 2SD315使用注意事項
2SD315使用注意事項
2SD315使用注意事項
a、工作模式
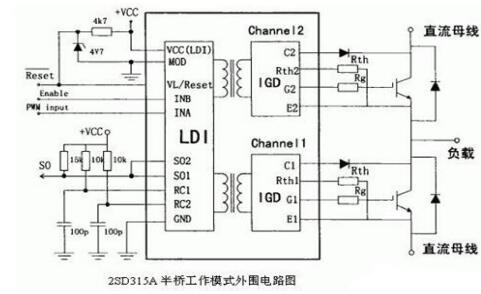
驅動模塊的模式選擇端MOD外接+15V電源,輸入引腳RC1和RC2接地,為直接工作模式。邏輯控制電平采用+15V,信號輸入管腳InA、InB連接在一起接收來自單片機的脈沖信號。
2SD315A的SO1和SO2兩只管腳輸出通道的工作狀態。當MOD接地時,MOD接地。通常半橋模式都是驅動一個直流母線上的一個橋臂,為避免上下橋臂直通必須設置死區時間,在死區時間里兩個管子同時關斷。
因此,RC1,RC2端子必須根據要求外接RC網絡來產生死區時間,死區時間一般可以從100n,到幾個ms.圖中所示的RC1,RC2分別連接lOk.的電阻和100pF的電容,這樣產生的死區時間大約是500ns.
b、端口VL/Reset
這個端子是用來定義具有施密特性質的輸入InA和InB的,使得輸入在2/3VL時開通,在I/3VL時作為關斷信號。當PWM信號是TTL電平時,該端子連接如圖3-5所示,當輸入InA和InB信號為15V的時候,該端子應該通過一個大約1K左右的電阻連接到++15V電源上,這樣開啟和關斷電壓分別應該是lov和5V.另外,輸入UL/Reset端還有另外的功能:如果其接地,則邏輯驅動接口單元l.DI001內的錯誤信息被清除。
c、門極輸出端
門極輸出Gx端子接電力半導體的門極,當SCALE驅動器用15V供電的時候,門極輸出土15V.負的門極電壓由驅動器內部產生。使用如圖3-6結構的電路可以實現開通和關斷的速度的不一樣,增加了用戶使用的靈活性。
d、布局和布線
驅動器應該盡可能近的和功率半導體放在一起,這樣從驅動器到電力晶體管的引線就會盡可能的短,一般來說驅動器的連線盡量不要長過10厘米。同時一般要求到集電極和發射極的引線采用絞合線,還有可以在IGBT的門極和發射極之間連接一對齊納穩壓二極管(15~18V)來保護IGBT不會被擊穿。
驅動模塊的模式選擇端MOD外接+15V電源,輸入引腳RC1和RC2接地,為直接工作模式。邏輯控制電平采用+15V,信號輸入管腳InA、InB連接在一起接收來自單片機的脈沖信號,進行同步控制。
2SD315A的SO1和SO2兩只管腳外接三極管和光耦用來向單片機輸出兩輸出通道的工作狀態,其輸出端結構皆為集電極開路輸出,可以通過外接上拉電阻以適用于各種電平邏輯。
在管腳SO1、SO2和電源之間,以及VisoX和LSX之間加發光二極管進行故障指示。正常情況下SO1和SO2輸出皆為高電平,上電后D3和D4先亮,延時幾秒后熄滅,同時D8和D15發亮。
當檢測到故障信號時,SO1和SO2的輸出電平被拉低到地,即D3和D4發亮,同時D8和D15閃爍。2SD315A是通過監測UCE(sat)來判斷回路是否短路和過流,當檢測到一路或兩路發生過流現象時,檢測電路會把異常狀態回饋到驅動模塊,驅動模塊內部會產生一個故障信號并將它鎖存,鎖存時間為1s,在這段時間內,驅動模塊不再輸出信號,而是將兩組IGBT及時關斷予以保護。
同時,狀態輸出管腳SO1和SO2的高電平被拉低,光耦TLP521導通,兩路狀態信號通過或門74LS32送給單片機。為防止因關斷速度太快在IGBT的集電極上產生很高的反電動勢,在門極輸出端采用如圖3.11所示的電路結構實現開通和關斷速度的不同。開通時門極電阻為3.4Ω,關斷時電阻為6.8Ω,二極管采用快恢復型,這樣就使關斷速度下降到安全水平。這是一張縮略圖,點擊可放大。按住CTRL,滾動鼠標滾輪可自由縮放。
-
2SD315
+關注
關注
1文章
4瀏覽量
12331 -
驅動模塊
+關注
關注
0文章
62瀏覽量
14155
發布評論請先 登錄
相關推薦

采用高側N-MOSFET的堆疊式BQ769x2設計注意事項

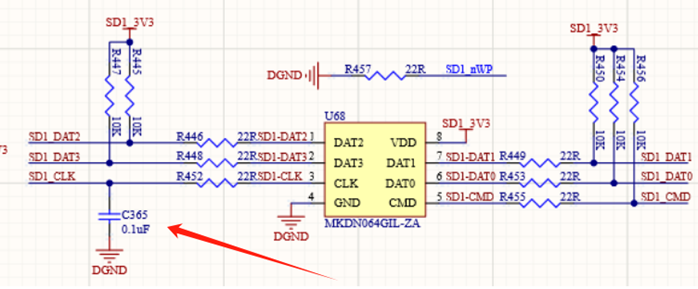
SD NAND的CLK引腳的注意事項和走線規范
測速電機: 常見6大注意事項






 工商網監
工商網監
評論