系統的類型,但需要密切關注。
切割外殼后,我發現有必要拆下較小的內部部件。一個小鎬。我喜歡把丙烯酸片放入成組,這取決于它是否和外部,內部或背襯,以便于以后組裝。
步驟6:組裝激光二極管外殼
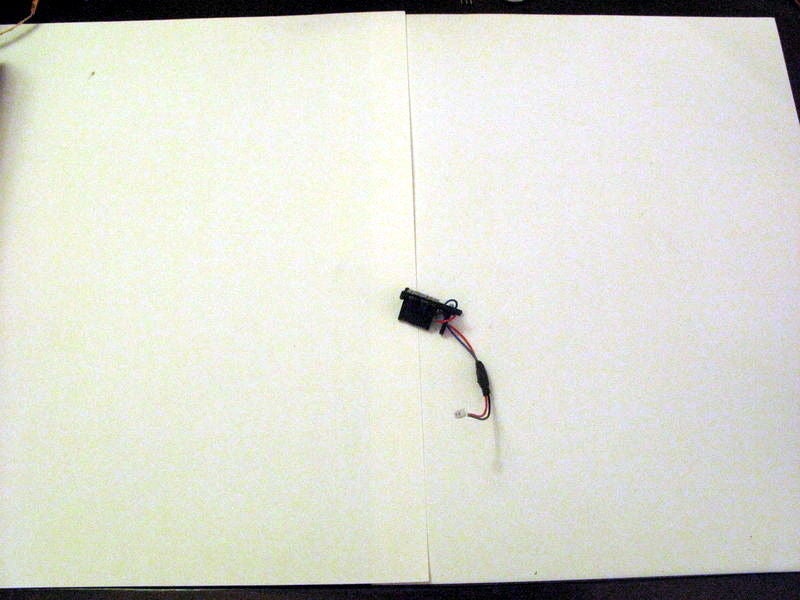
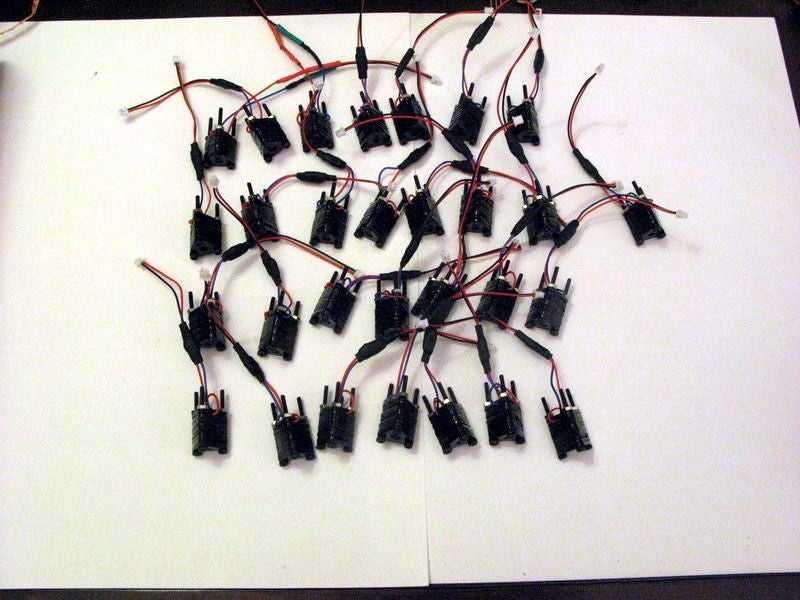
激光二極管連接后的激光二極管外殼都經過激光切割,是時候將激光二極管組裝在外殼中了。這不是完整的外殼,因為在激光二極管連接到護套之前不會有最后的背襯,但大部分激光二極管組件都是在這一步驟完成的。
準備128個有線激光二極管以及一堆丙烯酸外殼件和M2 25mm螺釘和螺母。一個接一個地將每個激光二極管放入組裝好的激光器外殼中。
我發現最好的方法是將兩個M2螺釘穿過頂部外殼板,然后逐步添加六個中間板。我嘗試將兩個M2螺釘放在垂直于中間堆疊板中矩形槽的位置。堆疊中間板時,確保矩形槽對齊。
我將每個激光二極管穿過底板。完成該環路以為導線提供應變消除,使得適度的力不會將焊接的導線與激光二極管斷開。一旦激光二極管通過底板環繞,我就將激光二極管放在堆疊上。
一旦激光二極管安裝在激光二極管外殼疊層中,我就插入第三個M2螺釘并放入三個M2螺釘上的每一個都有一個螺母。我們的想法是將底板擰得足夠緊,以便將激光二極管電纜保持在適當的位置,并釋放任何會在電線上拉出的力。
使用丙烯酸材料制成外殼,應變消除小于非常理想,因為丙烯酸很脆,容易開裂。我發現將螺母擰到位時底板經常會裂開。只要丙烯酸底板提供應力消除,即使它已經破裂,外殼仍然在做它的工作。雖然脆性丙烯酸和潛在的開裂并不理想,但我發現它運作良好。
此項目的任何未來迭代都應提供更好的解決方案來容納激光二極管。
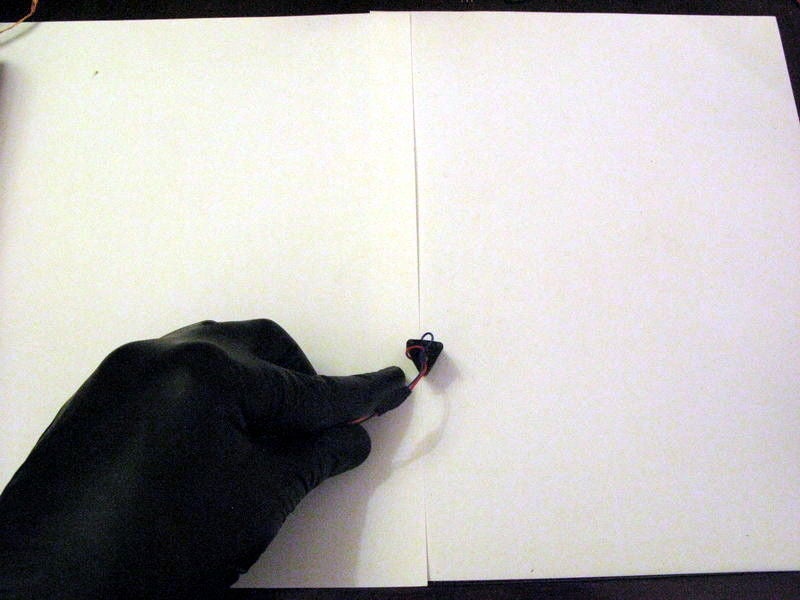
步驟7:將激光二極管連接到護套上






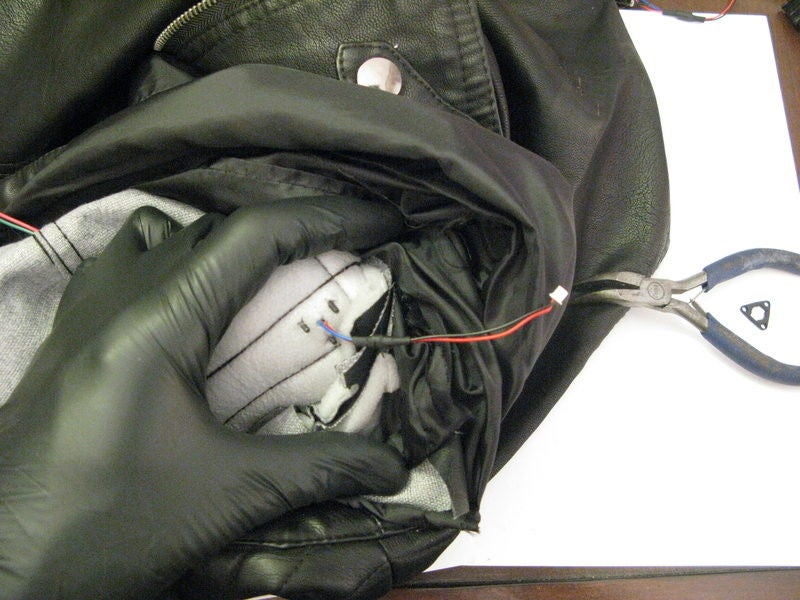
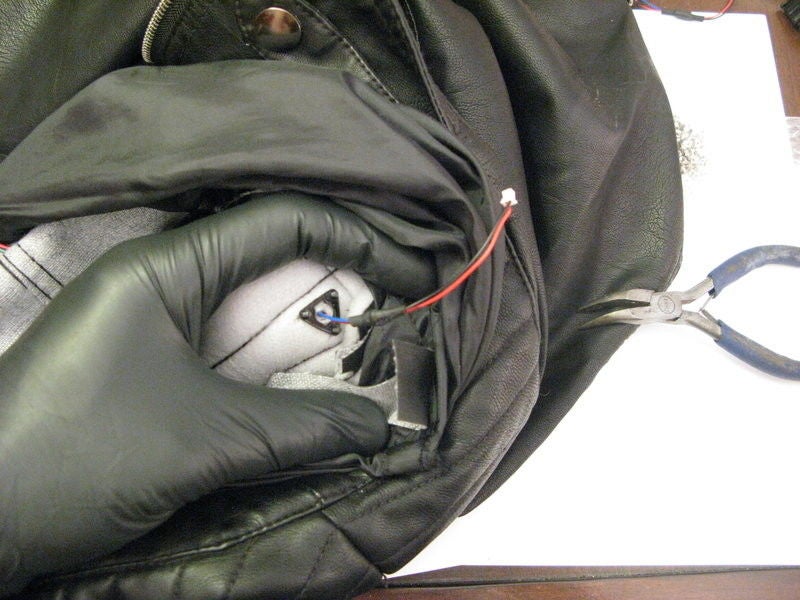



一旦將128個激光二極管放入其外殼中,就應該將它們連接到護套上了。首先,打開夾克襯里,以進入內夾克外殼。最好保持盡可能多的襯里完好無損,因為襯里在穿著夾克時可以屏蔽電纜到你的皮膚,并且還提供了一個方便的位置,可以將電子設備放在視線之外。
我我們發現從中背處縫線是最好的。稍后可以使用按扣或維可牢尼龍搭扣關閉開口。
首先在夾克外側標記圖案,以決定放置每個激光二極管的位置。我最初是用膠帶做的。在放置了前幾行之后,我發現磁帶幾乎沒有必要,因為很容易判斷用眼睛放置激光二極管的位置。
使用激光外殼的中間板作為指導在夾克中每個激光二極管戳四個孔。外三個孔用于M2螺釘將外殼固定到位,中心孔用于激光二極管接線。我使用的是一個古董核桃餅干,但任何鋒利的尖頭物體都會在夾克上形成孔。
電纜的中心孔需要比其余部分大,因為JST 1.25mm公頭更大比M2螺絲。我發現用一把尖嘴鉗擴大孔的效果很好。
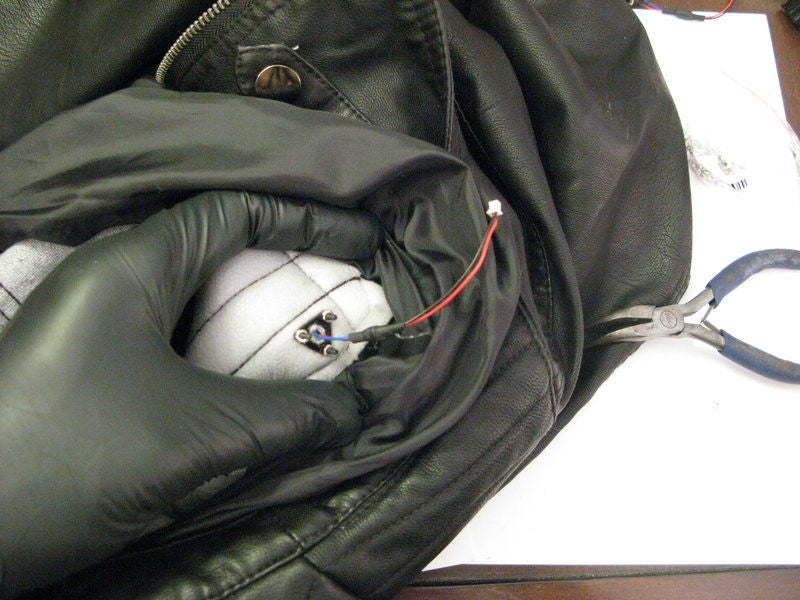
一旦激光二極管外殼的電纜和三個M2螺釘穿過這些孔,夾套外殼的內部需要可以進入以將中間殼體板連接到現在正在穿過的M2螺釘上。對于激光二極管的第幾排,可能需要將護套臂向內翻,但隨著激光二極管進一步連接到手臂上,可以在不完全將手臂向內翻的情況下接觸它們。
將手臂向內翻轉時,請注意不要損壞激光二極管。外殼中的激光二極管應該具有適度的彈性(畢竟,這是它們設計的原因之一),但最好仍然要盡可能小心。
當底部被訪問時,放置一個底部有中心激光器外殼板,M2螺釘穿過三個孔,激光二極管電纜穿過中心。用三顆M2螺絲擰緊板。
一旦連接了所有激光二極管,如果可能的話,測試每個激光二極管以確保它們仍能正常工作。
在此過程的早期測試有助于排除潛在的問題。一般來說,工程和電子設備很難做到,當有更多的電子元件附著在彎曲,碰撞,移動和彎曲的衣服上時,它會使故障發生的可能性更大。
考慮到項目中涉及的元素數量,可以預期失敗,因此請確保手頭有一些額外的激光二極管,以便在檢測到故障時,可以更換激光二極管。
了解組件故障是過程的一部分,當事情破裂或最初沒有工作時不會失去動力。通過測試可以預期,計劃和補償失敗,并確保有更換零件。
一旦所有的激光二極管都連接起來,我們有一些合理的期望它們起作用,現在是時候繼續創建將驅動激光二極管的電子設備。
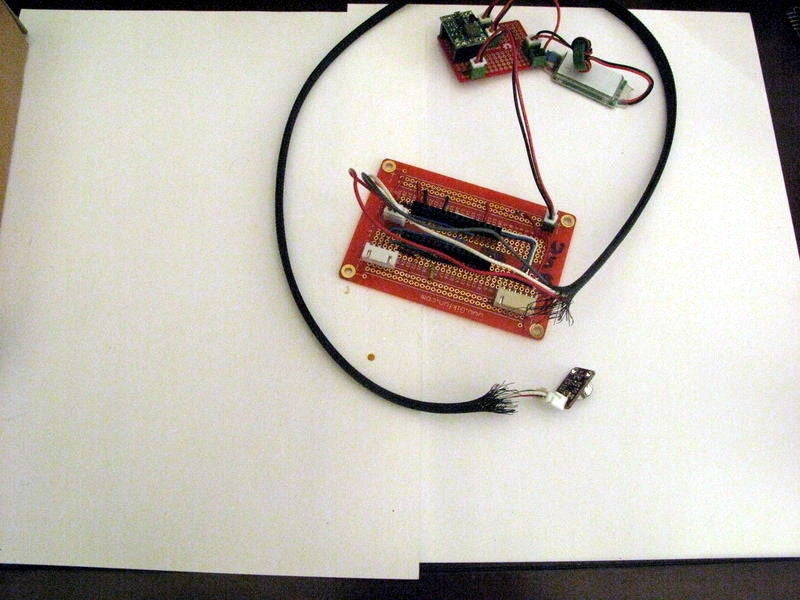
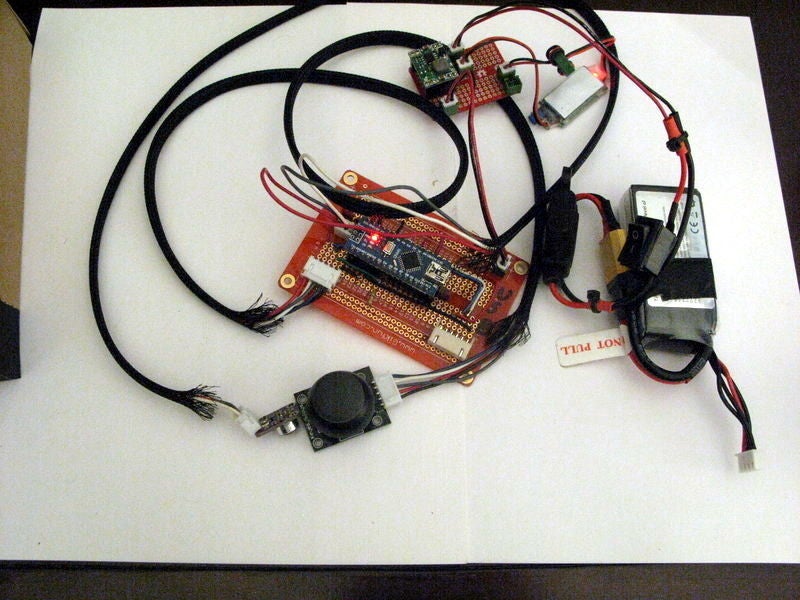
步驟8:電子組裝
電子設備是一對PCA9685 PWM控制器本身由Arduino Nano控制。一個麥克風連接到Nano以允許環境聲音輸入,例如音樂,并且提供帶按鈕的操縱桿用于某些控制。
操縱桿按鈕用于控制哪個‘模式’目前,有三種模式:
Twinkle - 以“閃爍”模式循環激光二極管
圖形均衡器 - 使用麥克風輸入獲取用于控制激光二極管投影模式的圖形均衡器數據
操縱桿控制 - 使用操縱桿直接控制激光二極管PWM驅動器的每個輸出線都饋入四個激光二極管。
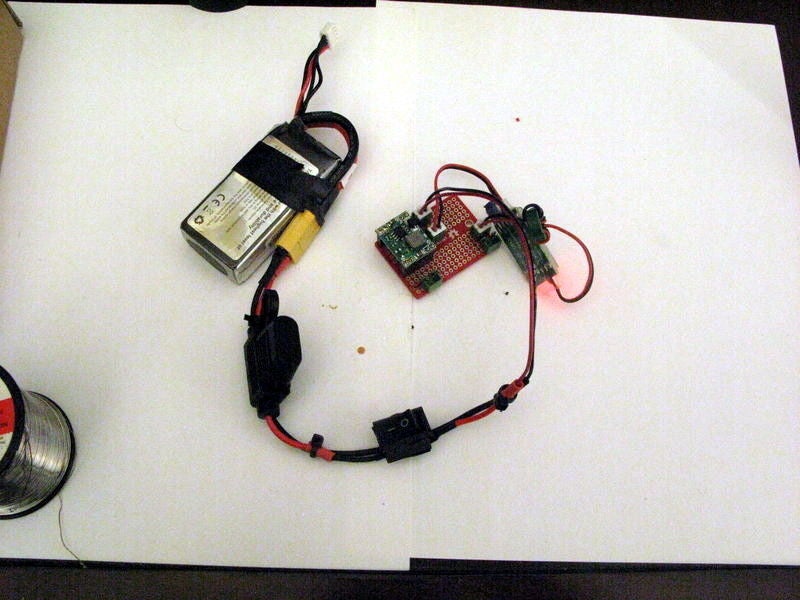
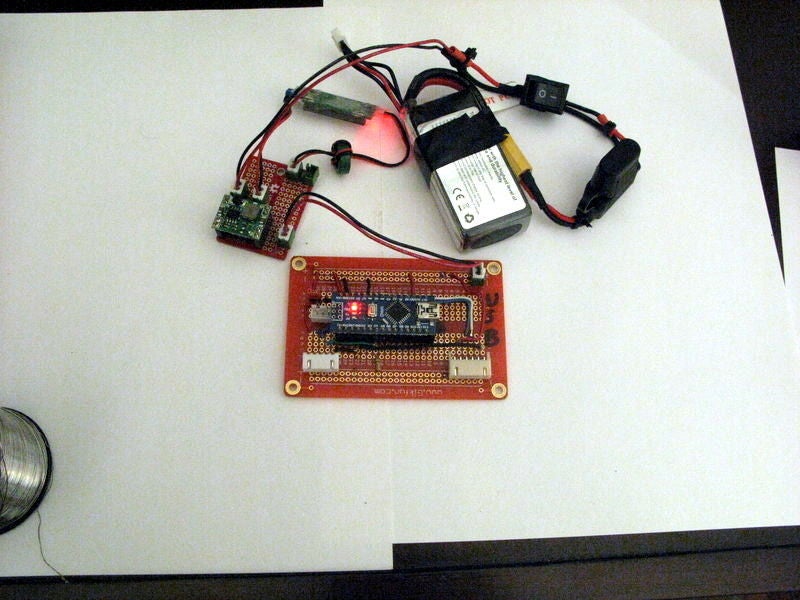
激光二極管由5V 3A“電池消除電路”(BEC)供電。 Arduino Nano和外設上的所有邏輯均由5V降壓轉換器供電。 BEC和降壓轉換器由LiPo 2s電池供電。電池有一個3A保險絲和電源開關的附件。
如上所述,保險絲是一種安全預防措施,以確保任何意外短路不會導致災難性和潛在危險的故障。電源切換是為了便于使用而提供的。
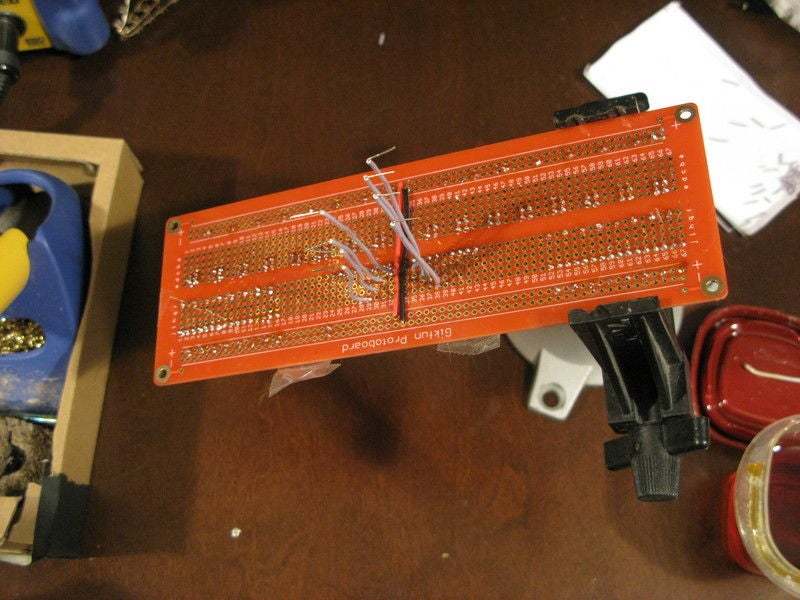
步驟9:電源線







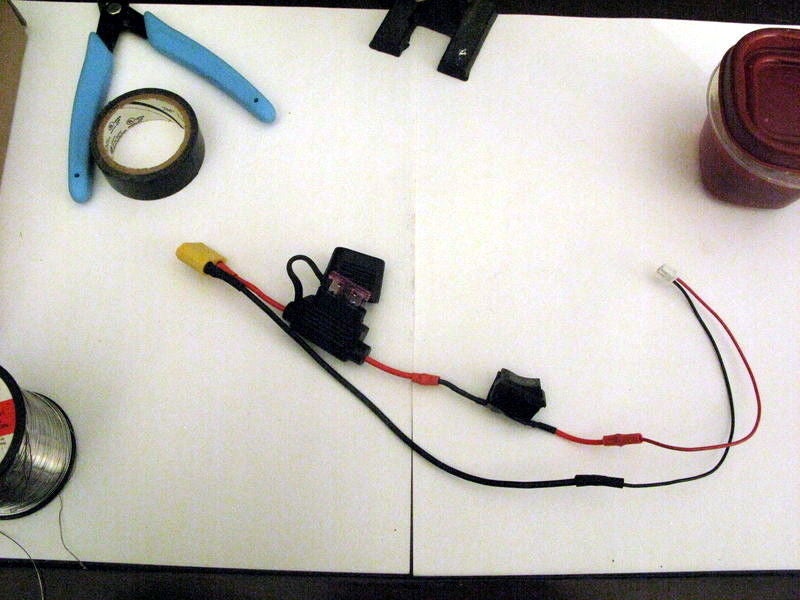
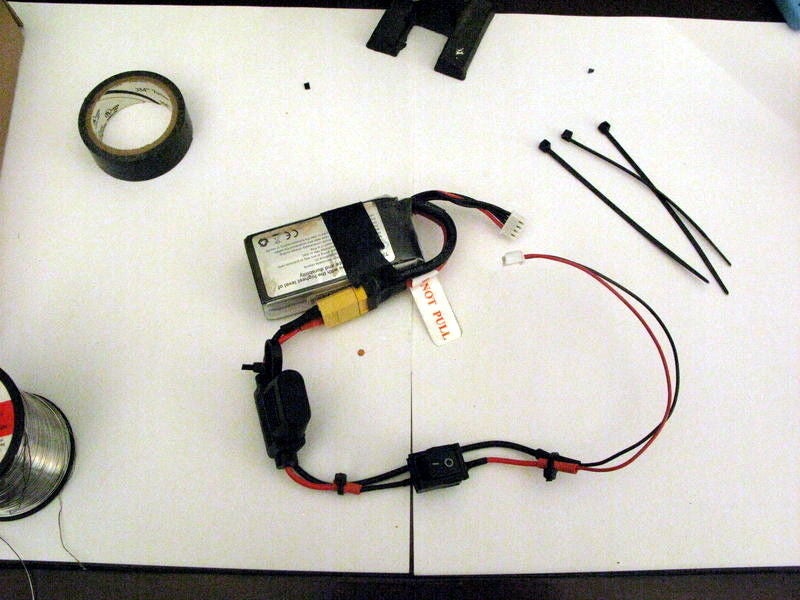
出于安全和方便的考慮,創建并連接了2s LiPo電池的電纜。在焊接或原型制作時,有時很容易意外造成短路。如果在沒有與LiPo電池一致的保險絲的情況下發生短路,電池通常可能通過連接向上推動25A。
在進行原型設計時,我不小心創造了一個短路并且有一個電線發熱并爆炸,導致電線屏蔽著火。保險絲就位后,我沒有火災或爆炸,所以我強烈建議將這個安全功能放入。
我發現20 AWG保險絲座的線徑很好。較大的規格變得難以連接到其他電纜。
將20 AWG保險絲座的一端焊接到母XT30連接器的正極引線上。與保險絲座一致,在未連接電池的一端,焊接電源撥動開關線。對于兩者,確保在焊接前進行熱縮。
對于所有連接線,我認為Lineman拼接是一種很好的技術。當導線很好地纏繞在一起時,添加助焊劑滴并將它們焊接在一起。焊接后,將電線拉得干凈,以確保它們連接良好。
一旦電線牢固連接,將熱縮管送到它們上面,然后用熱風槍將管子收縮到上面。焊接接頭。如果您沒有任何熱縮管或忘記戴上它,請將露出的焊點用電工膠帶包好,以確保它是隔離的。
我將電工膠帶放在撥動開關的底部確保覆蓋任何裸露的引線。
將另一根引線連接到XT30連接器的負極端,確保與保險絲,開關和端部連接器的長度相匹配。
創建2線端連接器,帶JST 2.5mm公頭。我發現24 AWG絞線是一個很好的選擇。
和以前一樣,我認為將JST 2.5mm公頭2線連接器連接到帶有Lineman接頭的電池線是最好的。將導線拼接在一起后,加入一滴助焊劑并將它們焊接在一起,確保在焊接前將導熱管打開。給連接一個凹槽以確保接頭良好,必要時重新焊接。
連接器焊接后,將熱管移到暴露的接頭上并使用熱風槍收縮熱量管道到位。
我發現布線有點松動,所以我放了一些電纜扎帶,以保持它的清潔和自包含。
確保將3A保險絲放入保險絲座。
將電池連接到電源線。
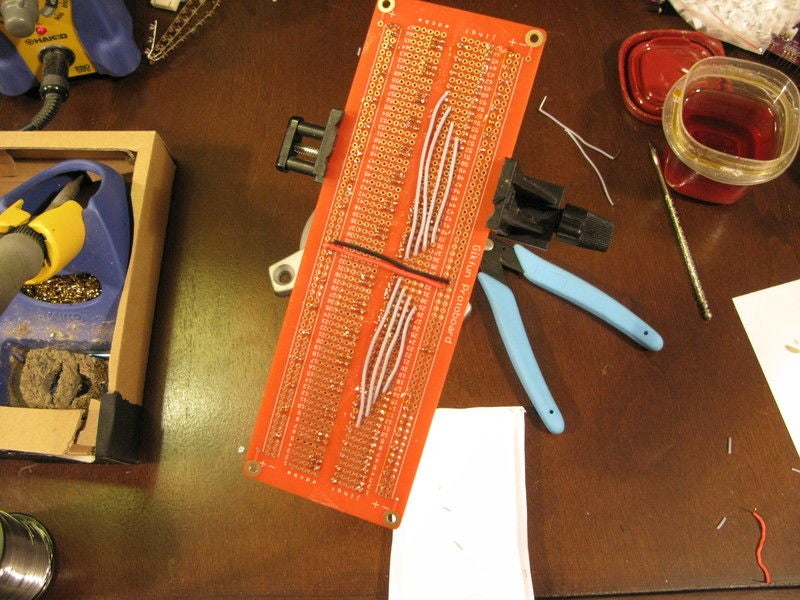
步驟10:電源調節器
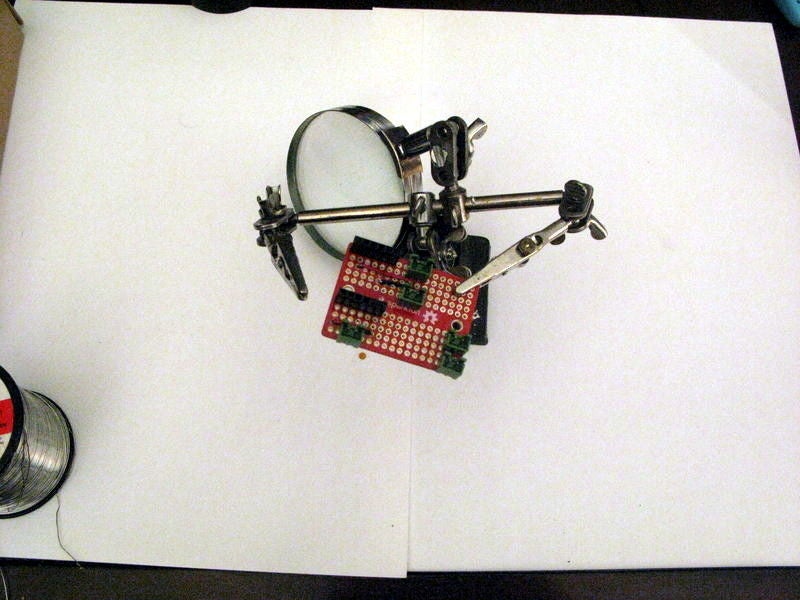
我們現在將為電源穩壓器構建分線板。我沒有測量但是我懷疑激光二極管每個可以吸收5mA(這是它們的額定值),使整個系統以?.75A作為上限。
因為功耗是與其他電子設備的功率消耗相比,激光二極管具有顯著且高度可變的特性,已經使用單獨的調節器來確保激光二極管功率和電子功率盡可能隔離。如果沒有這種隔離,Arduino可能會因為電路的噪音而起作用,并且其他輸入設備可能無法正常工作。
分線板將電源從電池轉向5V降壓轉換器并轉向5V 3A BEC。 5V降壓轉換器為Arduino Nano和其他邏輯電路供電。 5V 3A BEC為激光二極管供電。
有時穩壓器會出現故障,因此盡可能讓它們可以更換。
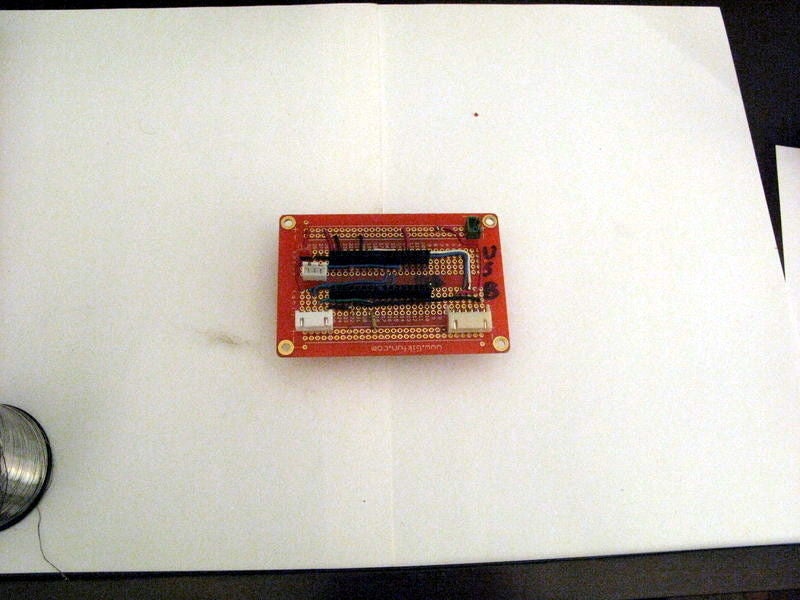
對于5V降壓轉換器,焊接四個2針標題在適當的位置。對于BEC,切斷兩端并重新連接兩個2針JST 2.5mm公頭,如果看到帶有凹口側的頭部,確保正極引線位于頭部的左側。
將兩個6x1排女性標頭焊接到主板上。使插頭的垂直間距與降壓轉換器的高度匹配。接頭將為降壓轉換器提供座位。
將五個2針母頭連接到主板,一個在頂部用于電池供電,三個在右側用于電池供電到BEC和左側最后一個用于5V穩壓器的輸出。
右側三個2針母頭中的兩個用于BEC的輸入和輸出。最后一個2針母頭用于BEC的輸出,用于為激光二極管供電。
使用連接線確保所有電源都路由到適當的位置。
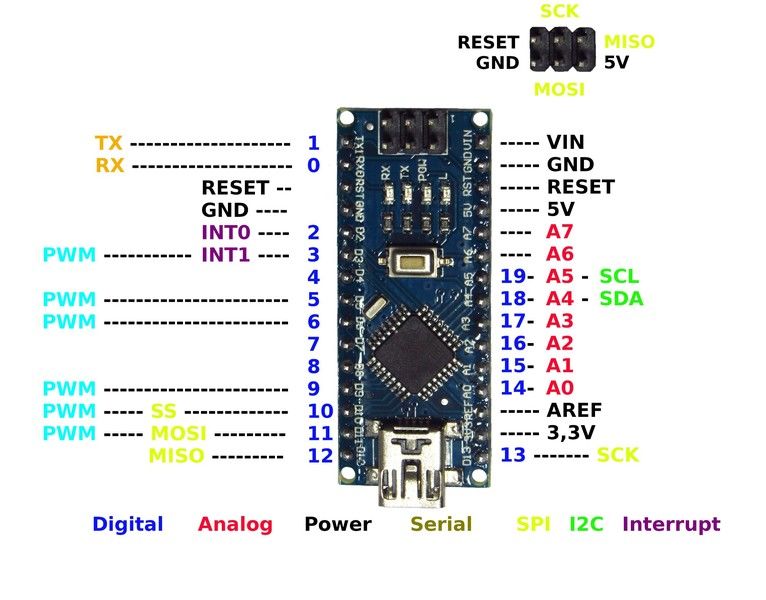
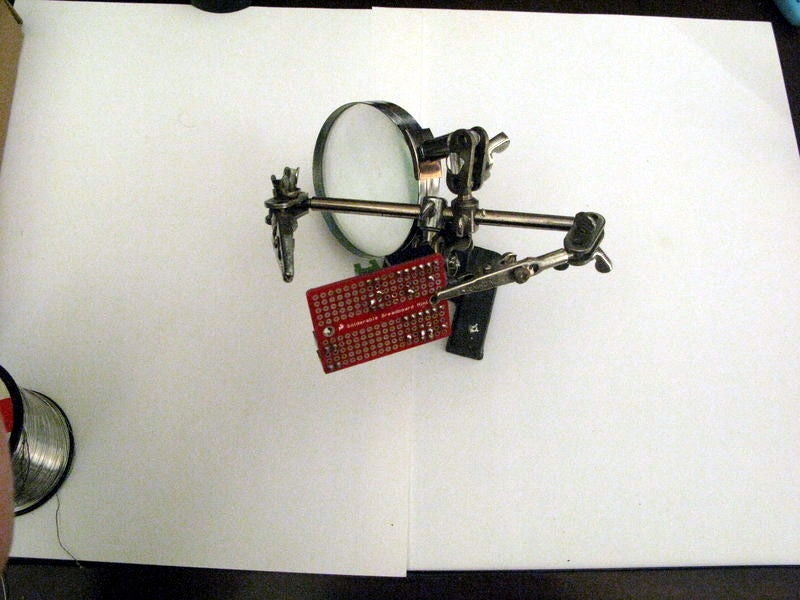
步驟11:Arduino和輸入突破
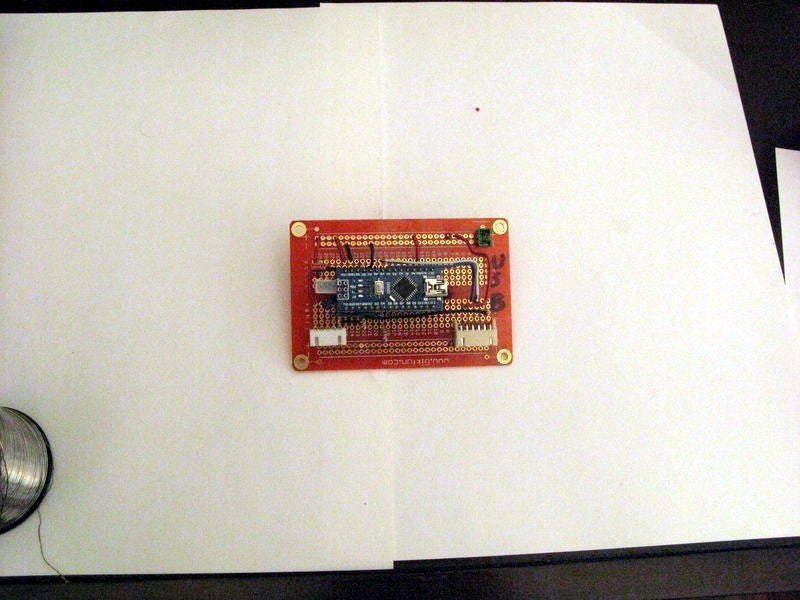
Arduino Nano提供主要的處理智能,從麥克風和操縱桿輸入并與PWM驅動器通信。
電路的基本布局是突破適當的引腳,以便路由到PWM控制器的I2C線路,讀取操縱桿和按鈕的輸入線路,麥克風的輸入線路以及需要突破的各個部分的電源路由
唯一的額外組件是10k電阻,以確保操縱桿上的按鈕線浮動高。
焊接時,確保使用焊劑,因為它有助于焊料流動和防止冷關節。作為一般規則,使用萬用表測試連續性是一個好主意。作為一項基本的預防措施,請確保電源和接地是通過確認它們之間沒有連續性來隔離的。
焊接完成后,通過去除多余的接線來清理底部。
一旦突破準備就緒,將兩個1x15標題行放入母頭。將Arduino Nano放在1x15接頭的短端,涂上助焊劑并將接頭焊接到Arduino Nano。在母頭中安裝公頭,確保它正確對齊。
一旦將Arduino Nano的接頭焊接并放置在分線板上,我們就可以對其進行編程。
步驟12:編程Arduino Nano
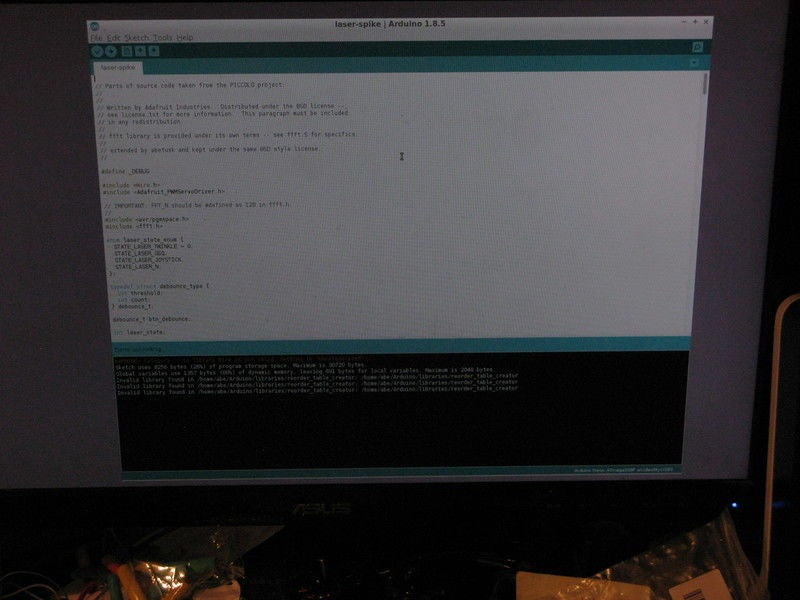


使用USB線將Arduino Nano連接到計算機并啟動Arduino IDE。如果尚未安裝,請安裝Adafruit PWM庫和傅立葉變換ffft庫。如果通過IDE無法使用這些庫,請下載每個庫的zip并將它們放在Arduino庫目錄中。有關更多信息,請參閱Arduino對庫的參考。
Adafruit PWM伺服驅動器用于與PCA9685 PWM驅動器通信。這個ffft庫用于Adafruit的Piccolo音樂可視化項目,以提供圖形均衡器。 Piccolo項目有很多預先設定的值,以確保圖形均衡器在視覺上很有趣,因此它是分析麥克風數據和進行可視化的良好起點。
激光尖峰程序有一個DEBUG標志,可以創建該標志以查看串行輸出以進行調試。之后,當創建激光二極管的分線板時,我們將進行測試以確保外觀良好。如果出于某種原因,事情無法解決問題,取消注釋DEBUG關鍵字可以幫助追蹤錯誤發生的位置。
步驟13:PWM突破

PCA9685 PWM控制器沒有直接焊接到主板上,而是安裝在接頭上。激光二極管不是由PWM控制器直接驅動,而是由2n2222晶體管供電,其柵極連接到PWM控制器輸出。
每個PCA9685 PWM控制器都位于其自己的原型板中。 PCA9685 PWM控制器的每一條線都饋入2n2222晶體管的柵極。然后晶體管為激光二極管提供電源。每個PCA9685 PWM控制器有16條線路,因此需要16個2n2222晶體管。
2n2222晶體管的線路用于通過母JST 2.5mm連接器為激光二極管供電。電路板的激光二極管電源由5V 3A BEC輸出供電。 PWM控制器的邏輯電路由5V降壓轉換器供電,但由用于I2C連接的6引腳連接器提供。
有兩個PWM控制器,每個都有自己的原型板。一個PWM控制器將安裝Arduino Nano分線器和功率調節器分線器。另一個PWM控制器將位于其自身的外殼上,最終放置在護套的另一側。
每個PWM控制器都位于護套的兩側,以便更好地接觸它們將驅動的激光二極管。
每個PWM控制器負責控制64個激光二極管。由于PCA9685 PWM控制器的每條輸出線僅有16條線路,因此每條輸出線路為一組4個激光二極管(16 * 4 = 64)供電。兩個PCA9685 PWM控制器控制64個激光二極管,每個激光二極管驅動總共128個激光二極管。
值得注意的是,即使PWM控制器安裝在大型原型板上,空間仍然是一個問題。布線。我發現使用原型板的頂部和底部有助于控制電線管理。我將控制線從PWM控制器輸出連接到晶體管的方式意味著導線的焊點將落在其上方的其他線的中間。為了確保焊接不會損壞電線,我發現焊接錯開,首先只做頂部和底部電線的一側,然后再向下進一步,比一次焊接完整的頂部或底部更好的方法。
步驟14:PCA9685模塊焊接和尋址
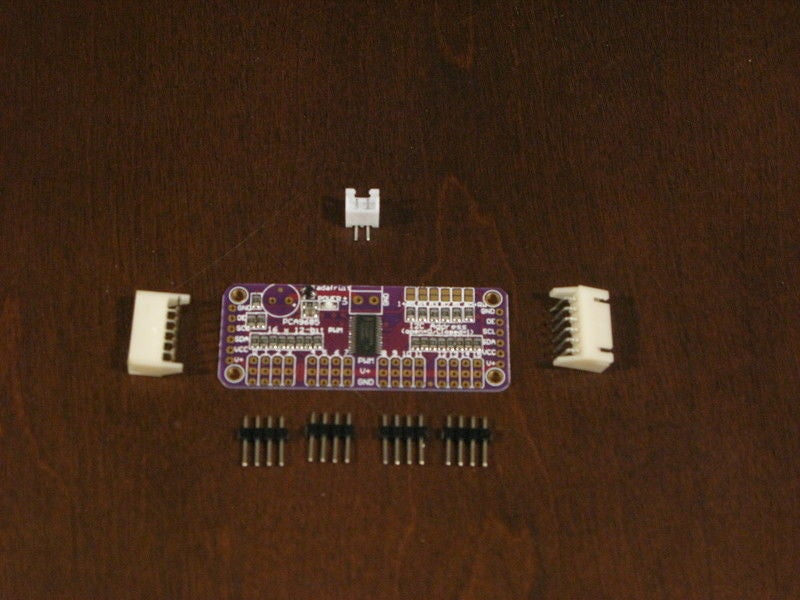
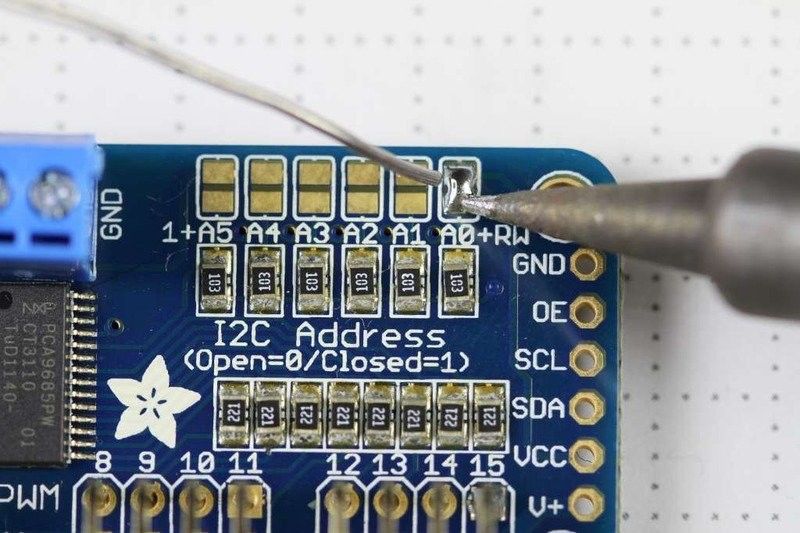







由于有兩個PCA9685 PWM控制器與Arduino Nano通信,因此它們需要具有單獨的地址,因為它們共享通信線路(也是被稱為“公共汽車”)。僅在一個PCA9685 PWM控制器上,連接“地址”分線焊盤上的低位。對于單個PCA9685 PWM控制器,這會將其地址更改為0X41(默認值為0x40),因此Arduino Nano可以獨立地對其進行尋址。
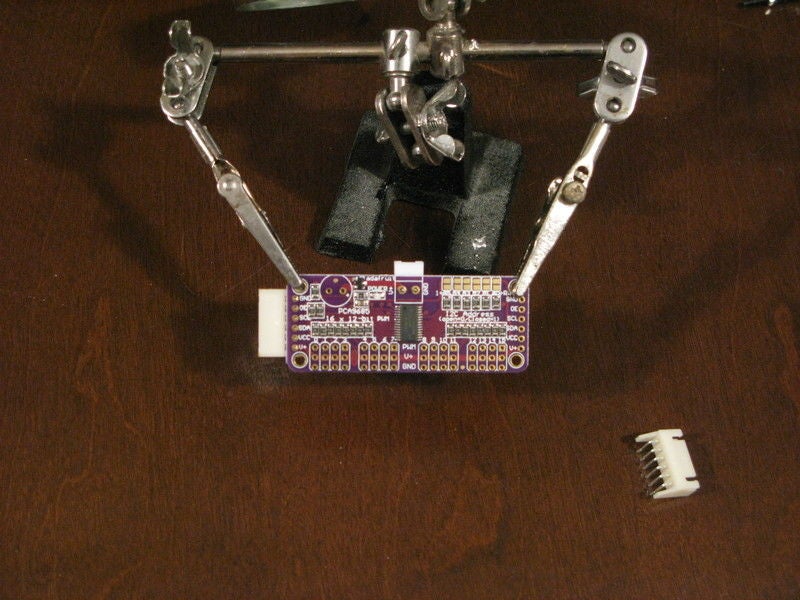
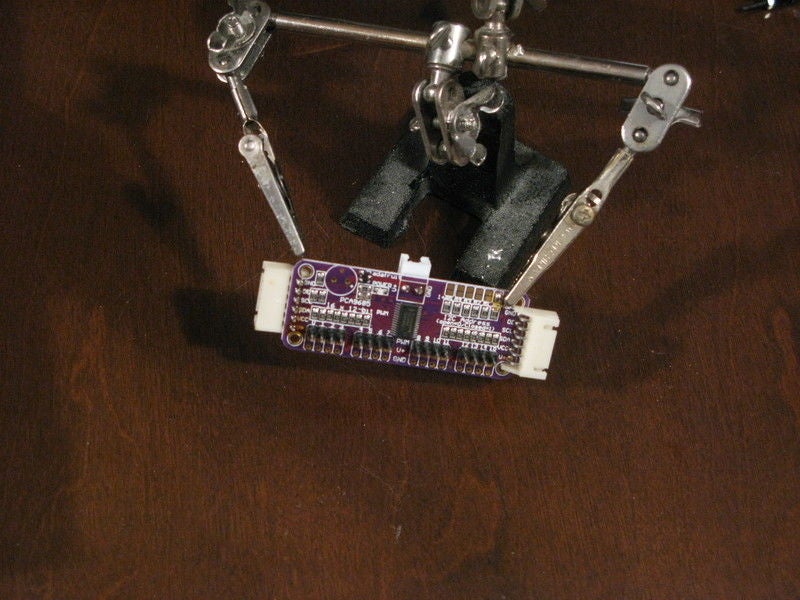
兩個PCA9685 PWM控制器的焊接頭。由于我們只對PWM輸出感興趣,因此只為每個PWM控制器上的四個PWM輸出分組中的每一個焊接一行1x4接頭。這將是PCA9685 PWM控制器安裝在分線板上的方式。我發現使用相同的技巧將頭部放置在它們最終存放的母頭中有助于在焊接時保持它們筆直。
我在PCA9685模塊的兩側使用JST 2.5mm,定向和鎖定6針母連接器。為了保持電纜順序相同,將一個母頭焊接到PCA9685模塊底部的另一個頂部。
步驟15:PCA9685模塊布線



連接接頭后,再制作兩根6芯電纜,一根約20厘米長,另一根約75厘米。我使用了一個定向鎖定JST 2.5mm 6針連接器。確保從Arduino Nano電纜分支到PCA9685模塊的電線訂購正確。如果由于某種原因導致方向顛倒或混亂,請重新訂購電纜布線以便容納。
我喜歡使用電纜護罩進行長電纜以防止纏繞。我還嘗試使用不同顏色的電纜來區分它們的功能,并更容易確定是否存在電纜排序不匹配。
步驟16:激光二極管的接線和布線



激光二極管分為四個,由單個PWM驅動器線供電和控制。用于此的電纜是一端為JST 2.5mm公頭,可分為4個JST 1.25mm母頭。盡可能地,我嘗試使用Lineman接頭并用熱縮管覆蓋每個連接。如果沒有熱縮管或在焊接前沒有戴上電熱帶,可以使用電工膠帶。
每根電線應測量為四個激光二極管與電子元件組合的大致長度住房。這意味著臂末端的激光二極管的導線應該比肩部或背部長。
每根導線都放在電纜套管中以防止纏結。我發現1/4“編織套管效果很好。
為了幫助將套管電線穿過外殼護套和內襯之間的臂和中間接口,我連接電纜夾,用一個封閉的電纜扎帶,連接到夾克臂內側的一些浮動多余的織物上。
必須注意確保接線正確地從接線臂中送出。如果接線回路在襯里周圍,這會捏住手臂穿過的開口,使夾克難以穿上和使用。
我試著貼上電線,這樣我就可以追溯到屬于哪個電線但是我沒有取得多大成功。
我建議用CR2032電池測試激光二極管,以確保激光二極管在安裝和連接后仍能正常工作。
一旦所有激光二極管連接到各自的導線,就可以開始最終裝配。
步驟17:測試
開始之前我們需要暫停并確保一切正常。在此之前,我們只能通過連續性或測試單個組件來了解事情是否有效。這將是一個完整的“集成測試”,它將在完整安裝之前測試幾乎整個系統。
測試不完善但有助于在早期跟蹤一些常見錯誤。當然,最后的測試是在完全裝配后是否有效。這里的測試旨在確保我們確信系統的性能足以進行下一步。
步驟18:測試準備
從堆中挑出備用的激光二極管,方便使用。拿一個CR2032電池并通過將激光二極管的裸露引線按到電池的頂部和底部來確保激光二極管正常工作。紅線應位于CR2032的“頂部”(正極引線),黑色或藍色線應位于電池的底部(負極)。激光二極管應該點亮。
制作一個臨時測試電纜,該電纜由JST 2.5 2針公頭和兩根斷開的電線組成。剝去這兩根導線的末端并取一個備用激光二極管。
插頭電纜剝皮端的裸露引線將用于測試PCA9685突出部分外的每個連接上的激光二極管電路板。
步驟19:激光二極管連接器測試


確保Arduino Nano和其他電子設備有電。打開電源后,Arduino Nano上的LED應顯示BEC和PCA9685模塊上的各種LED,以指示它們正在工作。
連接上面創建的JST 2.5 2pin接頭和電線到PWM驅動器分線板上的輸出接頭。將激光二極管連接到裸露的導線并確認其已通電。
Arduino Nano的默認模式應該是“閃爍”,因此激光二極管應該經歷一個增加功率的循環然后昏暗。輕輕擺動激光二極管連接,確保沒有松動的連接會導致斷電。
通過每個連接以確保它們都能正常工作。
這里的間歇性失敗很可能會成為未來的徹底失敗。將電子設備放入衣服并將它們推到一起可以為穩定的測試和開發環境中的間歇性故障提供充足的機會,使其成為現實環境中的永久性故障。
在此階段解決問題,即使間歇性或難以重現,在拆卸和調試將更加困難時,可以節省心痛。
請參閱“常見錯誤”部分,幫助追蹤問題,如果發生任何問題。
步驟20:布線和連接


為夾克中的電纜布線和提供結構支撐有助于磨損和耐磨性。
所有未直接焊接到原板上的電線都是擱淺的。除了一些電池接線外,所有導線都是25 AWG。在可能的情況下,將導線放入導線罩中以確保它們不會纏結。
除了直接連接激光器外,所有接頭均為JST 2.5mm,鎖定和定向。如前所述,鎖定是必要的,以防止斷開應變或移動。該方向提供安全檢查,以確保不會發生短路或不正確的連接。
提供多層應變消除,以盡量減少電線磨損或焊點斷裂的可能性。電子裝置外殼具有應變消除支撐,用于將電纜穿過以提供焊接連接器的應變消除。夾套具有電纜夾以引導電纜并提供支撐。激光二極管外殼為激光二極管提供應力消除。
即使有所有應變消除和電纜布線,也可能會撕裂導線或斷開連接。穿上夾克時不得不小心,不要將手指從襯里上抓住。夾克具有足夠的彈性,可以穿著和跳舞,但過于刺激或過高的撞擊會導致損壞。
步驟21:電源,I2C,操縱桿和麥克風連接
來自穩壓器的電源需要到達Arduino和PWM控制器。 Arduino Nano還需要與PWM驅動器通信。操縱桿和麥克風需要延長線。
激光二極管電源線是一組四個2針JST 2.5mm公連接器。至少一個長度應為75厘米,其余長度在20厘米的范圍內。 Arduino Nano電源線是一根20厘米長的8針JST 2.5毫米公連接器電纜。正確的PWM控制器還需要一根20厘米長的2針JST 2.5毫米公連接器電纜。
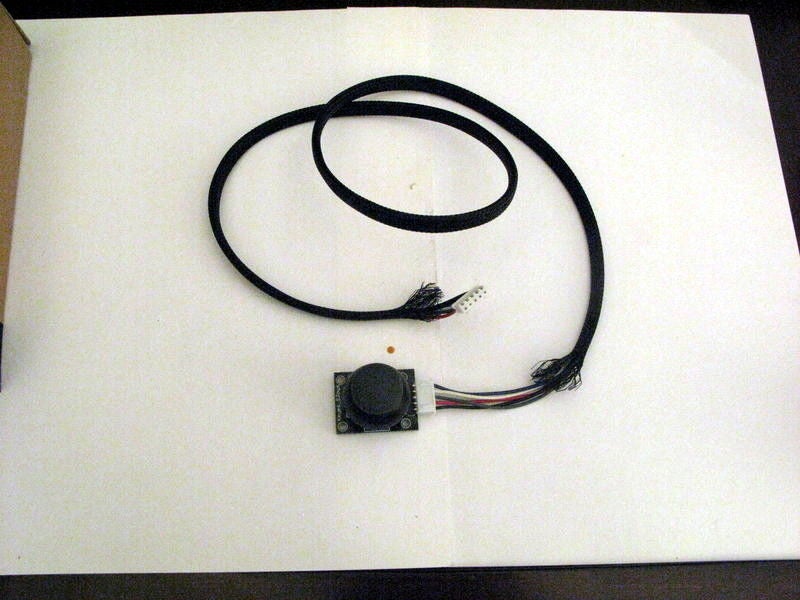
操縱桿連接器的長度約為50厘米的五線JST 2.5毫米公頭。
麥克風連接器長度約為50厘米的3針JST 2.5毫米公頭。
PWM控制器需要兩根6根電線,一根長約20厘米,另一根長約75厘米。它們每個都有6針公頭JST 2.5mm接頭。
所有接頭都是定向和鎖定的。
所有電纜都應由25 AWG絞合線制成。實芯線太硬,不僅限制運動,而且有可能磨損和斷裂。絞合線更易于移動,更適合在不位于同一原型板上的元件之間提供電源和通信。
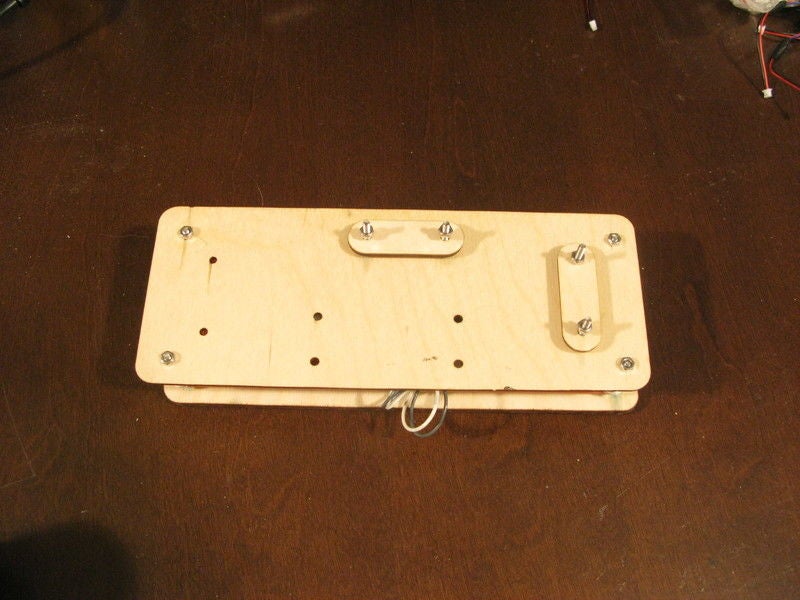
步驟22:電子外殼

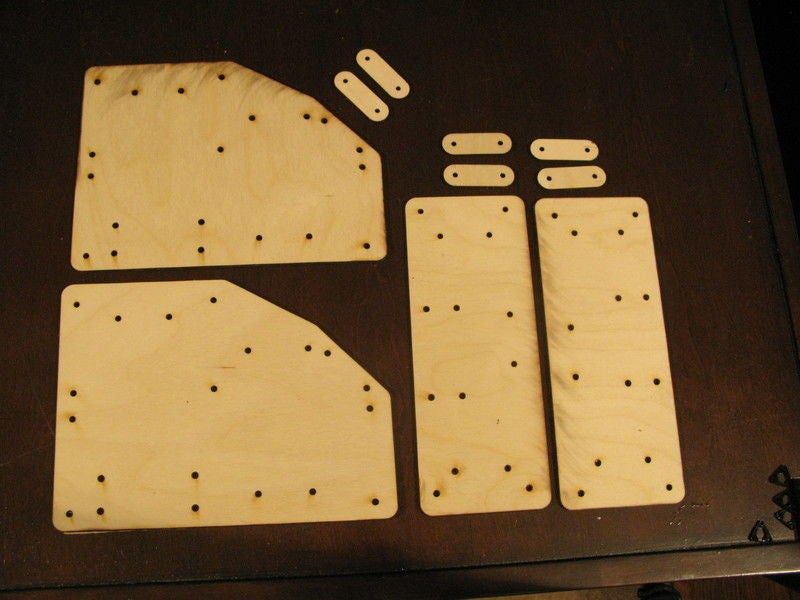
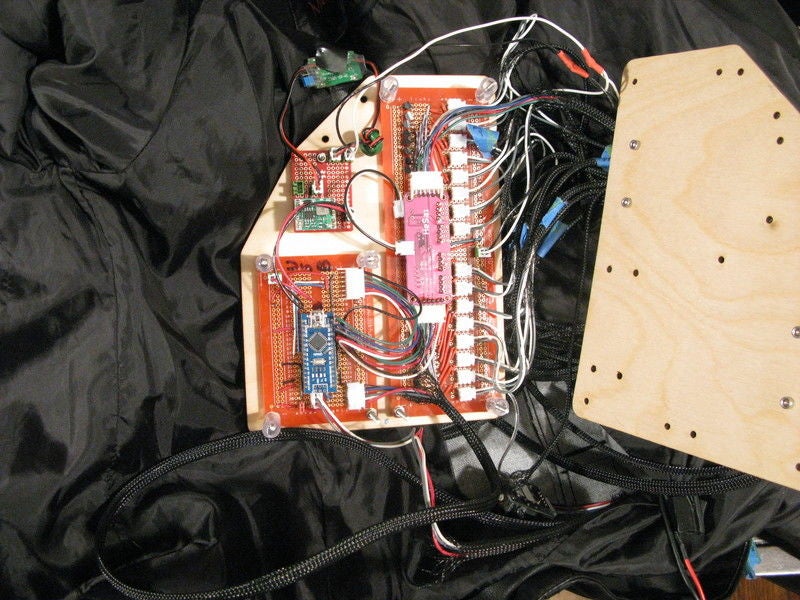

PWM驅動程序以及其他電子驅動程序電源轉換器和Arduino Nano等元件安裝在激光切割電子外殼中,由兩塊激光切割木板組成,中間有塑料管,用于間隔。電子外殼與各種M3螺釘連接。 M3螺釘提供雙重功能,可作為兩個外殼面板的墊片,并為原型板提供支撐。
另一個PWM驅動器將靠近另一個臂并具有自己的外殼。
在關閉電子裝置外殼之前,請確保已連接所有電線。這意味著連接了麥克風,操縱桿,電源線,I2C電纜和左臂的所有激光二極管連接。
對連接到激光器的所有電子設備進行測試運行是一個好主意。二極管,以確保在電子設備外殼關閉并安裝在夾克中之前工作正常。
步驟23:應變消除

一旦將電子外殼外殼用螺栓固定在一起,電線應纏繞在外殼頂部的應變消除裝置上。這是必要的,因為正常運動產生的應力會磨損模板上的連接器,并可能導致連接松動,斷電和其他故障。
應該擰緊夾子,使其能夠承受來自導線的良好沖擊。
最后,應在所有需要保持在位的螺栓上放置藍色的樂泰。直到有足夠的信心確保夾克準備好后才能做到這一點,因為在使用樂泰后堅果難以脫落。
步驟24:最終放置和安裝








將電子設備外殼放在護套外殼和內護套襯里之間的中間位置。使用Velcro綁帶確保電子設備外殼牢固就位。
將麥克風送到可能會發出聲音的地方,如果需要可以刺破一個洞。操縱桿可以通過手臂進給或保持在夾克內側,具體取決于喜好。
使用Velcro或按扣來關閉被切開的襯里。
一旦所有組件都到位,請嘗試穿上夾克以確保工作正常。連接應具有適應性的適應性,但應注意確保組件不會受到過度磨損或拉傷。
如果在整個系統或單個激光器中出現任何故障二極管,每個都工作,直到一切按預期工作。請參閱“常見錯誤”部分以解決我經常遇到的一些問題。
步驟25:磨損
一旦解決了所有問題穿上它!
第26步:最終設計筆記
我認為有一些重要的興趣點值得一提。這是一個列表,沒有特別的順序:
激光二極管的功率為5mW,不會對人的視力造成重大風險。雖然人們不應該直視瞄準激光二極管,但它類似于直接瞄準手電筒。..。..如果沒有向外看而已,但沒有被意外蒙蔽的真正危險,那就太糟糕了。
應變消除是一種必須涉及所有組成部分。如果沒有它,從激光二極管中出來的電線就會被拉掉,而原型板上的連接會變弱。
確保原型板支撐在更穩定的基板上,如激光切割木質外殼,防止從原板上彎曲,這有助于減輕斷裂,弱接合和其他故障的發生。
LiPo電池有一個與之相符的保險絲,可防止產生超過3A的電流。一位朋友建議我在設置好許多項目之后這樣做。由于我一直在使用與LiPo一致的保險絲,我很高興地報告說我沒有一根電線爆炸,或者我的任何一件夾克著火。
沒有主動駕駛在主電源吸收單獨的調節器上的電子設備我有噪音引起的主要問題,特別是當涉及通信或音頻傳感時。在這個項目和其他項目中,我確保從5V穩壓降壓轉換器和主電源組件(在這種情況下是激光二極管)的電源組件(Nano,PWM控制器等)來自另一個調節器,在這種情況下5V 3A BEC。
一般來說,我喜歡定向和鎖定接頭,尤其適用于電源連接。方向可防止意外反轉地面和電源。鎖定機構可防止連接松動。由于要佩戴電子設備,因此如果組件被推擠,則鎖定機構可防止集管脫落。如果需要在現場進行連接,則方向有助于防止誤接線。
對于嘗試此項目的任何人,請了解您正在進行的工作。我有足夠的風險親和力,不介意危險,但對于那些可能更厭惡風險的人,你可以理解參與這個項目的LiPo電池可能會造成嚴重的身體傷害。
LiPo電池有足夠的能量著火,爆炸,否則會造成潛在的嚴重身體傷害。
我個人認為該技術足夠安全使用(我很高興穿上我制作的夾克但是短褲會引起火災,水暴露會導致短路或其他潛在的危險情況,電池爆裂或破裂會導致嚴重的身體傷害。
在我開始使用保險絲作為安全措施之前,我的電線爆炸,夾克著火,因為我的布線短路(僅在開發過程中,從未實際穿著它們參加活動)。
做你的研究以確保你理解所涉及的風險以及您感到滿意的風險程度。
以下是我認為使用我的方法遇到的主要缺點以及我將采取的不同做法的簡短列表:
激光二極管的外殼由黑色1/16“丙烯酸片激光切割而成。丙烯酸是脆性的很容易。當將殼體擰緊到位時,應變消除板經常會破裂。在任何潛在的未來迭代中,我會嘗試使用3D打印外殼或激光切割木材,然后可以噴涂以獲得顏色和耐磨性。
原型板很大且很笨重。我會嘗試制造一個定制的PCB來減小尺寸,降低成本和時間。
在一只手臂上,我將每條PWM線放入它自己的護套中,另一只手臂將兩根PWM線穿過一根護套。每個外殼護套加倍的PWM線使用的空間更小,右臂更容易移動并放入我的手臂。
Arduino有間歇性的崩潰,難以復制和調試。在未來,我會嘗試放入一個看門狗定時器,以確保它不會進入壞狀態,并將鐵氧體磁芯置于關鍵線路上,以試圖幫助減少其他組件引入的噪聲。
將電子設備外殼固定到夾克上是以隨意的方式完成的。在未來,我會嘗試提出一種解決方案,將每個外殼更牢固地固定在夾克上。
激光二極管導線在夾套襯里界面中有一定程度的松動。將它們釘在夾克上以確保它們更安全并且不會干擾手或手臂可能更好。
穿過夾克的螺絲不舒服并且不必要空間。要么為螺絲選擇合適的長度,要么將它們切割成合適的尺寸以及提供鈍端,以確保它們不會刺入佩戴者,這可能是值得的。
第27步:故障排除和常見錯誤
事情起火:
潛在原因可能是造成短暫的原因電線加熱并將其絕緣材料或周圍的易燃材料著火。
確保在電池上安裝保險絲,以便保險絲在短時間內吹氣,而不是電線或其他電子設備。
測試連續性以追蹤短線。確保所有焊點和區域都沒有電線修整。
事情無法啟動:
這可能是由于電源線短路或中斷造成的。另一個可能的來源是不良調節器或電池電量不足。最好還是確保電池充滿電并查看充滿電的電池是否能在進一步故障排除之前解決問題。
要追蹤錯誤的位置,請考慮以下步驟:
測試電池是否產生您期望的電壓(在這種情況下,2-3s電池輸出電壓應在7.4V至11.1V范圍內)。如果沒有,請給電池充電或使用另一個充滿電的電池。
測試以確保保險絲沒有燒斷。如果有,這可能表示電源線短路,因此如果電源線短路,則測試連續性以跟蹤。如果沒有,請更換保險絲,然后重試。
確保電源分線板的電壓符合預期。這意味著使用萬用表測試調節器之前電路板上的電壓是否預期會從電池中流出。測試每個穩壓器的輸出,以確保電壓是預期的5V。監管機構通常會死亡或者不好,因此可能需要更換。還要確保調節器的方向正確(應該有一個連接到電池側的“輸入”側和連接到電子設備其余部分的“輸出”側。)
測試連續性地面和電源軌。這意味著其他分線板上的電源和接地點上的每個點應該與源功率輸出分線板上的適當點連續。如果沒有,這可能意味著有問題的分線板連接不良或連接電源輸出的電線。
大多數焊接主要是電源管理并確保正確的電源和地面導軌到達他們需要去的地方。這意味著最常見的錯誤是電源線短路或中斷(至少這是我在經驗中發現的)。
如果斷電仍然造成混亂,請嘗試斷開所有連接,然后逐步連接組件,直到發生故障。例如,斷開電源分線板與其他電子設備的連接,并確保隔離的穩壓器正在通電。一旦確認工作正常,只添加Arduino Nano突破,然后添加單個PCA9685 PWM模塊突破等。
間歇性啟動的事情:
要排除明顯的情況,請確保電池已充滿電以排除空電池的可能性。如果間歇性故障在電量充足的情況下消失,這可能意味著電子設備“褐變”,并且可以通過補充電池輕松固定。
如果給電池充電不能解決問題,這可能是其中之一更令人沮喪的問題,很難追查和調試,因為問題往往難以重現。根據我的經驗,最可能的原因是焊接連接不良。原板的變形或連接器上的過大應變導致焊點變弱或破裂。在某些方向上,存在物理接觸,產生正常運行電路的錯覺,但是如果施加應力,則接頭脫離接觸并且部件停止工作或整體斷電。
如果這樣可以在‘替補席’上復制,然后這可以給出關節壞關節的線索。一般來說,最好通過焊接連接以確保它們看起來很好。這意味著確保接頭上有足夠的焊料,并且通孔中充滿了焊料。
我還發現輕微擺動以幫助追蹤弱連接。最后,需要安裝電子設備并且需要提供應變消除或幾乎肯定會發生這些類型的故障,但即使電路上的壓力最小,有時連接松動也會導致間歇性故障,應盡快跟蹤以后可以防止頭痛。
Arduino不斷重置:
根據我的經驗,這很可能是間歇性電源,因此應該使用上述尋找松散或不良連接的策略。在極少數情況下,電噪聲有時會導致外圍電子設備中的Arduino和其他問題。確保電源通過自己的穩壓器隔離是一個良好的開端,但在最壞的情況下,可以在選擇位置連接鐵氧體磁珠以嘗試減輕噪聲。
如果故障可以一致地再現,這可以很好地說明根本原因是什么。
另外,請確保電池充滿電以排除空電池的可能性。
麥克風/操縱桿不工作:
癥狀是操縱桿不會做任何事情(例如,無法改變‘模式’)和/或圖形均衡器模式不顯示任何內容。要檢查的第一件事是麥克風或操縱桿兩端都連接在一起。也就是說,檢查電纜是否連接到輸入設備,電纜的另一端連接到Arduino斷路器。如果它們已連接,請確保接線已正確完成,以確保電纜一端的電線與送入Arduino的電線相匹配。
如果明顯的故障排除技術不起作用,需要進一步調查。
對于操縱桿,將Arduino連接到您的計算機并打開調試。應該輸出操縱桿狀態,并確保它從操縱桿上讀取。
如果看起來Arduino仍然沒有看到操縱桿,請確保電纜和連接具有連續性。有時候操縱桿會失敗或開始不好,所以在最壞的情況下,單獨使用Arduino來嘗試從連接到操縱桿軸之一的模擬引腳讀取,以確定它是連接還是操縱桿失敗。
對于麥克風,請執行與上述類似的操作。檢查電纜的連續性,并確保測試連續性,以測試輸入引腳是否正在饋入正確的Arduino引腳,并且正在為麥克風模塊提供電源。 Arduino Nano的調試輸出也應該有麥克風輸出,這樣你就可以了解是否有東西正在被讀取。
圖形均衡器在軟件中有一個動態卷,以確保它試圖不敏感對于體積差異仍然會產生輸出,但它的功能有限。有時擺弄麥克風音量表會更好地創造一個更令人滿意的燈光秀。
麥克風失敗或有時不好,所以一個簡單的測試是嘗試更換,看看是否能解決問題。如果仍然無法正常工作,請使用連接起來的Arduino隔離測試麥克風。
某些激光二極管不起作用:
項目的規模是會發生失敗的。由于連接松動,連接斷開,電子設備損壞或其他問題,各個組件可能會發生故障。
對于激光二極管的情況,最好保留一些備用電源,這樣如果它們確實失敗了無論出于何種原因,它們都可以輕松更換。我發現更容易移除不工作的激光二極管并直接更換它們而不是修復損壞的激光二極管。
當追蹤單個激光二極管故障時,一定要測試激光二極管以確認它不是工作,或間歇工作。如果替換激光二極管仍無法正常工作,則可能導致電纜連接不良,因此測試電纜的連續性是一個很好的下一步。
如果電纜是問題,請更換它的一部分。
有時布線很緊,并且通過使用正常運動的應力導致連接斷開。由于激光二極管通過小型JST 1.25mm連接器連接,因此連接器應脫離而不是電線卡扣或外殼開裂。在這種情況下,可以通過將激光二極管重新連接到其電纜來重新建立連接。
如果激光二極管連接不斷斷開,最好選擇不同的連接,或者定位不同的電纜,將延長電纜焊接到其上或與相鄰的激光二極管交換連接,這樣正常的移動不會給連接帶來太大的壓力。
步驟28:結論
這個想法已經存在了十多年(截至撰寫本文時)。據我所知,藝術家Wei Chieh Shih是提出這個想法的原創藝術家。它已被其他名人使用,如Bono和Rihanna。我決定建立自己的,因為我認為這個想法很有意思,我沒有看過“DIY”版本,也沒有任何來源,原理圖或構建說明。
所有源代碼都是免費的/libre許可證(AGPL,GPL,MIT或CC0)。所有設計文件(如果適用)均可在免費/自由許可(CC-BY,CC-BY-SA或CC0)下獲得。這些說明本身可以在CC0許可下獲得。
在適當的情況下,請隨時修改,改進或使用此處所述的任何資產。沒有必要的信用。
-
激光
+關注
關注
19文章
3235瀏覽量
64655
發布評論請先 登錄
相關推薦
激光焊錫和激光焊接的原理區別

用DSP讀AMC1306E05數據有尖刺,這是怎么回事?
電子科普!什么是激光二極管(半導體激光器)
激光焊接工藝有哪些?
微流控光刻掩膜制作
LMC6484做的RC振蕩器,接上傳感器波形會出現尖刺怎么解決?
激光焊機激光減弱什么原因
激光切割機床身是什么結構好
激光切割機床的基本操作步驟
激光切割機參數設置中焦點位置是什么
stm32F1 ADC采樣有尖刺跟什么有關?
激光打標機紅光與激光不重合:原因及解決方案






 工商網監
工商網監
評論