 航模遙控開關的電路圖合集和講解分析概述
航模遙控開關的電路圖合集和講解分析概述
航模遙控開關電路圖(一):單通道航模遙控器的構造
遙控裝置一般應用于車模、航模等領域,用以實現對靶機、航模、玩具等的自動控制。下面介紹一種無線比例電機遙控器的制作方法。它選用易購元件,具有原理簡單、性能可靠的特點。
電機遙控路的工作原理
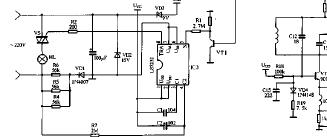
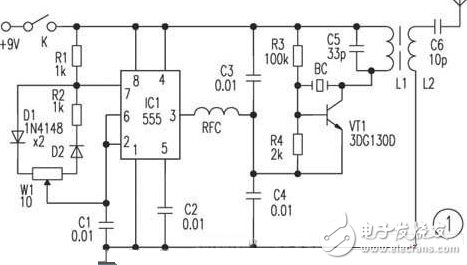
圖1(下圖)為遙控發射電路。555集成塊與R1、R2、RP1、VD1、VD2及C1組成一無穩態大范圍可變占空比振蕩器。圖示參數的振蕩頻率為50Hz左右,通過RP1阻值的調節,占空比的變化范圍可達到1%一99%,由③腳輸出50Hz方波信號。VT1及外圍元件構成晶體穩頻電容三點式振蕩器,石英晶體的諧振頻率選用27.145MHz。本電路采用石英晶體穩頻,所以工作可靠。VT1振蕩產生的高頻載波經555電路③腳的方波信號調制,由天線發射出去。
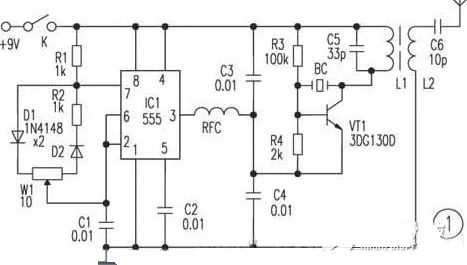
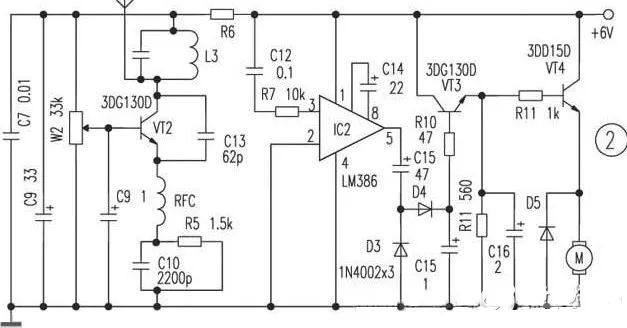
圖2(下圖)為接收驅動電路。為簡化接收電路,由VT2及其外圍元件構成超再生檢波器,檢出原方波調制信號。由C12、R7加至IC2的③腳進行放大,放大后的信號經VD3、VD4倍壓整流,由VT3射隨器輸出平滑的直流電壓。該電壓的大小與發送的不同占空比信號波形有關,占空比大,電壓高,經R11為VT4提供的偏置電流大,電機的轉速高;占空比小,電壓低,經R11為VT4提供的偏置電流小,電機轉速慢。當占空比足夠小時,VT3截止無輸出,VT4因失去偏置而不導通,電機M停轉。由此可得電機轉速與占空比成正比關系。
元器件的選擇
L1可用10K型中周骨架,用Φ0.15高強度漆包線繞9匝,L2在L1的外層用同型號漆包線繞3匝,不用屏蔽罩,但需旋入磁芯。L3同L1制作。B用JAl2等金屬殼諧振器,頻率在27-29.8MHz之間。VT1、VT2、VT3均用3DG130D型NPN三極管,β》100。VT4選用3DD15D型大功率管。RFC用18uH色碼電感。IC1的型號為NE555。IC2的型號為LM386。電容除標明的電解電容外均用CC1型高頻瓷介電容。電阻均用1/8w碳膜電阻器。
電路的調試
先調發射機載頻振蕩器,高頻扼流線圈RFC及晶振B暫不裝上,使C4對地短路。調節R3阻值,使VT1的集電極電流為12mA,然后裝上晶振B,此時電流會增至15mA左右,否則應仔細調節L1的磁芯,直至電路起振為止,去掉C4短路線。超再生檢波的調試方法是用800Ω的高阻耳機串聯一個10uF電容器跨接在VT2的發射極與集電極之間,用無感起子細調電位器RP2及線圈L3的磁芯,直至耳機中有明顯響亮的“沙沙”聲為止。下一步將發射機天線靠近接收機,接通通控開關S,微調發射機和接收機中線圈的磁芯,直至耳機中能聽到清晰的工頻聲為止,然后拉開兩機距離,再進一步細調。其余電路無須調試,一般裝好后即可正常工作。
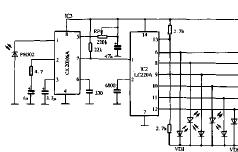
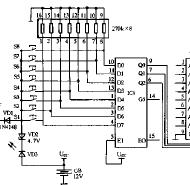
航模遙控開關電路圖(二) 五通道航模遙控器的電路圖
航模遙控器的電路圖,比例遙控的,五通道,元件好找
航模遙控開關電路圖(三)
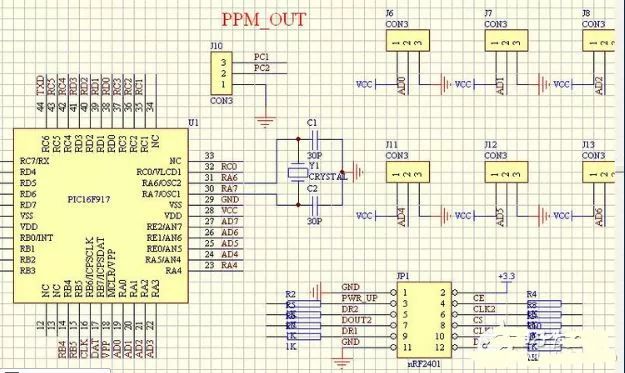
根據遙控器內部空間結構,昨天剛畫完整的PCB板子,主控單片機換成了PIC16F917,無線遙控模塊先用NRF2401測試,等OK了再換成距離遠一點的無線模塊;最多8通道,PCB還在打樣中。部分原理圖和PCB如下圖所示:
航模遙控開關電路圖(四) 六通道航模遙控發射接收機電路原理分析
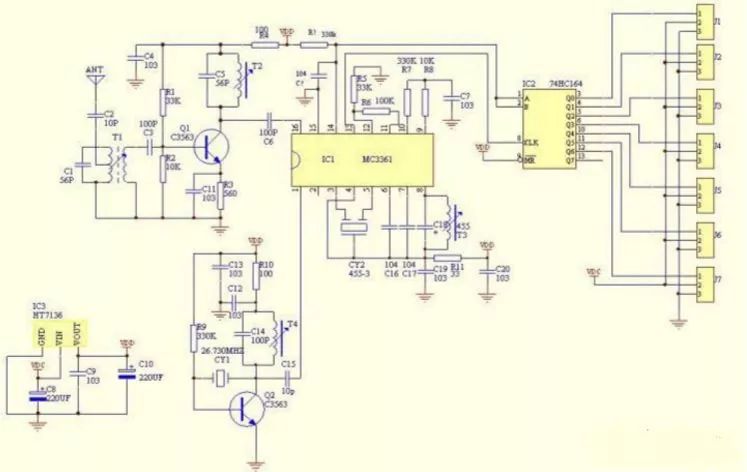
這種六通道航模遙控發射接收機電路,可對燃油發動機航模飛機的水平、垂直尾翼、襟翼和發動機等各種動作參數進行數字比例遙控,亦可對需要數字比例遙控的其它艦船模型進行有效的控制。
現在分別對發射機和接收機電路的工作狀態作一分析:
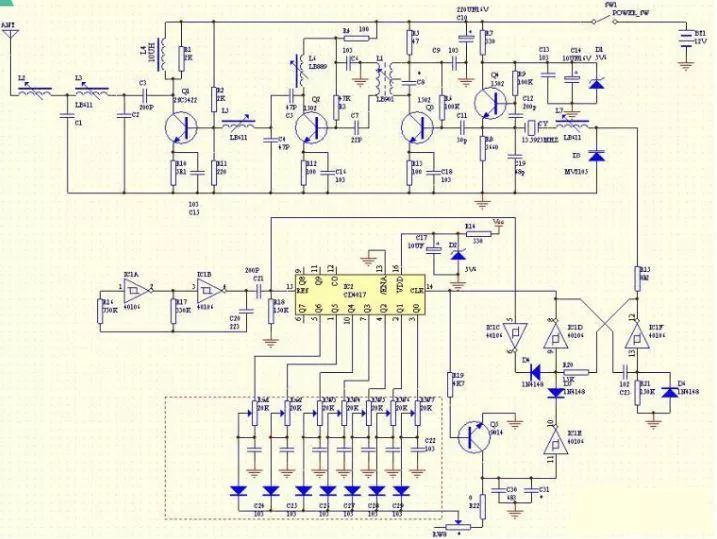
發射機電路如下圖所示。
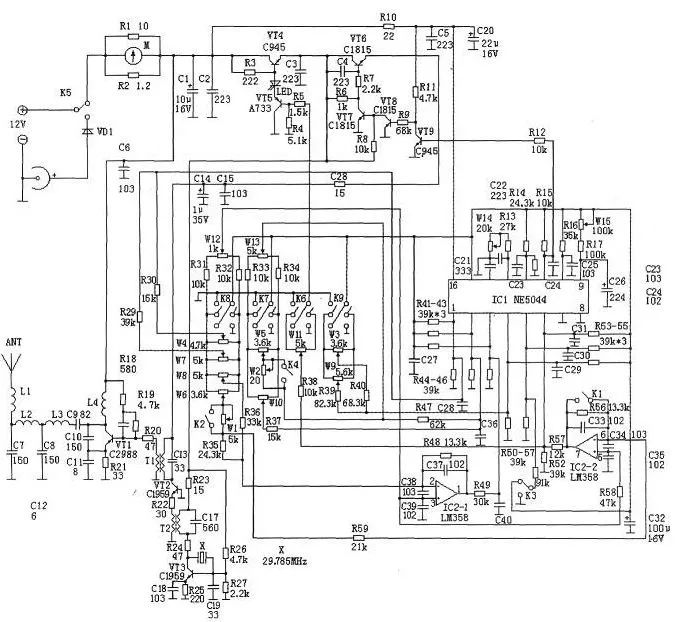
六通道數字比例信號的產生由下圖中IC1擔任,IC1是可編程7通道RC編碼器集成電路NE5044,IC1的1-7腳上外接分壓電路,利用這些引腳上電壓的變化,對IC1的11腳輸出的串行脈沖群分別單個進行脈沖寬度調制,因為本機僅用六通道,所以IC1的7腳接地。
IC1的1-6腳的控制電壓在0-5V之間變化,15腳輸出的5V基準穩壓源提供各級電路所需穩定電壓。由于控制電路比較復雜,現對各通道控制回路和功能作一簡單介紹:
升降(elevator)調節:IC1的1腳電壓由W4和W7進行調節,通過接收機的舵機電路對升降舵進行小幅度控制;而大幅度控制是通過W6、W8和Wl產生的控制電壓經運算放大器2-1放大后,再對IC1的3腳的電壓進行較大幅度的控制,以實現飛機升降中的不同幅度數字比例遙控。對W12的調節是在發射機內作一次性調整襟翼(flap,aileron)控制:襟翼是大型模型飛機主翼后側的副翼,在飛機起降中擔負重要作用。發射機上對它的的控制是通過W5、Wl0和W2調節IC1的2腳上的電壓進行的,對W13的調節是在發射機內作一次性調整。
方向舵(rudder)控制:由W3和W9對IC1的4腳電壓進行控制,以實現對飛機垂直尾翼上方向舵進行控制。
發動機動力控制:是通過Wll對IC1的6腳電壓進行控制,從而通過接收機的舵機電路對發動機油門上的節氣閥門(throttle)進行數字比例遙控,最后達到對發動機動力控制的目的。
另外,由開關K3對IC1的5腳電壓作0V和5V的切換,以形成兩檔變速開關。
有時飛機在爬升的同時需要發動機增大馬力,在電路上是通過運算放大器IC2-2將W6控制的升降信號放大后送到IC1的6腳,這樣一來,IC1的3腳和6腳的電壓同時變化,以實現飛機在爬升的同時增大發動機動力。如不需此項控制,可閉合Kl。
K2和K4的閉合可增加控制能力。K6、K7、K8和K9均為雙刀雙擲開關,稱之為倒向開關,可使對IC1的1-6腳的控制電壓改變極性,目的是使電位器的操縱手柄變動方向與飛機的飛行運動方向一致,如將W3的操縱手柄向右推動時飛機原向左轉,這時可撥動K9使飛機向右轉、以順應操縱習慣。
IC1的11腳輸出的串行脈沖群如下圖中第1條波形圖所示。該信號經VT9放大倒相后,再經VT8放大恢復原形,然后,每當VT7導通時VT6截止。VT6提供給發射機共基丙類放大推動級VT2的電壓波形如下圖中第2條波形圖所示。
實際上,這波形是VT3產生的29.785MHz本振信號的包絡波形,是經脈沖寬度調制的調幅波,在其中可看出本發射機各通道信號在脈沖群中對應的位置,各通道控制電位器改變電壓可使對應脈沖寬度在0.7-1.7ms之間發生變化,IC1的1-6腳上電壓越高,輸出對應脈沖寬度越窄。發射機所發射的脈沖群周期約為24ms,周期長度可由W15微調。
經VT2放大的調幅波通過耦合變壓器Tl在VT1中進行高頻功率放大,再經濾波網絡送到天線,發射到空間。
發射機電源由機內10節1.2V鎳鎘電池供電,K5為電源開關,M為輸出電壓表,表示發射級工作電流,因其它各級電流較小、故近似用總電流表示發射級工作電流。
IC1電源由Rl0直接提供,IC1的15腳輸出的5V基準電壓通過VT5控制VT4電流,平時VT6在R6作用下一直導通提供推動級VT2電源,只有當IC1的11腳有正脈沖群來到時才會截止。
-
振蕩器
+關注
關注
28文章
3832瀏覽量
139033 -
遙控器
+關注
關注
18文章
836瀏覽量
66058 -
驅動電路
+關注
關注
153文章
1529瀏覽量
108492
原文標題:航模遙控開關電路圖大全
文章出處:【微信號:changxuedianzi,微信公眾號:暢學電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
航模遙控開關電路圖資料下載






 工商網監
工商網監
評論