") 怎樣制造一個藍牙控制的RC汽車
怎樣制造一個藍牙控制的RC汽車
第1步:所需材料

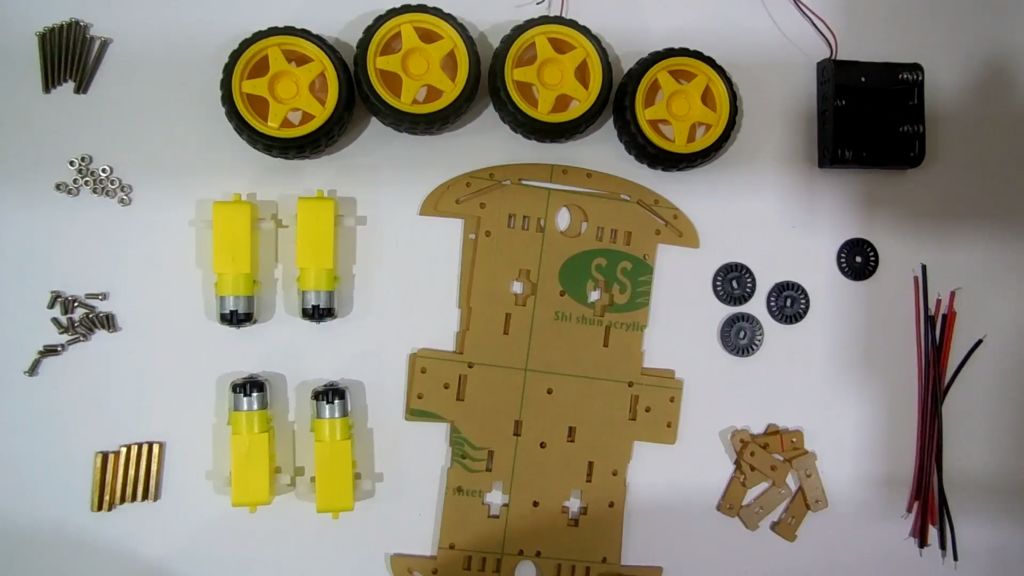
1。任何汽車底盤套件(帶BO電機,輪子和底座)
我買了這個套件 - http://amzn.in/cMSnMTL
2。 Arduino UNO
3。 L298電機驅(qū)動器
4。 Hc-05藍牙模塊
5。兩節(jié)電池(我使用三星18650可充電電池,3.7V和2600毫安)
6。跳線
7。電氣儀器(焊錫絲和鐵)
8。移動藍牙
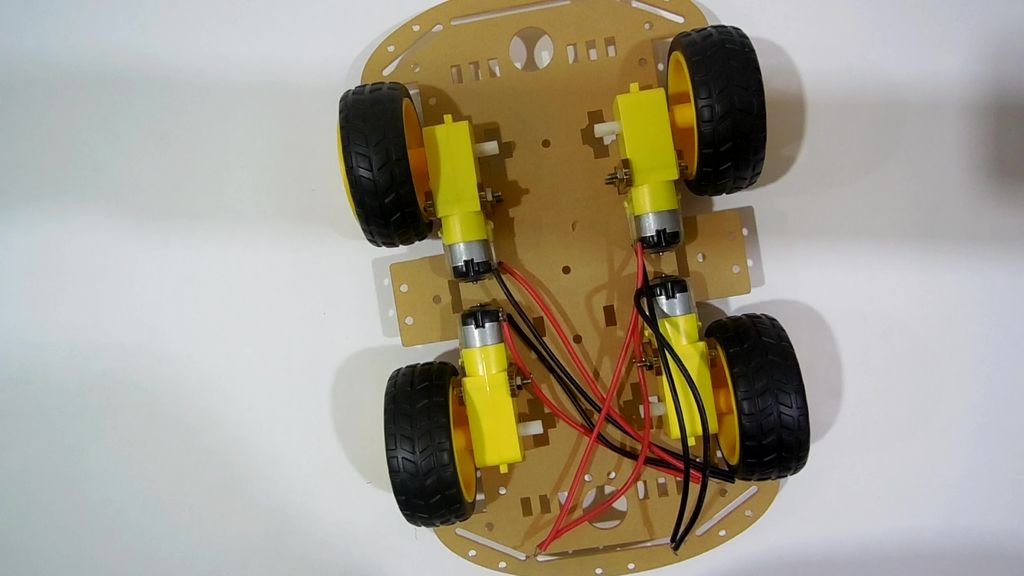
步驟2:焊接所有電機并將它們連接到基座

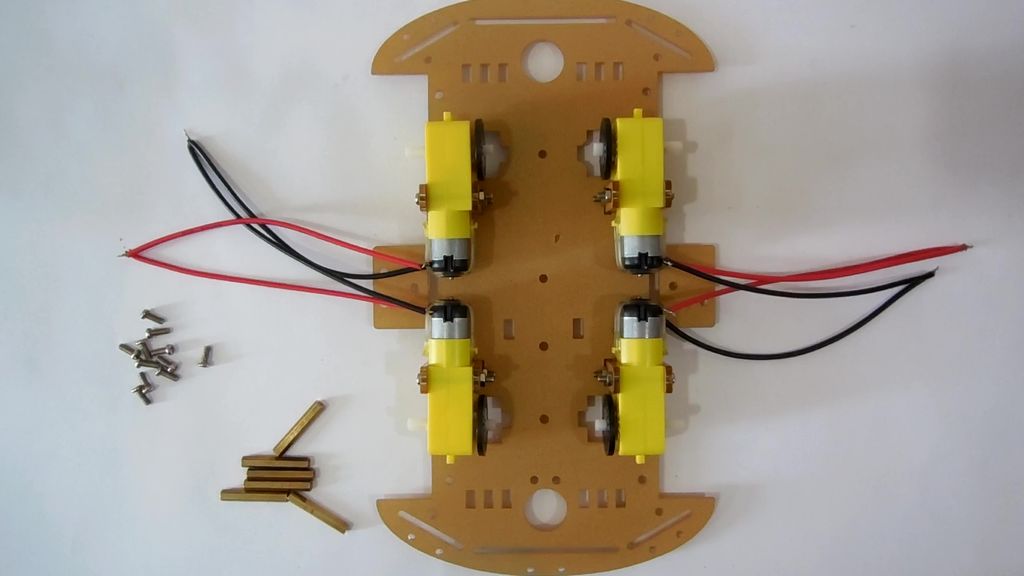
用黑色和紅色線焊接每個電機,并將其與機箱連接,如視頻所示。
將左側(cè)電機線連接在一起:紅線 - 》紅線和黑線 - 》黑線
同樣將右側(cè)的電機連接在一起:紅線 - 》紅線和黑線 - 》黑線
步驟3:將車輪連接到所有電機
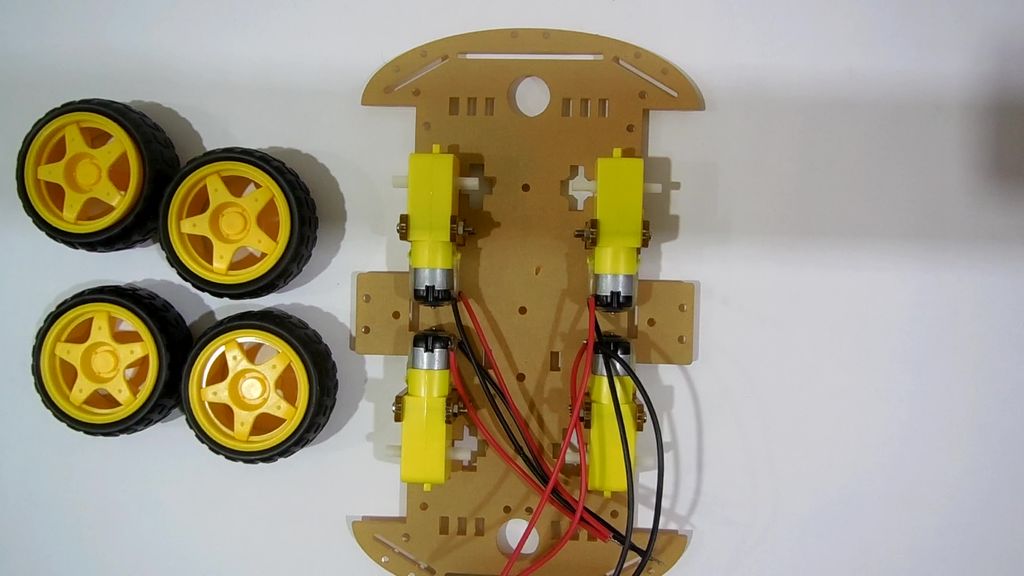
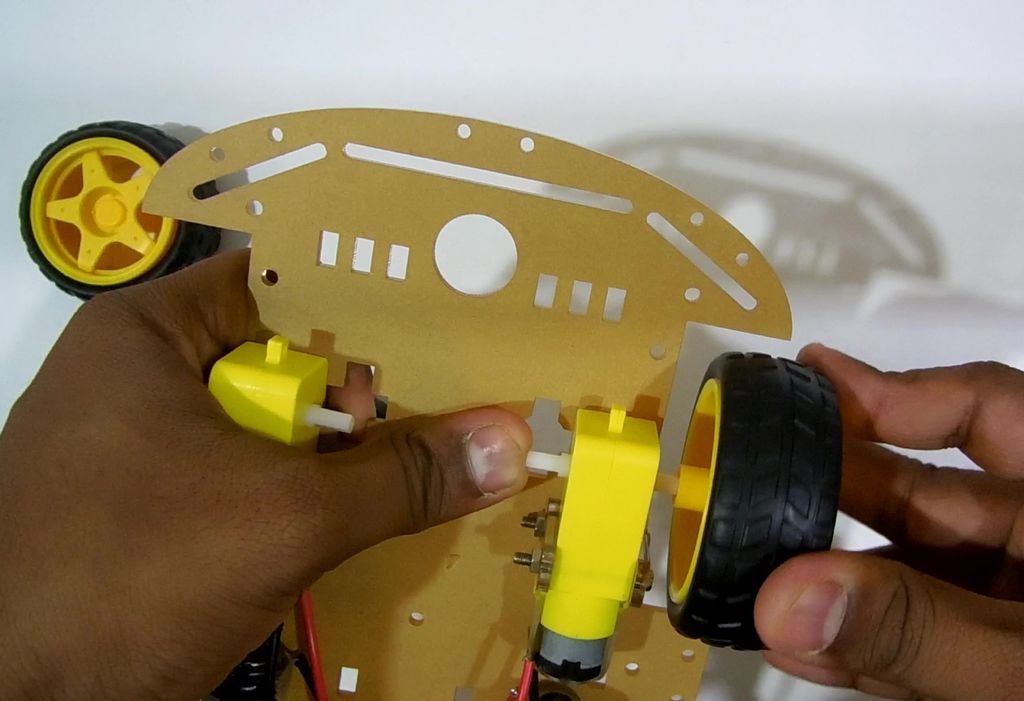
按下車輪時壓力不要太大,否則底盤可能會斷裂。
步驟4:加入兩節(jié)電池系列
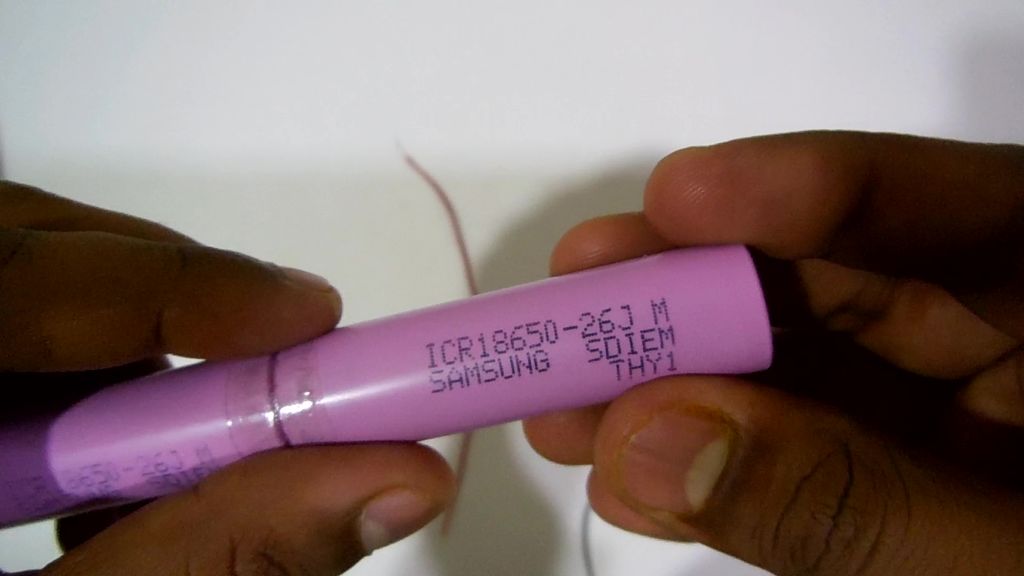
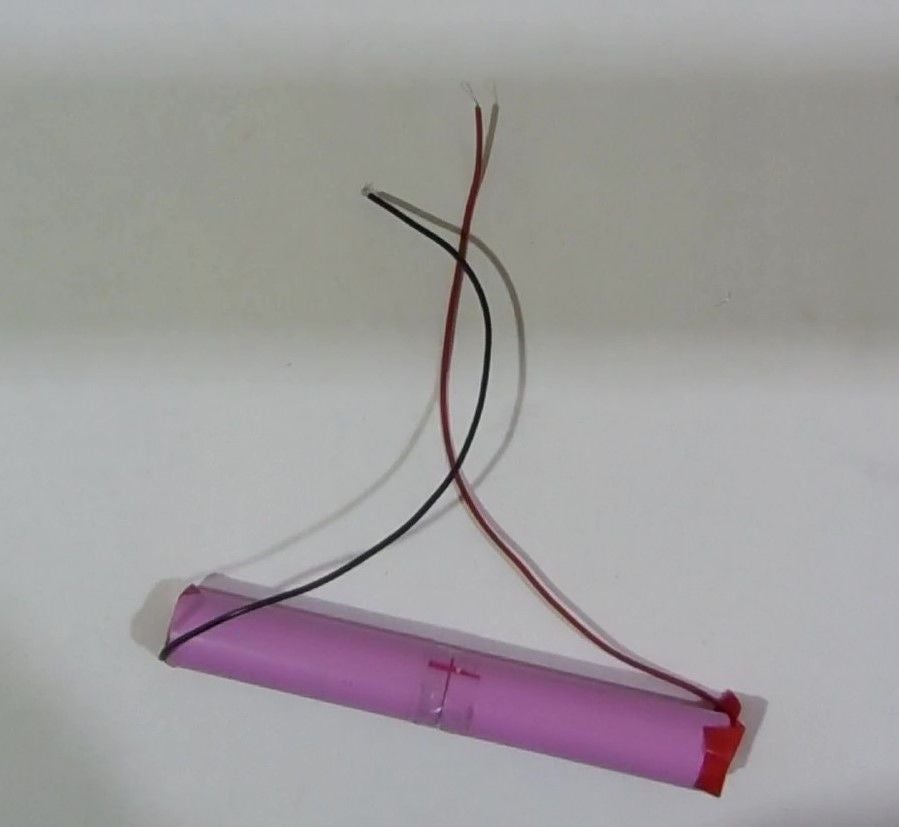
通過連接膠帶將電池串聯(lián)。你也可以在它們之間保持一小段開放的電線,以便它們連接良好。
現(xiàn)在將紅線連接到電池的正極端子,將黑線連接到負極端子。
嘗試保持電壓《= 9伏。我使用了兩節(jié)3.7伏電池,所以我的總電壓為7.4伏。如果您使用高壓(例如》 = 12伏,您的組件可能會被加熱并可能會燃燒)
如果您的電池具有更高的額定電流 - 您的電機將快速旋轉(zhuǎn)。我的電池額定電流為2260 mA,足以為4個電機供電。
注意:請勿將電池的正極端子直接連接到負極端子上。它可能會在沒有任何阻力的情況下燒毀您的電線。
步驟5:將電機連接到電機驅(qū)動器
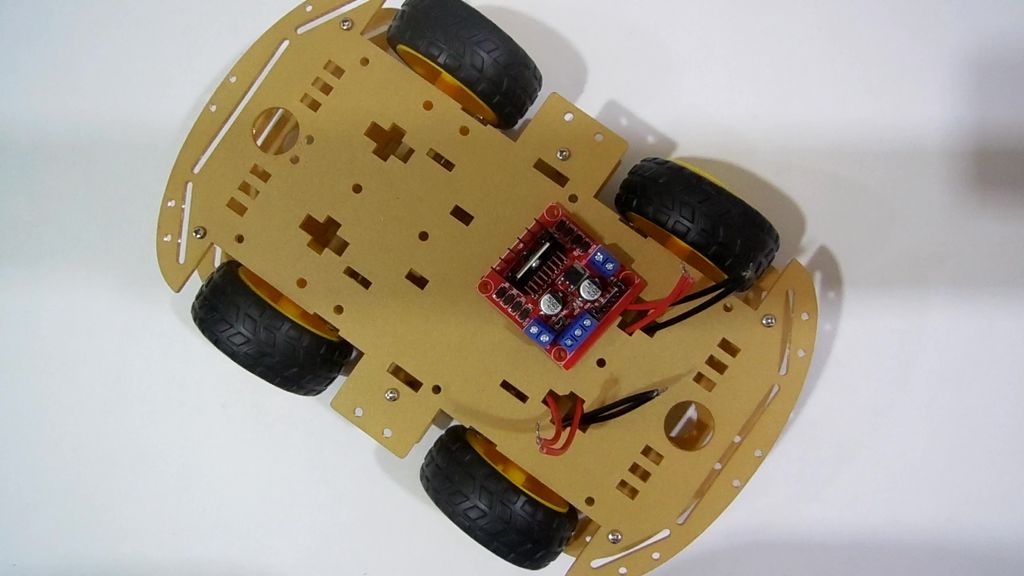
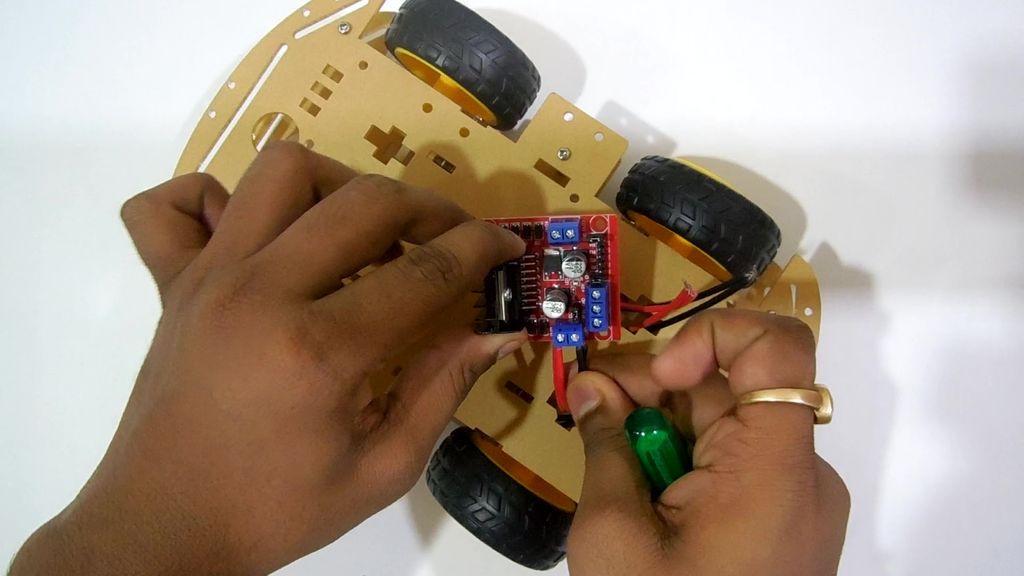
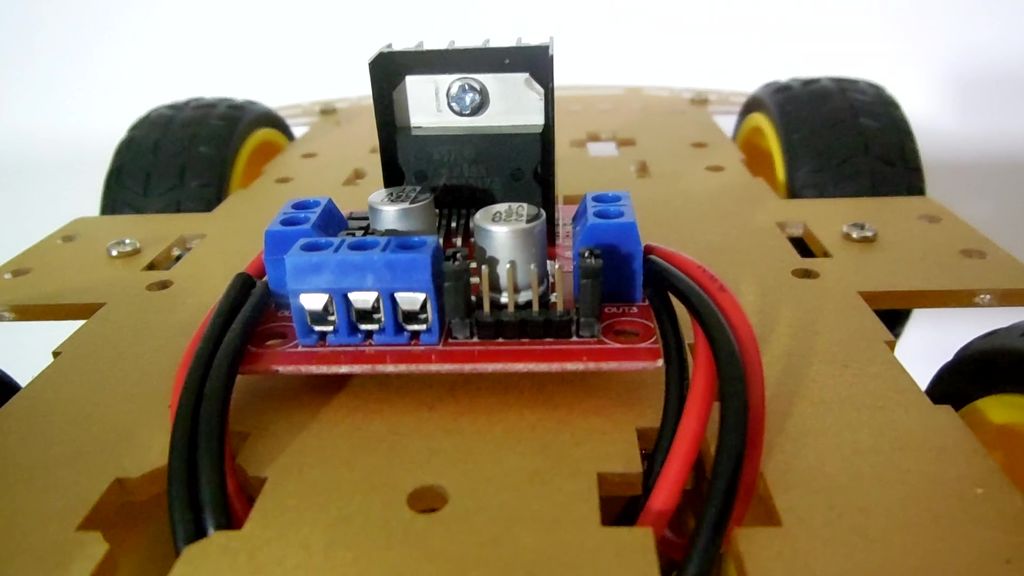
加入紅色和每側(cè)電機的黑色端子,電機驅(qū)動輸出。
步驟6:將電機驅(qū)動器連接到Arduino
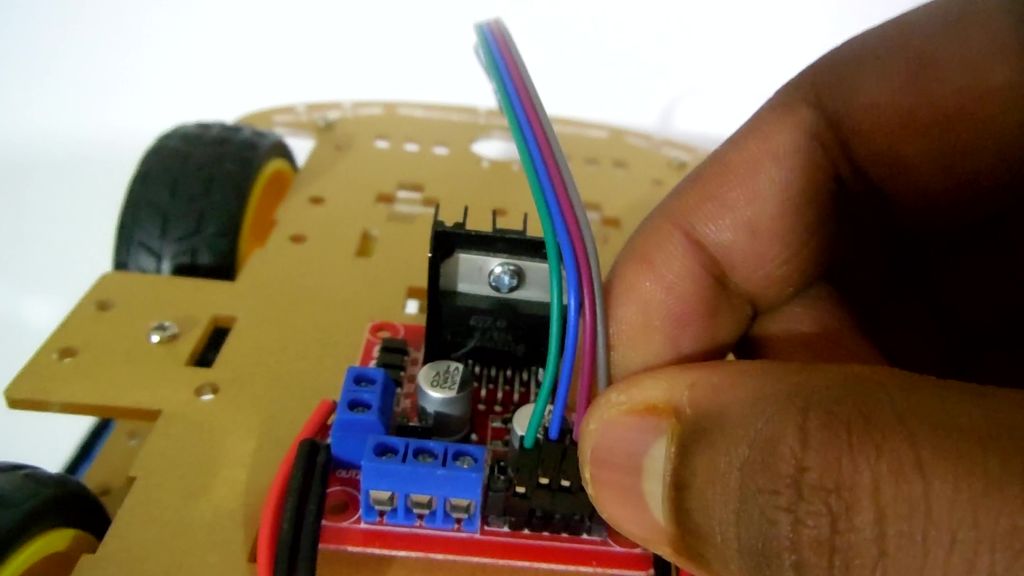
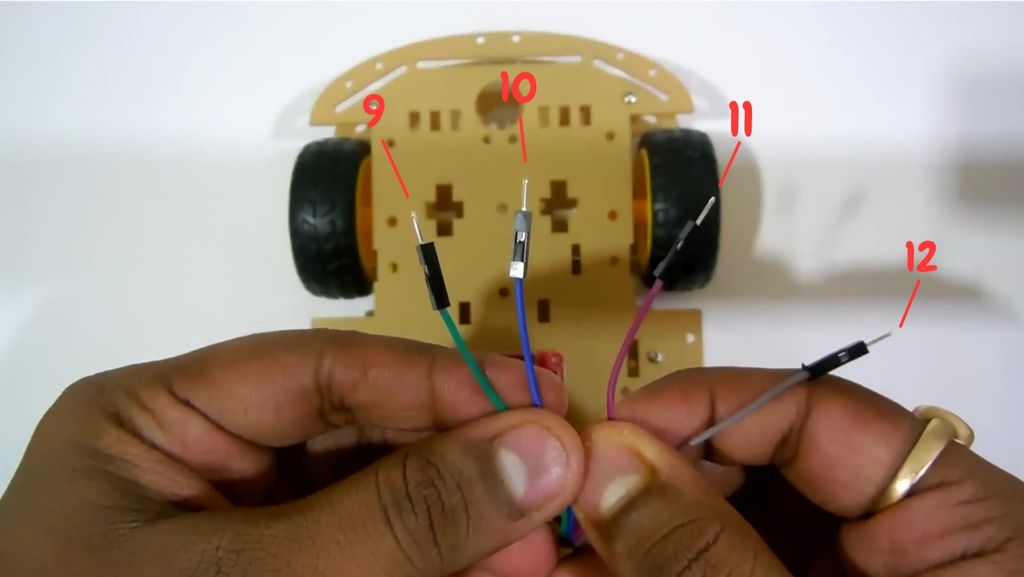
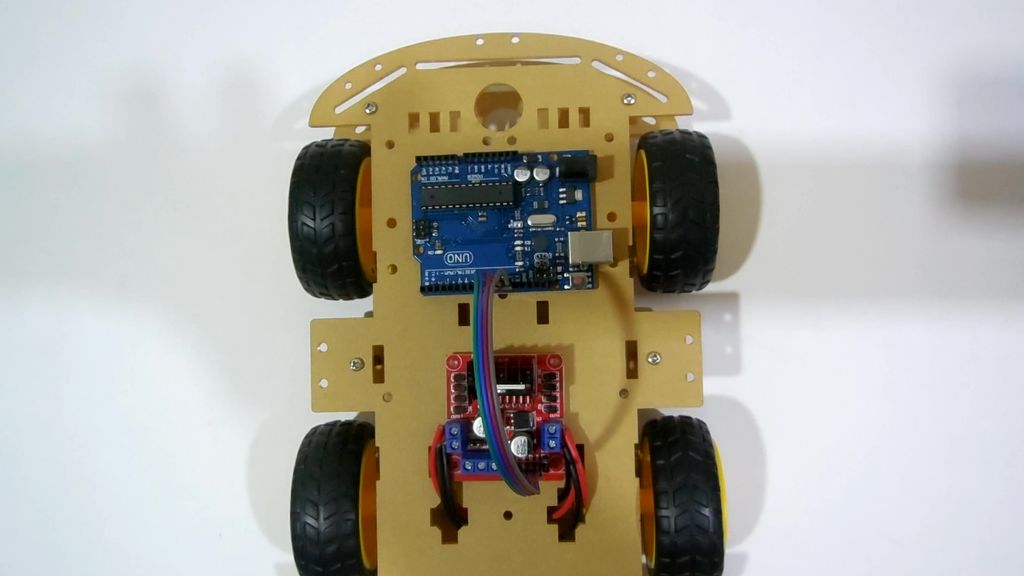
然后將電機驅(qū)動的四個控制引腳連接到arduino 9號,10號,11號和12號插座。
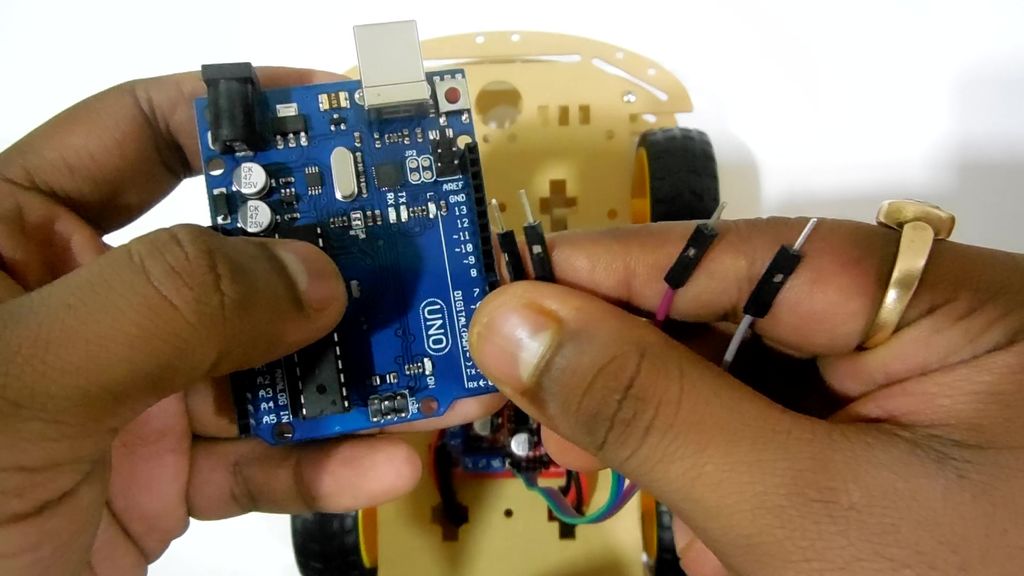
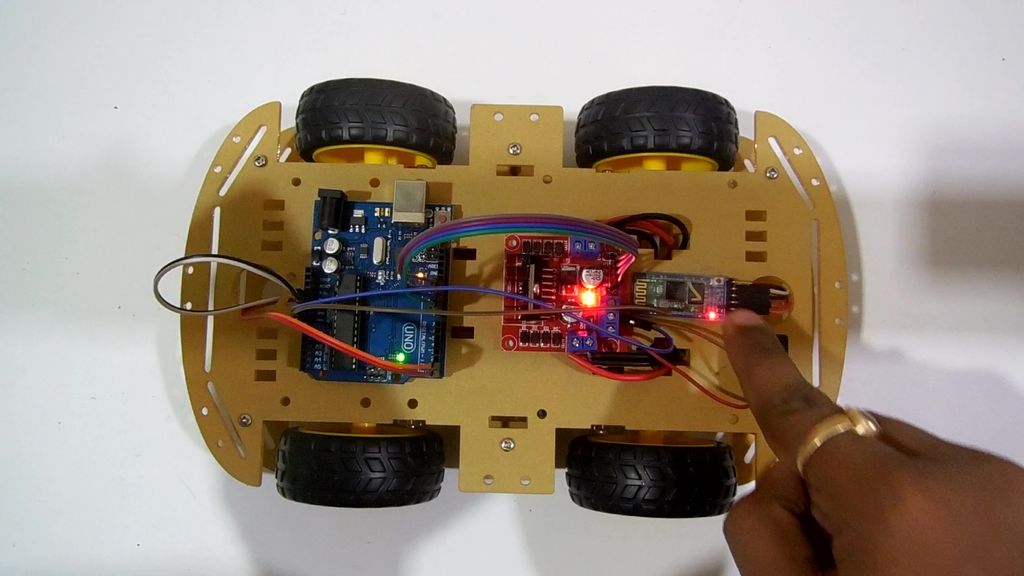
步驟7:將藍牙模塊連接到Arduino
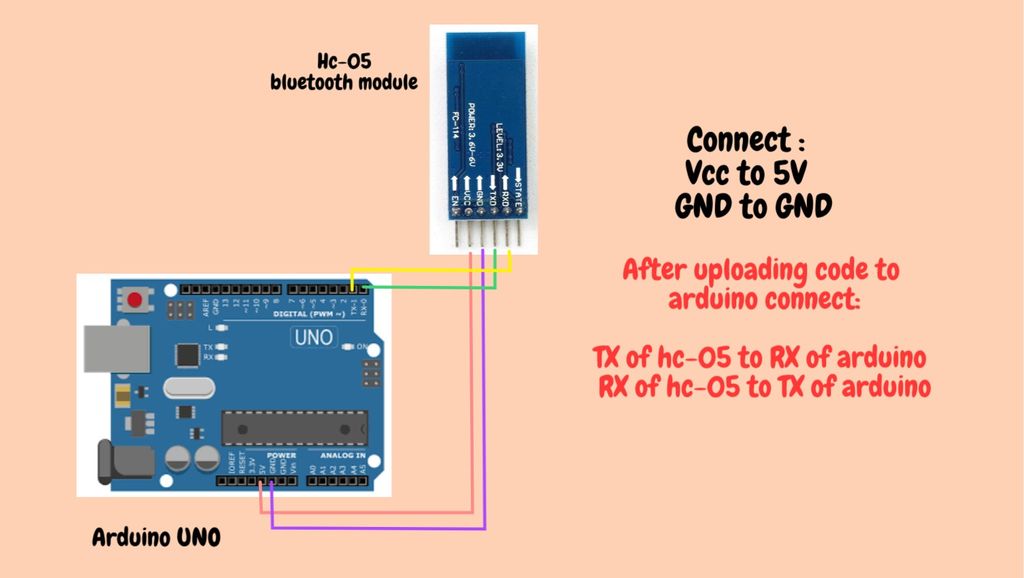
將藍牙模塊(BT)HC-05連接到arduino,如電路圖所示。
將BT模塊連接到arduino as: VCC - 》 5V 和 GND - 》 GND
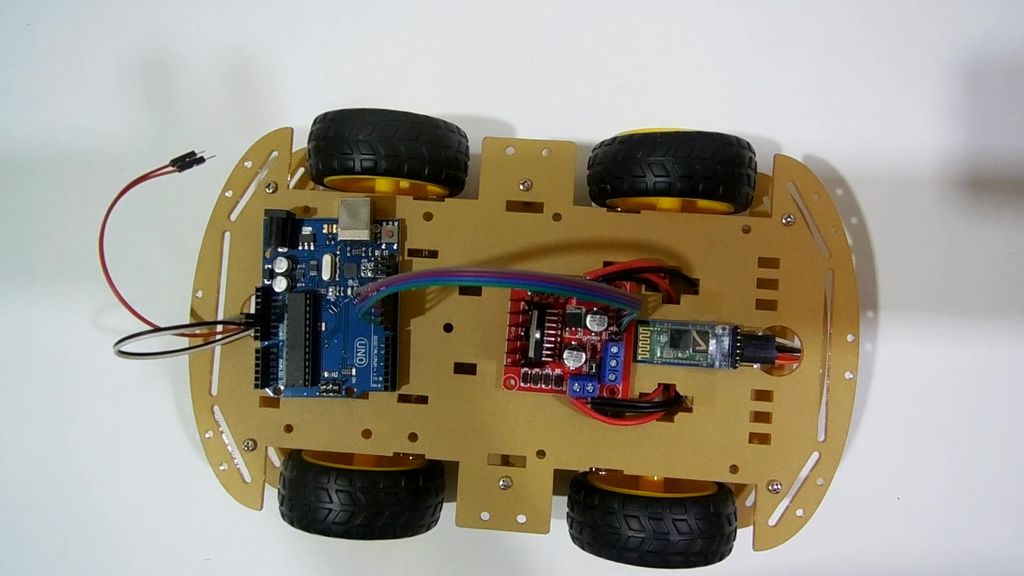
步驟8:將電機驅(qū)動器連接到電池
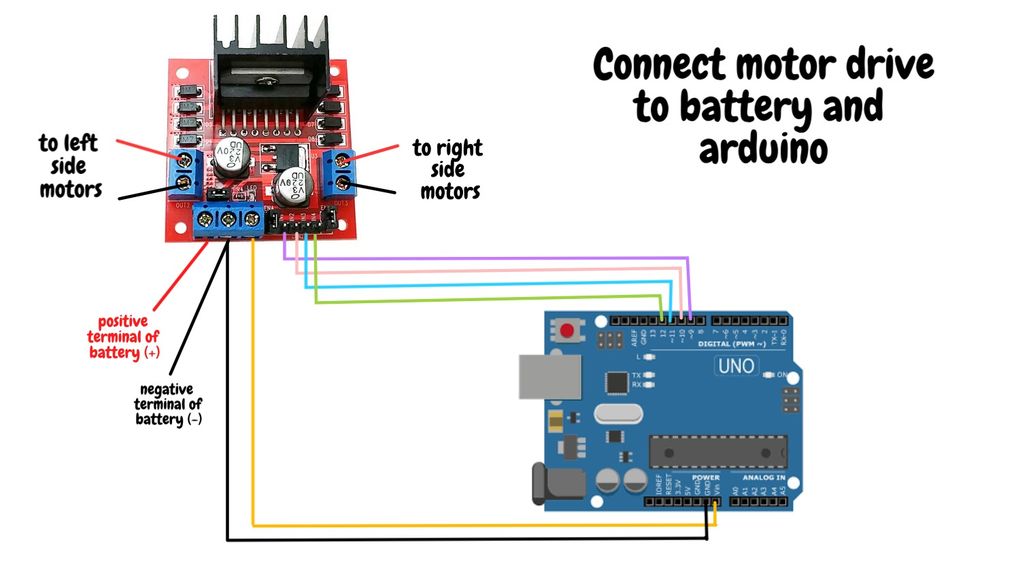
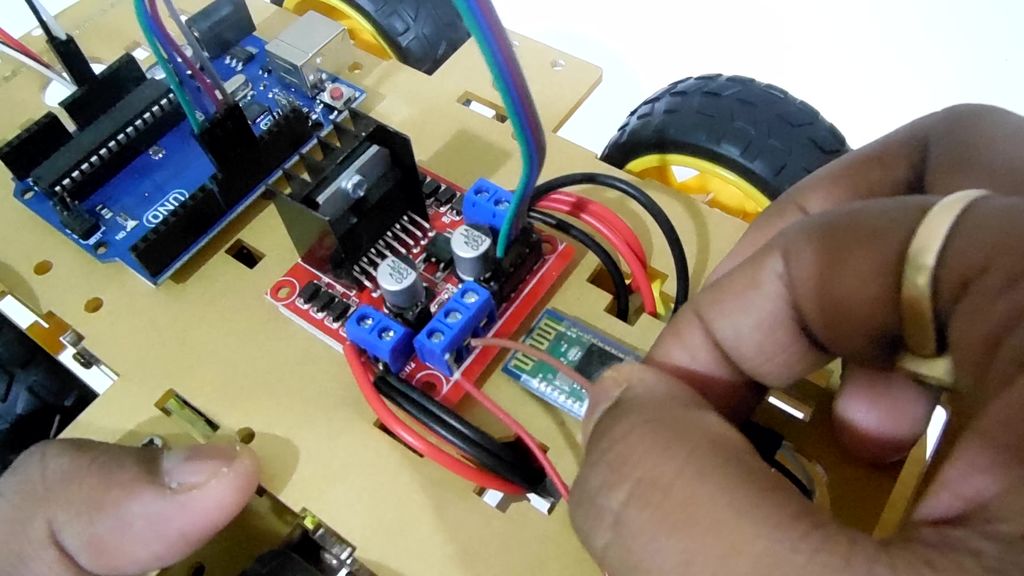
將電機驅(qū)動器的電源輸入插座連接到電池的正極和負極端子。還將電池的負極連接到arduino的GND。最后將第3個終端連接到arduino的Vin。
您也可以根據(jù)需要添加一個開關(guān)來啟動或停止汽車。
步驟9:上傳代碼&下載應(yīng)用程序
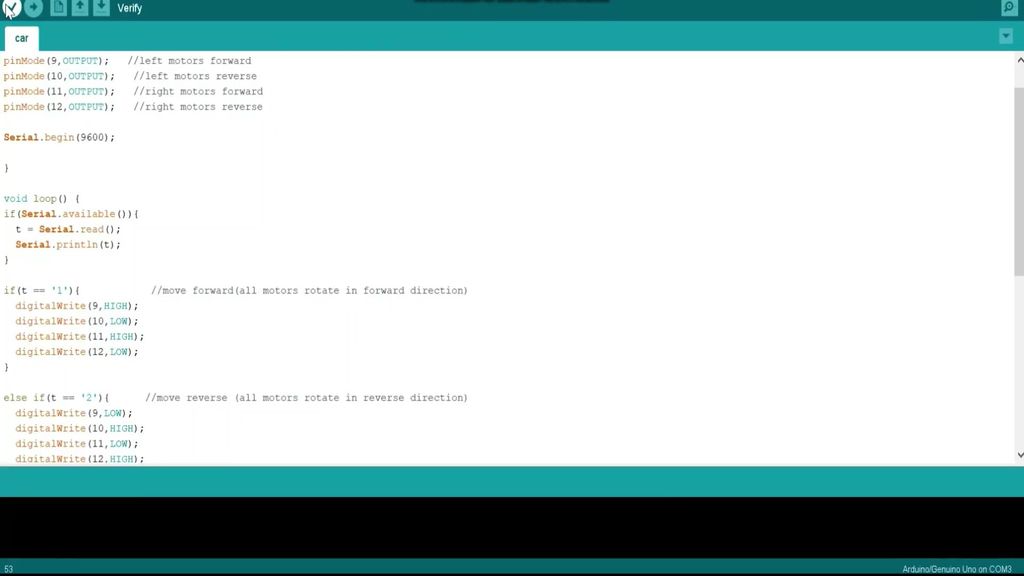
您可以從此處復(fù)制代碼。
現(xiàn)在編譯并將給定代碼上傳到arduino。
第10步:
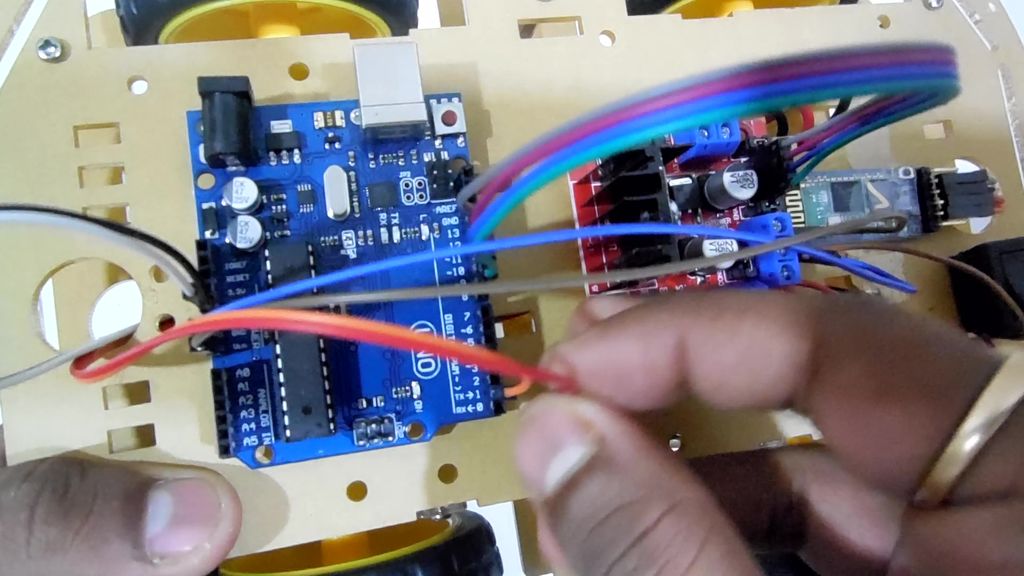
上傳后,斷開arduino與PC的連接。
現(xiàn)在將Hc-05的Rx連接到arduino的Tx和Hc-05的Tx連接到arduino的Rx。
(在上傳代碼之前不要連接這些代碼,否則在上傳代碼時可能會燒掉你的arduino)
最后,下載Arduino藍牙控制應(yīng)用程序。
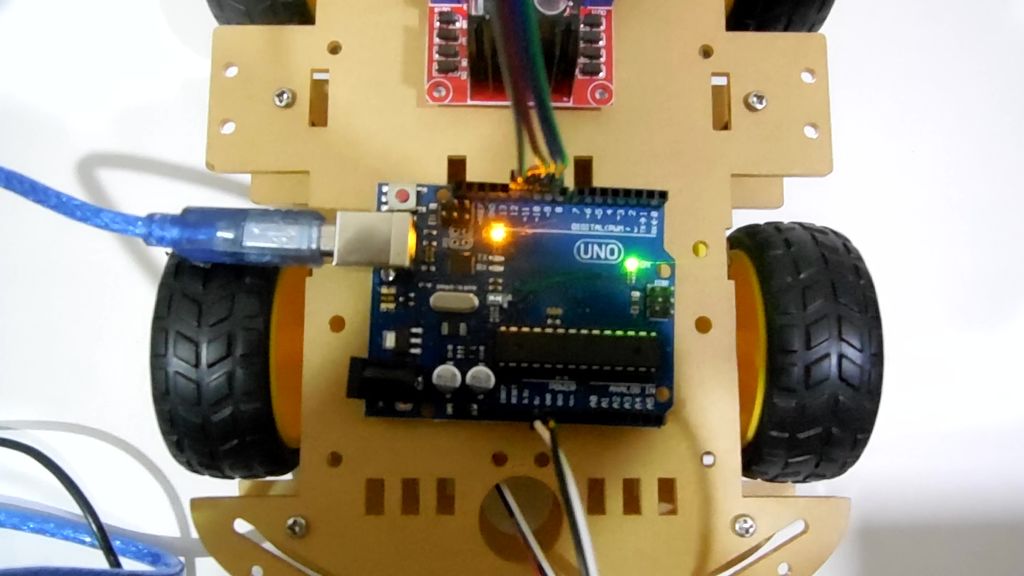
步驟11:與藍牙模塊配對
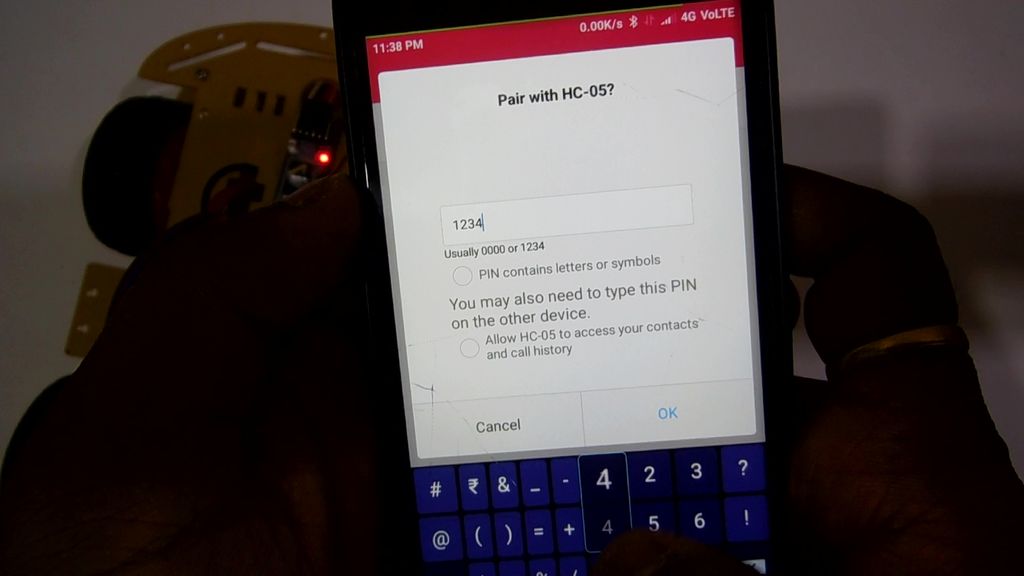

啟動汽車。檢查藍牙模塊的LED是否快速閃爍而不進行配對。
將HC-05藍牙模塊與智能手機配對。輸入密碼1234 。 (如果不起作用,請嘗試0000)
配對后打開應(yīng)用程序并選擇HC-05進行配對。檢查藍牙模塊的LED,其閃爍速率現(xiàn)在非常慢。
步驟12:測試驅(qū)動器

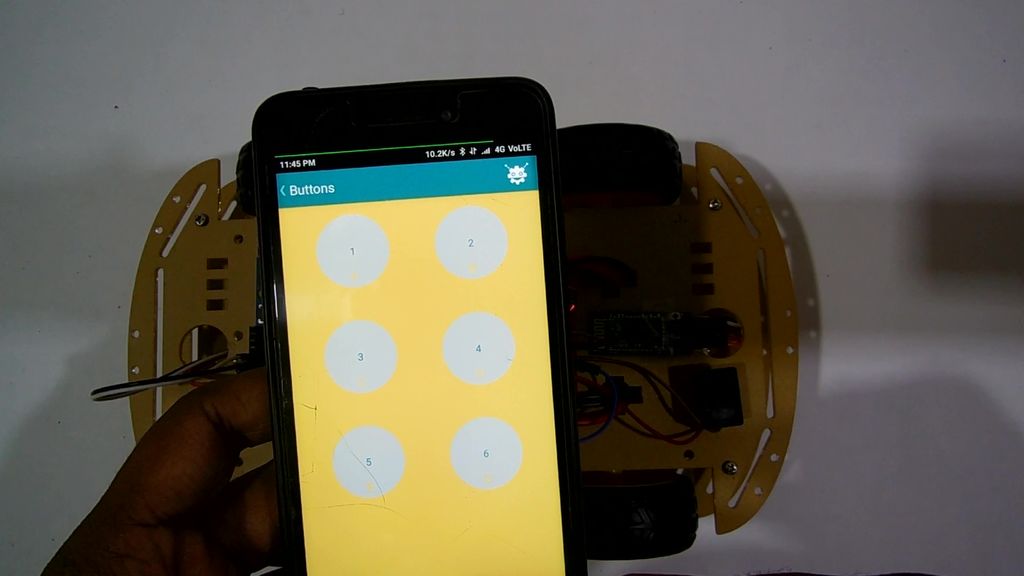
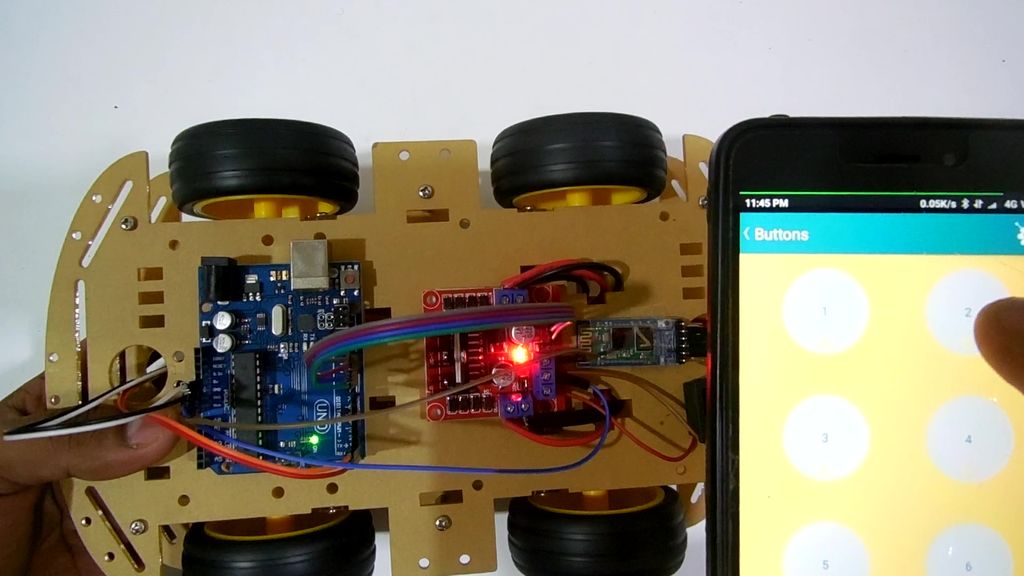
轉(zhuǎn)到應(yīng)用程序 - 》按鈕
按1:汽車向前移動。 (所有車輪開始向前移動)
按1:車輛反向移動。 (所有車輪開始向后移動)
按3:車輛轉(zhuǎn)向左側(cè)。 (只有右輪移動)
按4:汽車轉(zhuǎn)向右側(cè)。 (僅左輪移動)
步驟13:建議

使所有連接正確且緊密。如果它們松動,那么你的車可以在移動時停下來。
你甚至可以建立一個避開機器人的障礙作為下一個項目。
-
藍牙
+關(guān)注
關(guān)注
114文章
5844瀏覽量
170787 -
遙控車
+關(guān)注
關(guān)注
9文章
81瀏覽量
23780
發(fā)布評論請先 登錄
相關(guān)推薦
智能制造在汽車行業(yè)的應(yīng)用
開關(guān)電源驅(qū)動芯片Isense腳的RC怎么調(diào)整
rc濾波電路對電壓波形的影響
rc電路的串聯(lián)和并聯(lián)電路的區(qū)別
方波通過RC成為了什么波形
時間常數(shù)RC在電子電路中的應(yīng)用
藍牙模塊喚醒原理是怎樣的?
藍牙Mesh模塊組網(wǎng)時是一個信號還是兩個信號?

藍牙的名字由來是怎樣的?藍牙的工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論