 電動滑板的制作教程
電動滑板的制作教程
第1步:材料和工具
這個項目需要焊接技能,成本約為€ 500。
材料:
供應商的所有材料和鏈接都在物料清單表中。
工具:
烙鐵+錫
鉗子
熱膠槍
螺絲刀和艾倫鍵套件
pincet有時會派上用場
剪線鉗/剝線器
本項目使用車床,激光切割機和3D打印機!
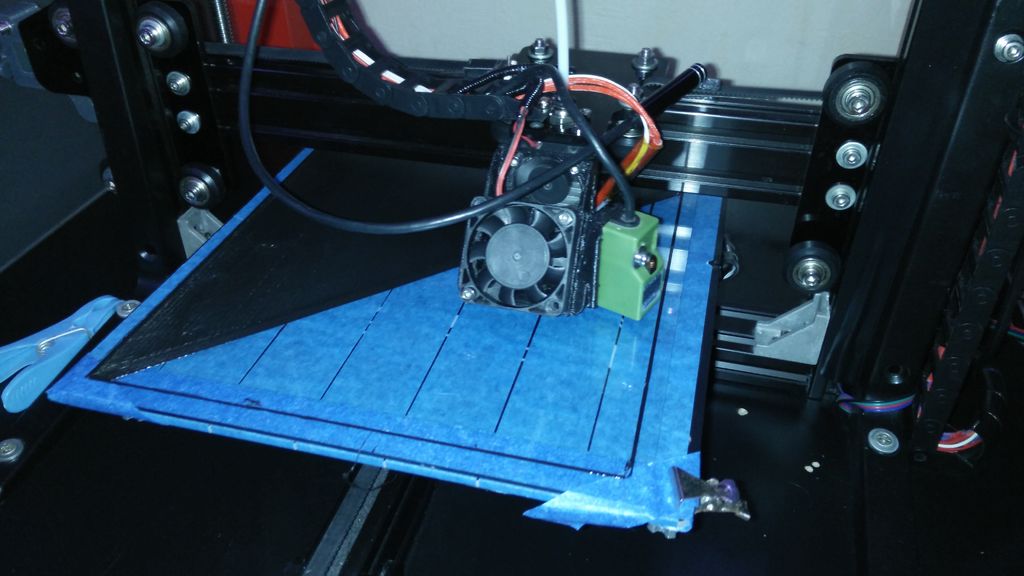
步驟2:更換車輪和準備卡車
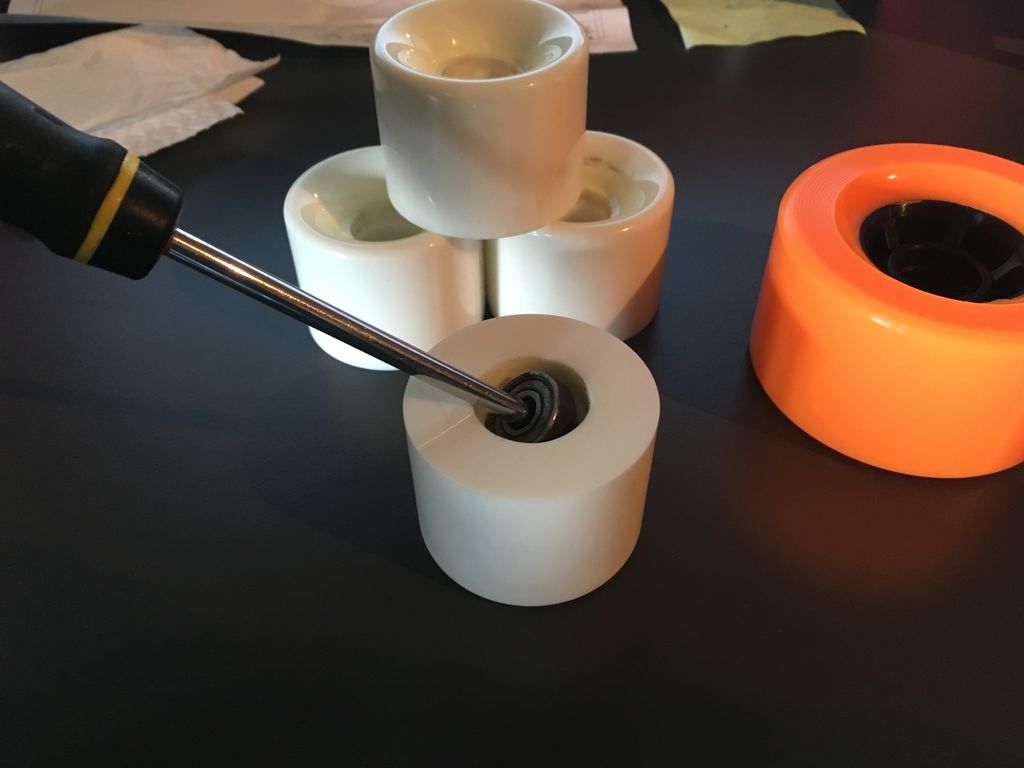



首先,我從長板上取下那些小白色輪子。然后我拆下滾珠軸承并將它們放入橙色90毫米輪子中。
安裝電機的卡車需要進行小幅調整。帶齒輪的車輪不適合我買的長板卡車,因此我不得不用車床切割約1厘米。
然后將它們安裝在卡車上,除了車輪外齒輪(我隨機選擇右側,背面)。
步驟3:切割和焊接電機座





我使用激光切割機制作了鋁制電機支架,尺寸如上圖所示。
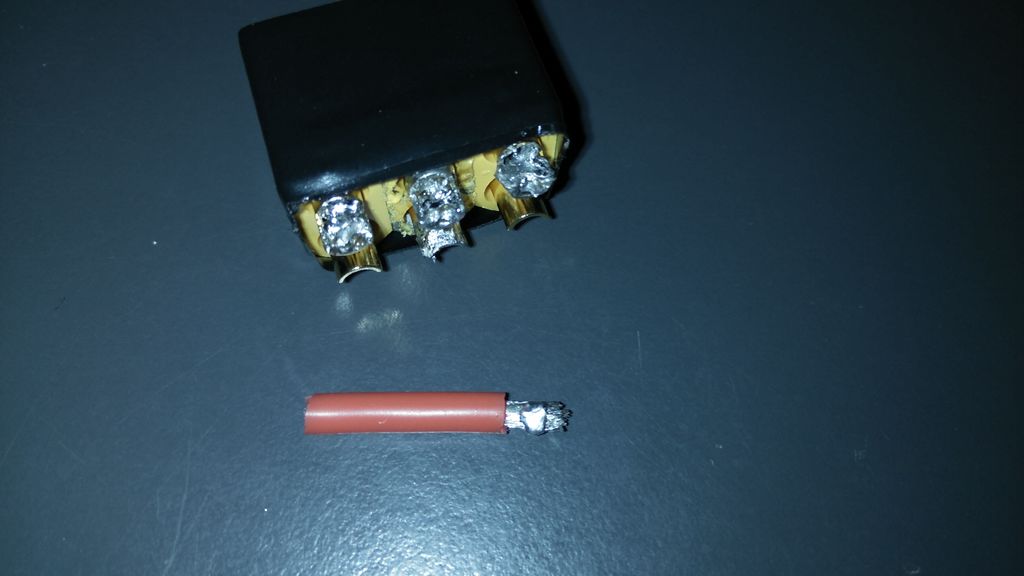
定位山的重要性。它需要盡可能地向下傾斜而不接觸電路板,因為我有一個大電機,角度不是那么大。我碰巧認識一個焊工,所以起初他把它焊接了一下,然后測試定位,我把卡車從一邊推到另一邊,看看它是否碰到了電路板。
我的整個電路板都是完成后,我做了一次測試,電機安裝座斷開,這就解釋了為什么我的電機在即將拍攝的照片中看起來會受損;)之后我讓我的熟人完全焊接它。
步驟4:安裝電機和皮帶





使用4個M4 * 14粗體將電機安裝到底座上。
之后,您必須將12齒電機皮帶輪固定在電機軸上。確保軸上的扁平部分有細長的粗體!
現在你可以帶上一條皮帶并將它放在滑輪上,帶齒輪轉動輪子并將其轉動,直到整個皮帶繞在齒輪上。
將螺母擰緊到叉車上,這樣你的車輪就不會脫落,就是這樣。
步驟5:接線圖

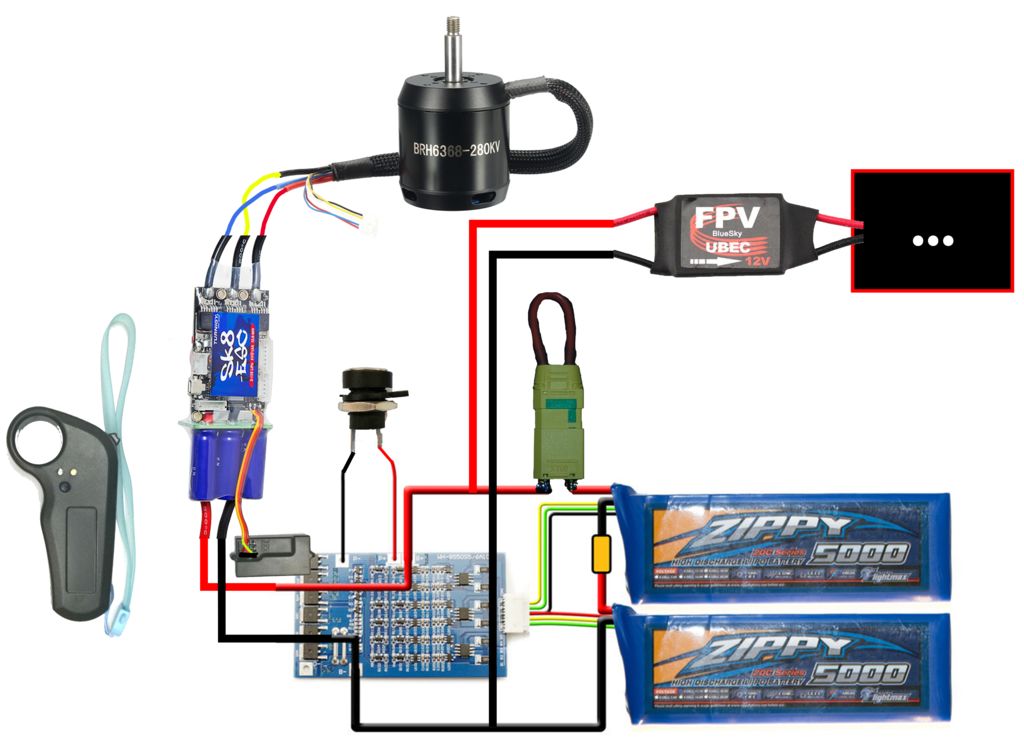


根據上圖連接電子元件。
第一個是te電子的完整原理圖。
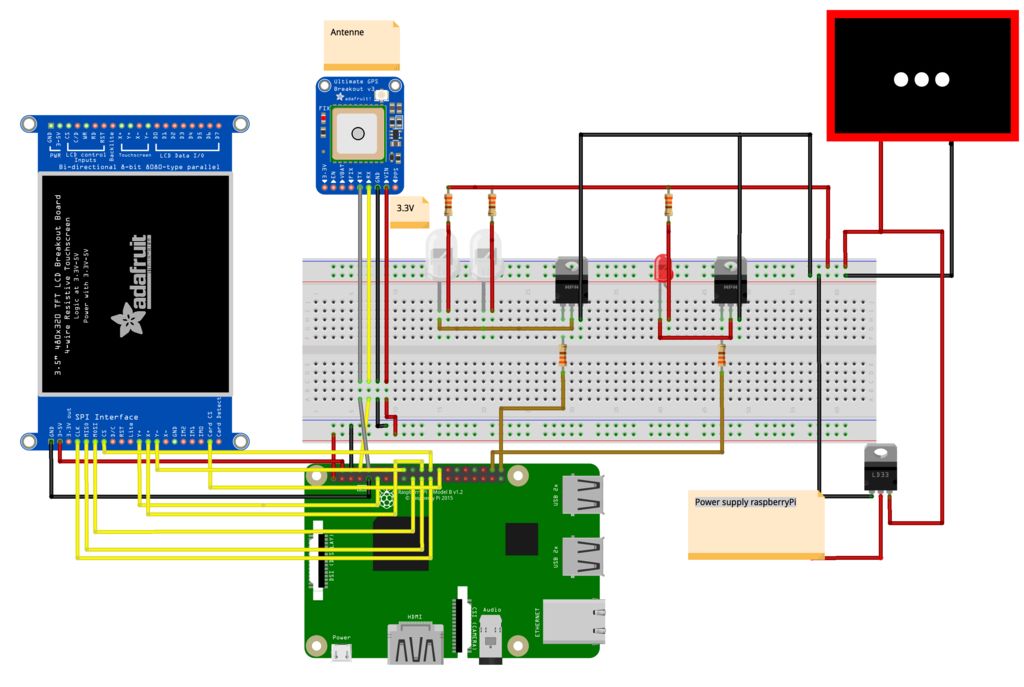
第二張圖顯示了電動長板部分的所有連接,6s UBEC到12V則進入下圖。該圖顯示了由覆盆子Pi控制的燈和傳感器的電路。
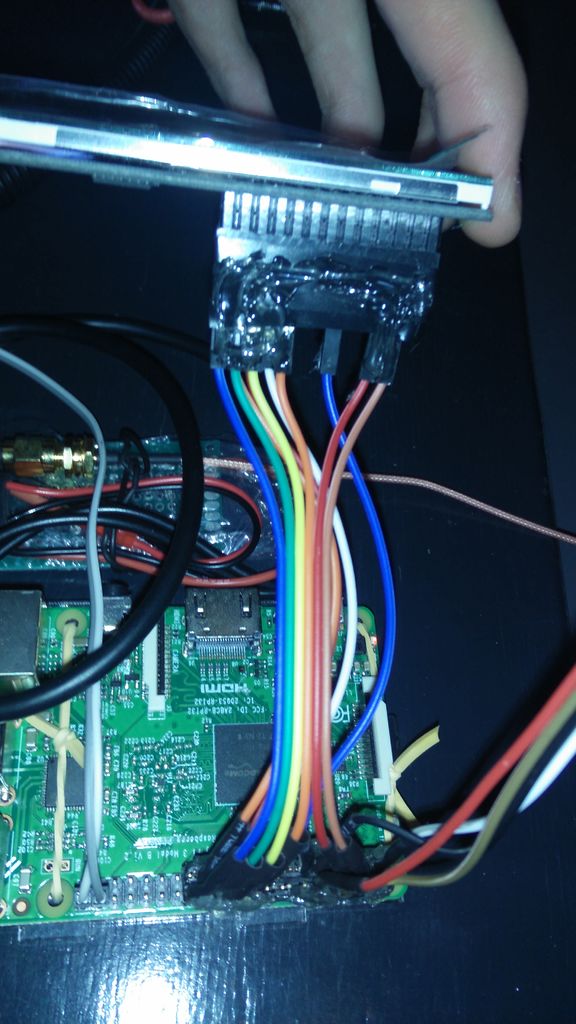
正如您可能已經看到的那樣,tft屏幕有一個帶有許多針腳的母頭。我們需要與GPS模塊進行串行通信的引腳。所以我把我們需要的引線(圖4-6)上的電線焊接到插入Pi的母頭。
步驟6:連接BMS









我使用comsa42作為連接圖的可用構件。
我使用BMS(電池管理系統)平衡板給我的脂肪充電,這樣我就可以將它們留給我了通過防水直流插孔為“智能充電器”充電并給它們充電
我焊接了BMS充電端口的兩根電纜,一根在P-(黑色)上,另一根在P +上(紅色)。(這些電纜不需要太厚,因為通過充電端口只需要2安培)
注意:一開始我使用的是DC插孔用螺絲釘,但我后來用BOM中的防水DC插孔替換它。不要焊接插頭,或者一旦你想把它放在你的外殼中你就會遇到問題。
我將兩個電池與一個‘XT60 2包串聯插頭’連接起來買的。我將那個公頭插入一個母頭,然后我用一條粗紅色和黑色的線焊接到它。紅線進入B +和BMS,黑線進入B-。
然后是電池的平衡電纜。我使用了兩條購買的平衡電纜,并將紅色平衡線拔出,用于電池一,最后一根黑線用于兩側電池2。我們不需要那些,因為它們與我們已經連接的厚電池線相同。然后按照正確的順序焊接它,如圖所示。
注意:在中間我用下一個電池的正極接地,但這不是必需的,因為系列連接器已經這樣做了。
步驟7:開/關開關(循環鍵)

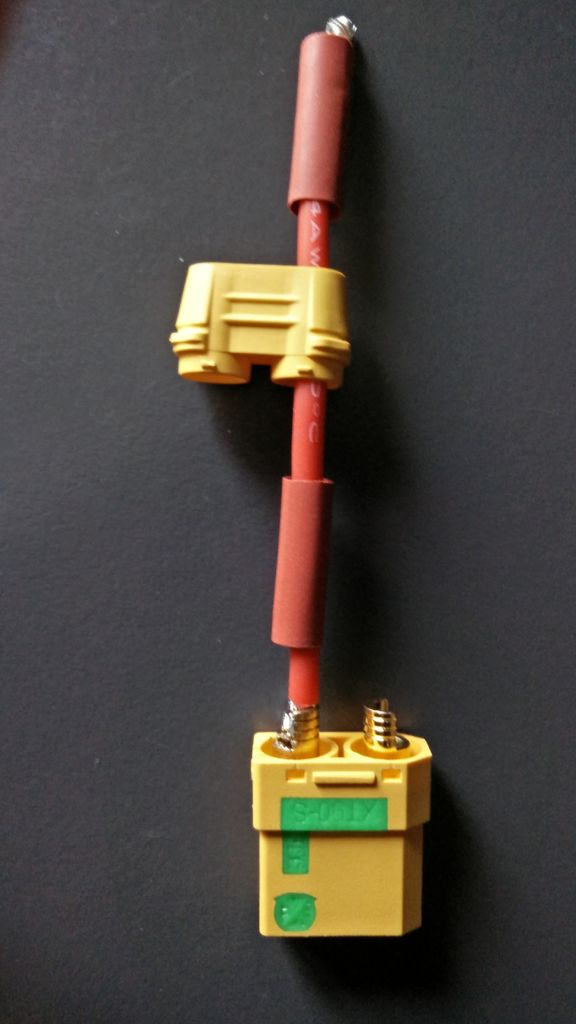




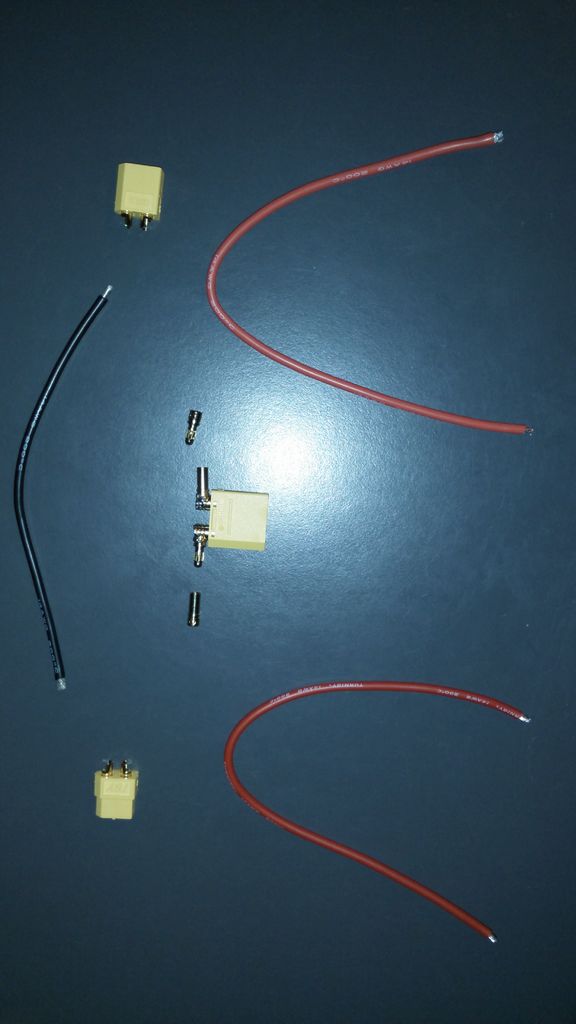
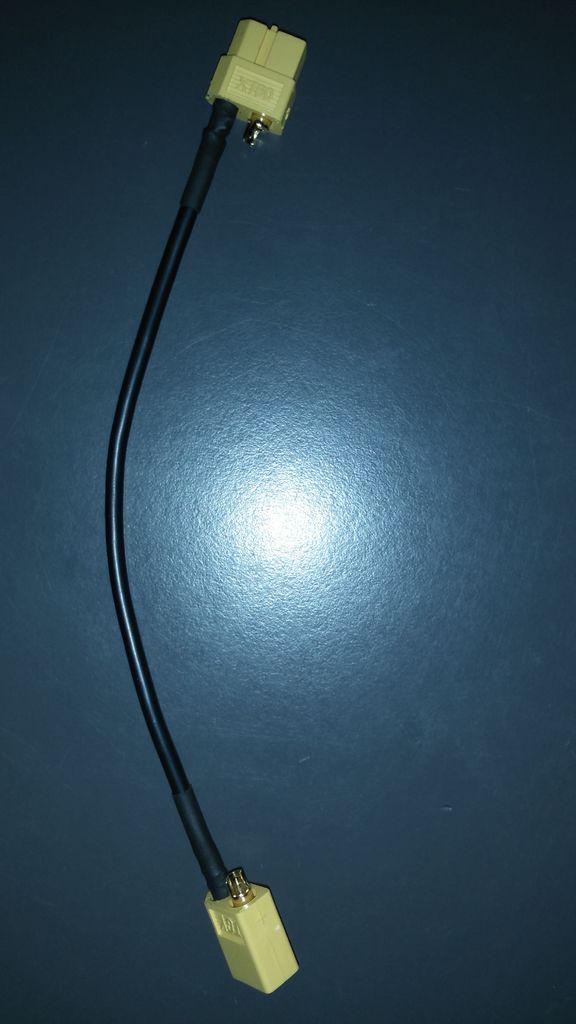




我沒有購買60美元的反火花開關,而是制作了一個循環鍵。原理很簡單。你在電路中斷并打開電路板,插上XT90防火花連接器,電路關閉,沒有任何火花。
首先我把電線焊到公插頭上(圖片) 2-4)然后將一些3.5mm子彈連接器連接到母XT90插頭。
為了將它連接到電池,我使用公XT60連接器連接到母XT60連接器,但紅線中斷。然后我將子彈連接器焊接到我將電線切成兩半的末端,這樣我就可以插入母XT90接頭而不是將其直接焊接到電纜上。所以插上電源,開/關開關就完成了。
步驟8:VESC,電池指示燈和UBEC Connecor













我將自己的‘3并聯到1個連接器通過將3個XT60接頭連接在一起(圖1)并將電線焊接到樹形正極和電線連接到樹形負極(圖2-6)。接下來,我將一個公連接器焊接到它上面并用一些黑色膠帶保護裸電纜。 (圖7-9)
VESC和指示燈
將公XT60插頭焊接到VESC電源線和電池百分比/電壓電纜上指示燈。
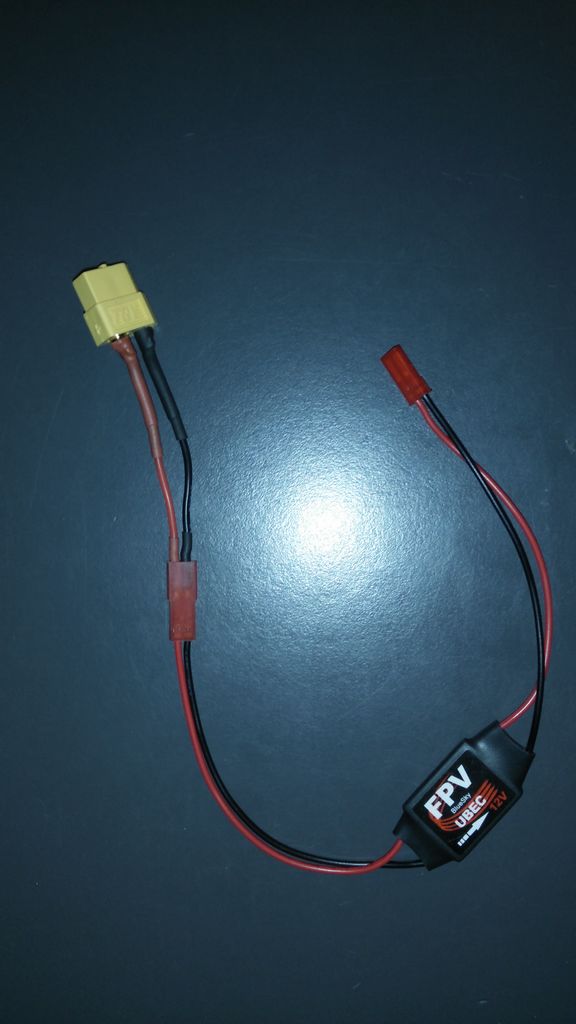
uBEC
將公端的 2平衡電纜和焊錫拔出至公XT60插頭。母端連接到uBEC(電壓轉換器)的輸入側。
注意:我把平衡線切成了一點’,但這是一個錯誤所以保持完整;)
步驟9:電機傳感器到Vesc




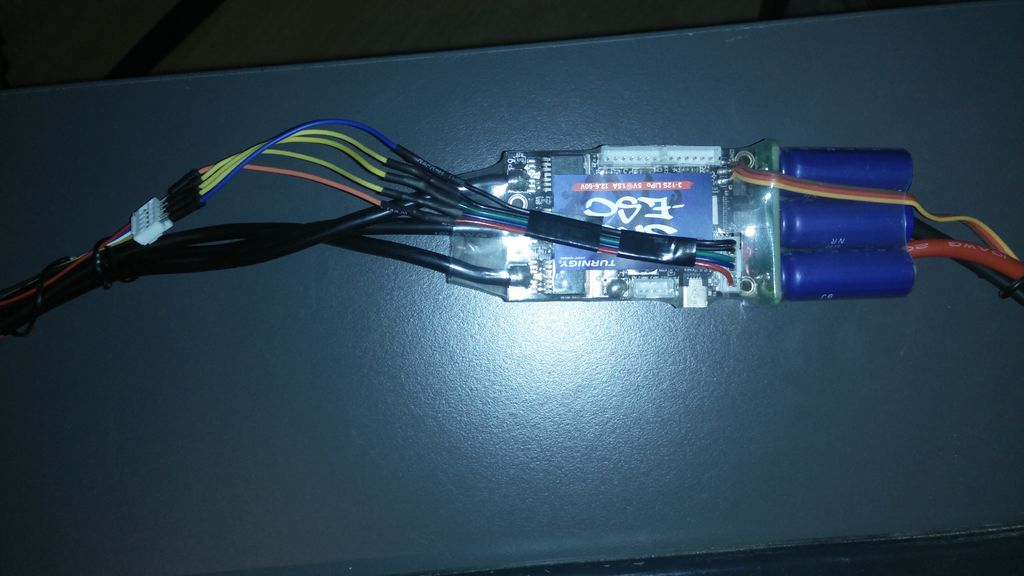
使用兩根步進電纜將電機傳感器連接到VESC。電機有5個引腳,2個用于霍爾傳感器的電源(每個霍爾傳感器1個引腳)。
從4pin側拉出4根電纜,從第2根步進電纜中取出額外的電線,將它們剪短一點并將一些公針固定到末端。按照圖片中的正確順序放置它們
使用熱縮管和膠帶使一切安全!完成后,剩下要做的就是從VESC到電機正確的順序。
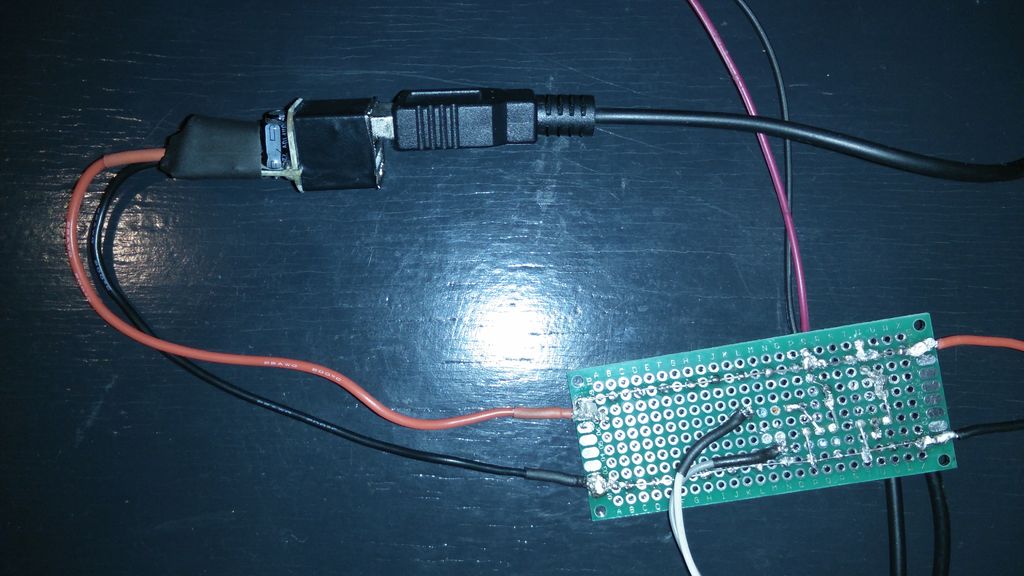
步驟10:電源Raspberry Pi










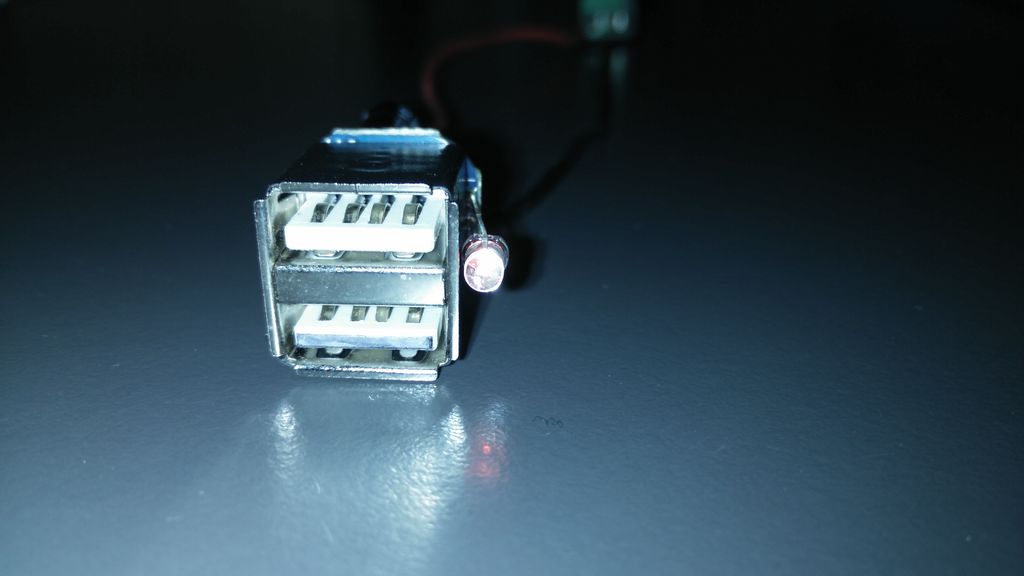
我們需要一個12V到5V的轉換器這將通過USB為樹莓派提供動力,所以我立即想到了一個車載充電器。這是一個廉價而實用的解決方案。
注意:在我們打開它之前,你應該確保你記得哪一個是可以提供2.1安培的端口,因為Pi需要
所以取下貼紙并擰下汽車頂部的電荷,然后松開底部的插針。之后它將很容易打開,焊接彈簧(+ 12V)和金屬彎曲物體(GND)松動,并用其中2根平衡線替換它們(將公側焊接到PCB)。
完成后,我檢查一切是否正確,將一個直流插孔連接到電線上,然后將其插入我的LED規定的電源并測量USB輸出電壓(兩個外部電壓為+ 5V和GND)。
如果一切正常,你可以用一些熱縮管和膠帶隱藏裸露的金屬部件。
注意: Dubbelcheck充電器上的極性,因為它可能不同。
步驟11:連接Pi,燈和GPS













現在是燈的電源。
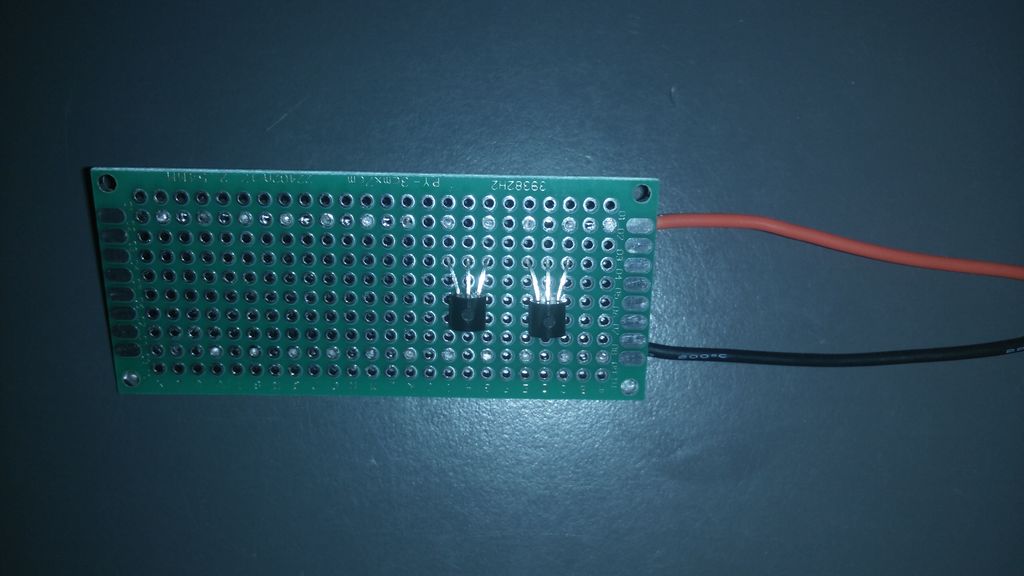
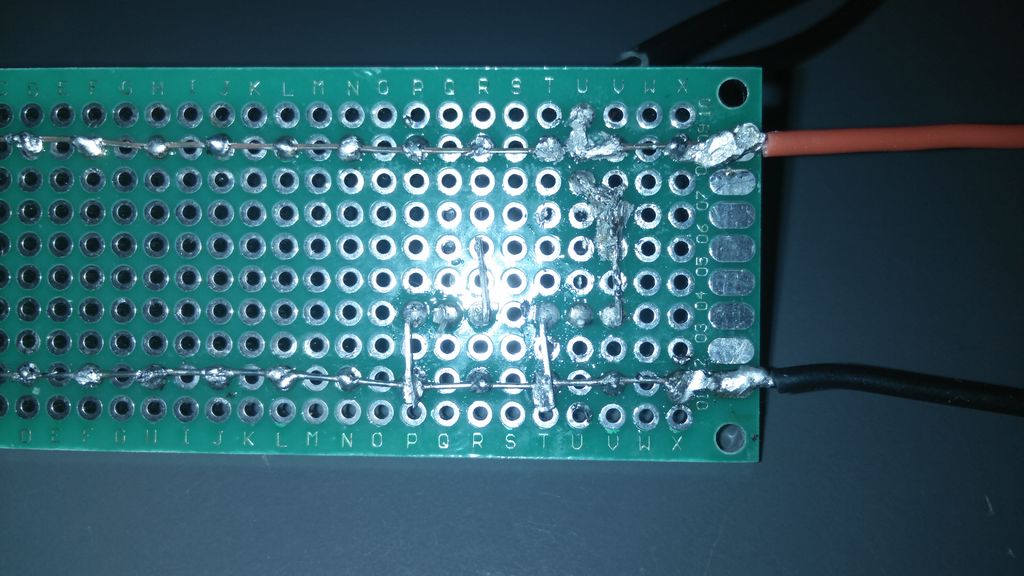
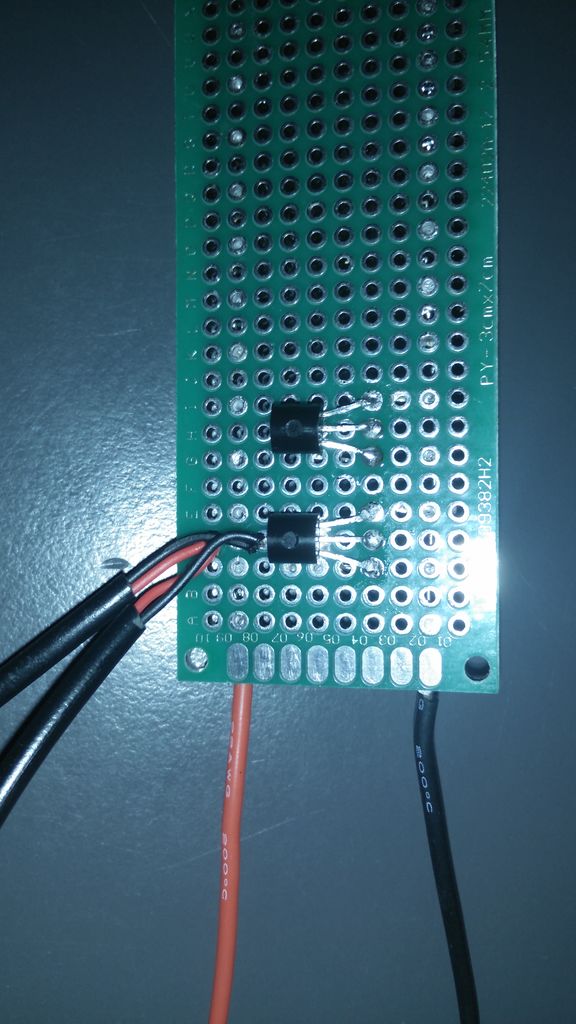
我們從uBEC收到12V電源,我們需要前燈,尾燈和車載充電器。樹莓派不能提供足夠的電流和電壓來供給LED,因此我們將不得不使用晶體管。 12V將用作電源,樹莓pi將通過控制NPN晶體管的基極(2N222:pic 2)來打開和關閉它們,所以讓它將其焊接到原型板上。
首先關閉所有的尾燈都是長板的背面,樹莓派將從前面進入,因此必須延長電纜(圖3-5)。尾燈有3根電線。黑色(負),黃色(運行/尾燈),紅色(制動/停止燈)。但是因為制動燈和行車燈之間只有很小的差別,所以我選擇使用紅線并單獨使用黃色線。將長的陽線放在后燈的金屬中并將其彎曲在一起,直到電線不再松動。對黑色和紅色線進行此操作。
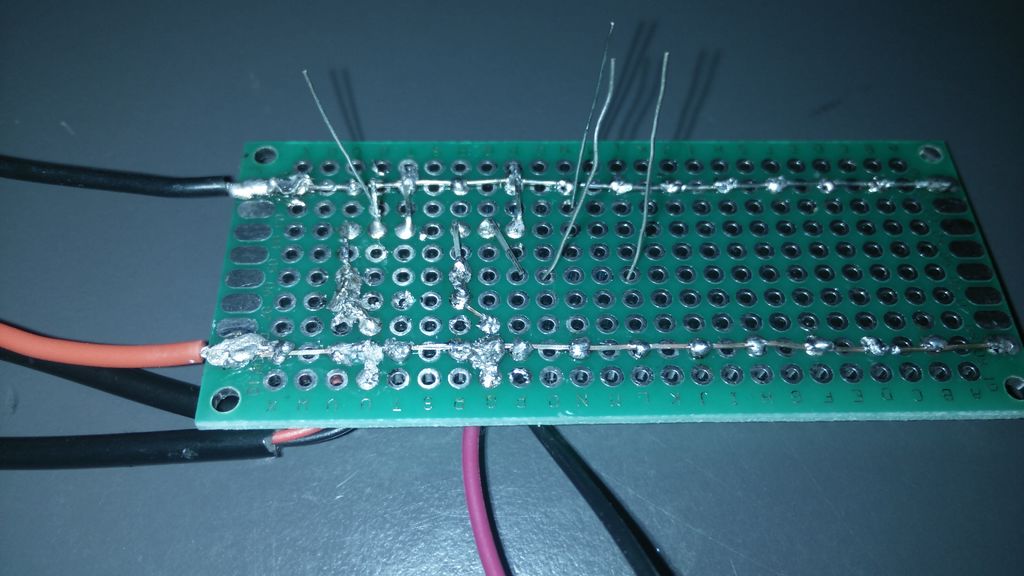
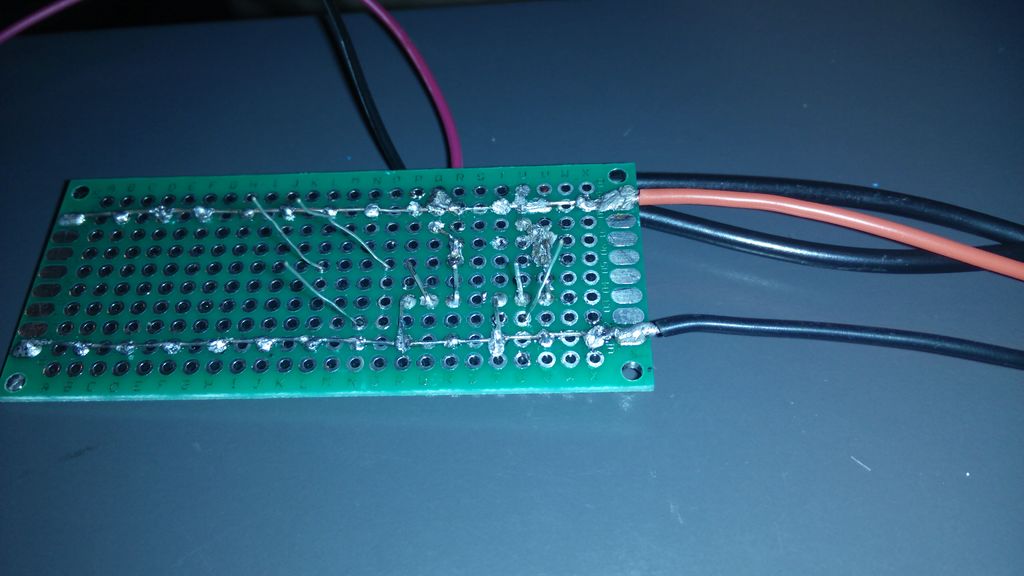
對于尾燈,請將它們平行焊接。然后是原型板。將兩根平衡線的母端焊接到電路板上,使用銅線在整個電路板上鋪設12V。然后添加晶體管,一個用于前燈,一個用于后燈。集電極 - 》 12V,發射極 - 》 GND到電阻的基極,然后是帶有母端的導線,它將安裝在樹莓派GPIO引腳(引腳20和21)上。車載充電器可以通過12V供電,然后將USB線連接到正確的USB輸入端,并將微型USB端放入樹莓派中。
連接GPS:
PI GPS
3.3V - 》 Vin
GND - 》 GND
RX - 》 TX
TX - 》 RX
注意:只有晶體管的2個基極引腳需要外部電阻來限制電流。燈不需要那些,因為它們內置于LED中。
第12步:住房





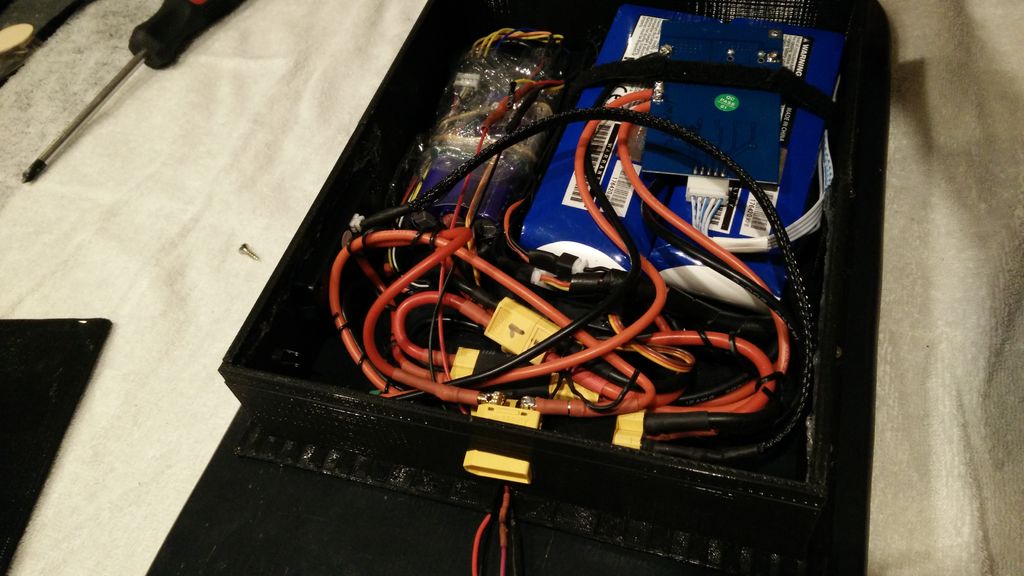







我將塑料薄膜中的零件包裹在一起,以確保所有鋼絲都牢固,然后更容易將我放入外殼中。我設計了發明家的所有部件,并用我的3D打印機打印出來。提供了所有發明人(.ipt)文件和打印機/切片器文件(.stl)。設計非常基礎。
背面(電動長板部件)
您可以將電池指示器插入和母XT90插頭然后放置塑料盒子。一旦外殼卡住,我用熱膠固定XT90插頭,以便在開關被拉入和拉出時它會卡住。我還在安裝XT90插頭的墻壁旁邊的外殼內側添加了一個螺絲,這樣當插入環形鍵時墻壁就無法壓入。
gps模塊的天線很長很長。所以我將兩端保持在盒子外面并將電線折疊到盒子的這一部分。
注意:使用不長的螺絲,然后長板厚!
一旦好了,我用防水插座替換了我的測試DC插孔。我將帶有母子彈連接器的電線焊接到連接到BMS板的電線上的電線和公子彈連接器上。再一次,電線不必太厚,因為充電器只能提供大約2安培的電流。使用一些較小的電線將插座插入外殼也更容易。..。..
正面(帶有GPS和燈光的覆盆子)
將屏幕滑入機箱背面。將電纜放入外殼內并擰緊。你也可能想在天線和覆盆子Pi之間加一些金屬箔,因為它非常有磁性,計算機并不總是這樣。
注意:小心當您將Tft屏幕滑入外殼時,您不會損壞任何控制觸摸的電纜。它發生在我身上。..。..
步驟13:基本設置Pi
首先,我們需要一張帶Raspbian的SD卡。你可以從這里下載raspbian。一旦下載,我們就可以在SD卡上安裝raspbian。您可以在計算機上使用Win32Discmanager或etcher安裝軟件。
安裝完成后,您必須添加一個名為‘ssh’的文件,無需擴展以啟用SSH上的SSH 。完成后,您可以啟動覆盆子并將其添加到您的網絡中。
pi將無法連接到您的網絡,因此您必須設置APIPA地址,這是IP地址, pi將在沒有連接到網絡時擁有。打開SD卡上的文件‘cmdline.txt’并添加APIPI地址。例如:‘ip = 169.254.10.5’。
注意:確保所有內容都在一行上或不起作用!
將SD放入PI,添加一條網線pi到您的計算機然后插上電源。
之后您可以使用Putty或者如果您使用mac,只需使用終端創建SSH連接。
ssh pi@169.254.10.5
添加無線連接:
要向您的pi添加新網絡,您可以輸入以下命令:
echo ENTER_ YOUR_PASSWORD | wpa_passphrase ENTER_YOUR_SSID 》》
/etc/wpa_supplicant/wpa_supplicant.conf
重新啟動后,您應該能夠找到路由器上的IP地址,并通過帶有該IP地址的ssh連接到你的pi。
ssh pi@IP_FROM_PI
總是找到你的ip有點煩人所以讓我們設置一個主機名,這樣我們就可以使用它了(在windown PC上需要安裝bonjour for this)。
sudo raspi-config nonint do_hostname CHOOSE_A_HOSTNAME
注意:要在將來使用主機名,你應該輸入如下的SSH規則:
ssh USER@YOUR_HOSTNAME.local
我們應該確保pi的系統和軟件包是最新的:
輸入以下命令來實現:
sudo apt-get update && sudo apt-get upgrade
步驟14:將項目放在你的Pi
新用戶
我為這個項目創建了一個新用戶‘longboard’:
我們需要轉到root
》 sudo -i
》 Adduser longboard
New password: 》 l0ngb0@rd
Full name: 》 electric longboard
你可以把剩下的留空。接下來我們需要給用戶“longboard”sudo的權利
》 adduser longboard sudo
之后我們將回到我們的退潮用戶
》 su longboard
軟件包
為項目安裝一些軟件包。用于托管網站數據庫的軟件包
》 python3 -m pip install --user --upgrade pip==9.0.3
》 sudo apt install -y python3-mysqldb mysql-server uwsgi nginx uwsgi-plugin-python3 rabbitmq-server
連接器數據庫,軟件包網站庫和GPS/tijdzone detectie
》 python -m pip install mysql-connector-python argon2-cffi Flask Flask-HTTPAuth Flask-MySQL mysql-connector-python passlib argon2 libgeos-dev pytz tzwhere
數據庫設置
檢查mysql的狀態
》 sudo systemctl status mysql
通過輸入此命令,您可以看到MySQL只偵聽127.0.0.1 - 》無法從網絡訪問,只在本地(在自己身上)。
》 ss -lt | grep mysql
以客戶端身份啟動客戶端
》 sudo mysql
創建用戶:
》 CREATE USER ‘project-admin’@‘localhost’ IDENTIFIED BY ‘@min_l0ngb0@rd’;
》 CREATE USER ‘project-longboard’@‘localhost’ IDENTIFIED BY ’l0ngb0@rd’;
創建數據庫和設置權限:
》 CREATE DATABASE longboard_db;
》 GRANT ALL PRIVILEGES ON longboard_db.* to ‘project-admin’@‘localhost’ WITH GRANT OPTION;
》 GRANT SELECT, INSERT, UPDATE, DELETE ON longboard_db.* TO ‘project-longboard’@‘localhost’;
》 FLUSH PRIVILEGES;
運行sql腳本創建表,它還將為網站創建默認用戶:
(用戶名: longboard,密碼:test):
》 source \home\logboard\longboard\longboard_db.sql;
》 exit
測試運行文件是否有效:
》 echo ‘show tables;’ | mysql longboard_db -t -u project-admin -p
創建一個目錄‘longboard’并從github克隆我的項目
》 mkdir longboard && cd longboard
》 git clone https://github.com/ThomasVantricht/electricLongboard.git
如果您使用了與我相同的目錄名和用戶,則不應調整conf目錄中的文件。
如果您不是應該調整文件(》 sudo nano conf/filename.extension)
一旦路徑正確,您必須將文件復制到系統目錄。有樹服務。
一個用于localhost上的kiosk站點。
一個用于帶數據庫連接的gps模塊
一個用于網絡上可用的站點
》 sudo cp conf/project1-*.service /etc/systemd/system/
》 sudo systemctl daemon-reload
》 sudo systemctl start project1-*
》 sudo systemctl status project1-*
當一切正常時,你應該啟用它們,以便它們在pi啟動時自動啟動:
(如果上一步失敗,那么你應該檢查配置文件中的路徑)
》 sudo systemctl enable project1-*
配置nginx服務:
將conf/nginx復制到‘sites-available’(并給它一個更好的名字)
刪除default-config的鏈接
鏈接到新配置/nginx
重啟以激活更改
》 sudo cp conf/nginx /etc/nginx/sites-available/project1
》 sudo rm /etc/nginx/sites-enabled/default
》 sudo ln -s /etc/nginx/sites-available/project1 /etc/nginx/sites-enabled/project1
》 sudo systemctl restart nginx.service
檢查nginx是否存活:
》 sudo systemctl status nginx.service
完成后,您的網絡上可以使用網絡服務器上的網絡服務器和本地主機上的網站啟動和停止會話離線。
步驟15:設置Kiosk模式Raspberry Pi

安裝軟件包
》 sudo apt-get install chromium-browser x11-xserver-utils unclutter
輸入pi的自動啟動文件user:
》 sudo nano /etc/xdg/lxsession/LXDE-pi/autostart
你必須注釋掉(把#放在t前面他行)現有規則:
#@xscreensaver -no-splash
接下來在屏幕保護線下添加這些行
@xset s off
@xset -dpms
@xset s noblank
@chromium-browser --noerrdialogs --kiosk http://127.0.0.1:8080/ --overscroll-history-navigation=0 --incognito --disable-pinch
點擊ctrl-O然后按ctrl-X寫退出并退出文件,然后輸入:
》 sudo raspi-config
從那里向下導航到boot_behaviour并將此設置更改為以桌面模式啟動,默認情況下以用戶pi身份登錄。
注意:退出自助服務終端模式,您可以輸入
》 sudo killall chromium-browser.
這將關閉所有鉻瀏覽器實例。
第16步:工作原理











當pi啟動時,您將看到IP地址在tft屏幕上以及所有用戶的列表。
您可以通過此屏幕離線啟動會話。你也可以控制你的燈。如果您在瀏覽器中鍵入IP地址,您將進入登錄屏幕。您可以使用默認用戶‘board’登錄(密碼:test)。或者您可以創建一個新帳戶。完成后,您將看到您的儀表板。在這里,您可以看到您的旅行路線和總距離,旅行時間。如果你進入長板標簽,你可以看到電路板的當前位置,你可以切換你的燈,你可以開始錄制會話。點擊“開始會話”后,PI會不斷確定位置并將其保存在數據庫中,直到您按下“停止會話”。如果GPS沒有修復,則無法啟動會話,您將在屏幕頂部收到警報。您的會話將顯示在Google地圖上。
-
電動滑板
+關注
關注
0文章
20瀏覽量
6945
發布評論請先 登錄
相關推薦
碳滑板電阻測試儀如何實現遠程監控和智能維護

使用碳滑板電阻測試儀進行測試的步驟
朗凱威鋰電池定制飛鴿電動滑板車48V磷酸鐵鋰電池組

博世與寧德時代攜手深化滑板底盤合作
光刻掩膜版制作流程
解析電動車充電架構與安全保護解決方案
電動汽車用電動機的種類及控制方法
電動車電動機的構成部件
時速高達25公里/小時的電動滑板車,在德國允許嗎?(ABE)

德國電動滑板車及電動助力自行車eKFV法規-ABE認證的解決方案
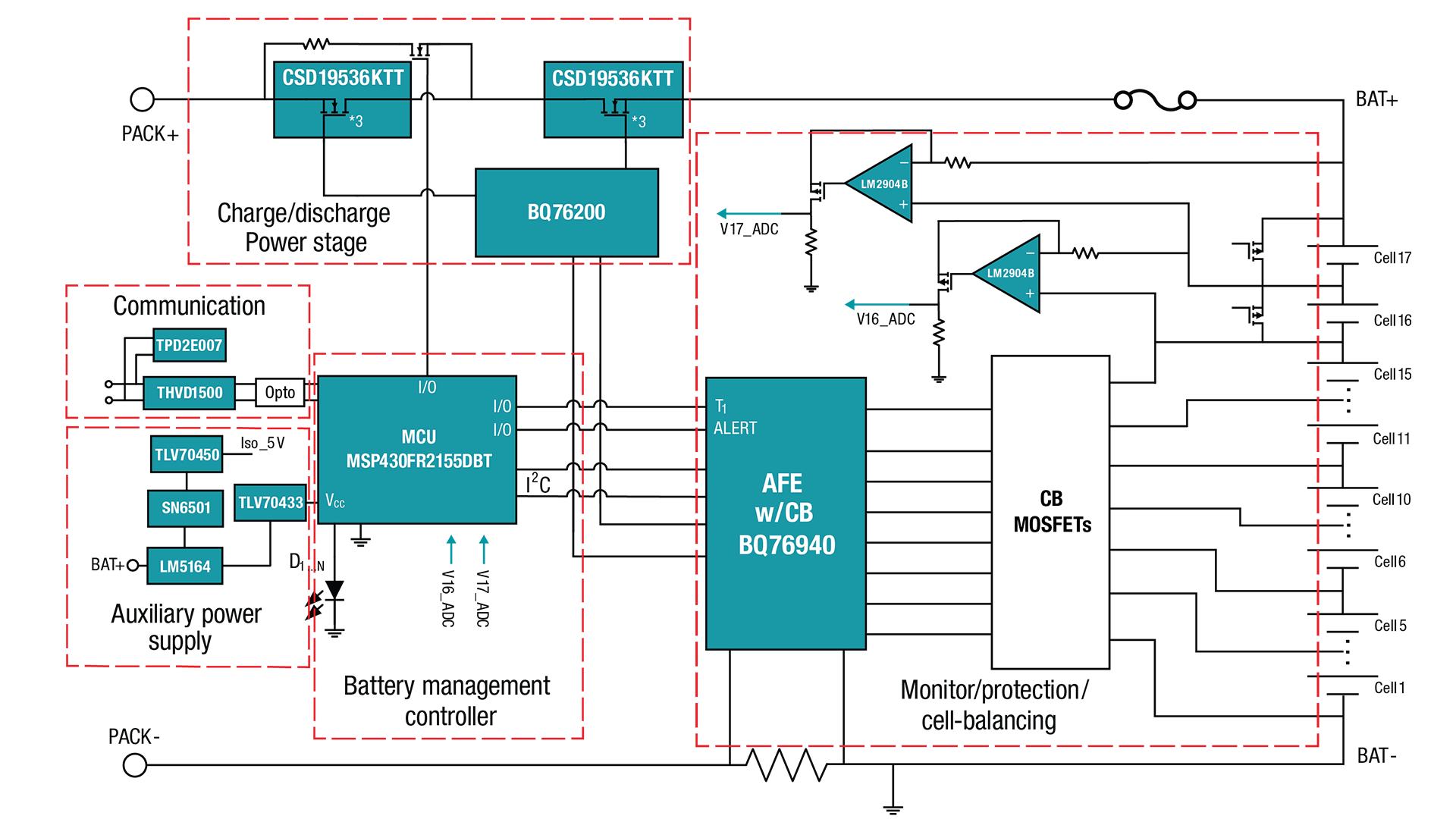
速度與激情:為電動摩托車設計壽命更長的 16S-17S 鋰離子電池組
TüV萊茵與坦途創新舉行電動滑板車合作實驗室授牌儀式






 工商網監
工商網監
評論