 數字示波器的抖動噪聲基底是什么
數字示波器的抖動噪聲基底是什么
數字示波器的抖動噪聲基底(Jitter Noise Floor)指標經常會被誤會和誤用,那么抖動噪聲基底到底是什么?抖動噪聲基底是示波器本身對抖動測量結果貢獻的整體噪聲,它經常被標定為統計結果,用有效值或標準偏差值(在平均值為0時,標準偏差值和有效值相同)來表示。
如果抖動噪聲基底遠小于希望測量的信號抖動,那么示波器就是測量抖動的正確儀器,相反,如果抖動噪聲基底遠高于希望測量的抖動,那么示波器就不是合適的儀器。
時基抖動(timebase jitter)是抖動噪聲基底的一部分,它源于示波器的時基(clock)的抖動,即輸入信號在被采樣的時間上的抖動。
抖動噪聲基底的另外一部分來自于示波器的垂直噪聲(vertical noise)。抖動測量是基于信號與某閾值的交叉點的時刻與理想中它應該和某閾值交叉點的時刻進行比較后的結果。垂直噪聲帶來了測量的誤差,看起來是添加了更多的抖動。誤差的大小取決于噪聲的大小以及信號在閾值位置的轉換速率(斜率)。更大的噪聲意味著更大的抖動,更快的斜率意味著更小的抖動。下圖說明了垂直噪聲如何轉換為抖動。
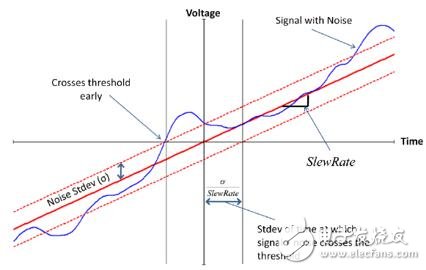
等式(1)說明了如何基于垂直噪聲的標準偏差和信號的斜率來計算垂直噪聲帶來的抖動。

抖動噪聲基底是時基抖動和垂直噪聲引起的抖動的有效值之和。等式(2)說明了它們之間的關系。當垂直噪聲等于0或者斜率無窮大時,抖動噪聲基底等于時基抖動。

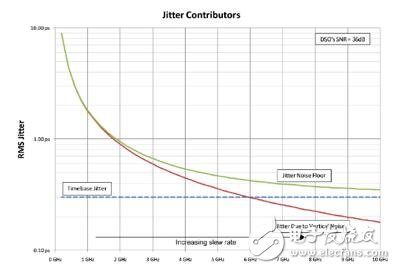
下圖表示了抖動噪聲基底,時基抖動和垂直噪聲在不同斜率時引起的抖動之間的關系(圖表中是假設正弦信號滿柵格,信噪比為36dB)。
如前所述,抖動噪聲基底取決于示波器的垂直噪聲,輸入信號的斜率和示波器的時基抖動。當比較示波器的抖動性能時,非常重要的一點是要理解抖動噪聲基底或時基抖動是否被正確的標定了。如果對抖動噪聲基底進行標定,還需要知道垂直噪聲和相應的信號斜率。
當決定是否可以用某款示波器測量DUT的抖動時,就需要計算對于特定設置下的抖動噪聲基底,為此,測量示波器的噪聲的標準偏差(將示波器設置為將需要測量的DUT抖動的狀態,去掉信號,測定stdev值),估計信號的斜率(有些示波器具有斜率測量參數),計算垂直噪聲引起的抖動大小。Datasheet中的抖動噪聲基底一般是基于經常用到的斜率/噪聲測量到的,如果由于垂直噪聲引起的抖動大于Datasheet中的值,就應當使用自己的抖動噪聲基底。
-
數字示波器
+關注
關注
6文章
522瀏覽量
33565 -
正弦信號
+關注
關注
0文章
45瀏覽量
16532
發布評論請先 登錄
相關推薦
怎么用數字示波器分析諸如電氣噪聲等隨機信號

數字示波器提供的工具如何用來表征噪聲
怎樣將相位噪聲和抖動降至最低及其估算方法
數字示波器的高精度抖動測試方法
抖動傳遞性能和相位噪聲測量技術
VSA與N9030噪聲基底差異是什么
8步教你進行實時示波器的抖動測量
測量較低時鐘頻率的相位噪聲和相位抖動
時鐘抖動(CLK)和相位噪聲之間的轉換

示波器的噪聲來源及電源紋波噪聲的測試方法


如何理解相位噪聲與時間抖動的關系?

示波器測量之抖動的四個維度
時鐘抖動與相位噪聲的關系
電源軌噪聲對系統時鐘抖動的影響






 工商網監
工商網監
評論